
一种正交夹持的钢球螺旋全展开方法与机构
2019-09-03 03:18濮海明康宜华
中国机械工程 2019年16期
濮海明 王 哲 康宜华
1.华中科技大学机械科学与工程学院,武汉,4300742.上汽大众汽车有限公司,上海,201805
0 引言
钢球表面全部展开是进行钢球自动化探伤的重要基础。它既要使传感器能对钢球表面进行全检测,确保不存在检测盲区,又要降低检测的重复区域,满足高效率的检测需求,使其适用于钢球的在线自动化探伤。
捷克KROB公司开发的AVIKO系列钢球探伤仪[1]中采用的子午线展开机构是目前应用最广泛的球面展开机构。赵刚等[2]、赵彦玲等[3-4]基于子午线展开机构做了大量的理论分析与参数优化等工作;MASAKI等[5]提出了一种采用双驱动锥轮的钢球表面展开机构;王宏等[6]设计了一种经纬展开方式的钢球表面展开系统;王义文[7]、刘德利[8]基于图像处理技术设计了一种摩擦盘展开机构。但上述方案在工程应用中存在成本高、零件易损、有检测盲区以及检测效率低等问题。
本文针对现有方案的不足以及企业的实际需求,分析了钢球表面全部展开的基本原理,通过运动学分析以及坐标变换等建立了钢球表面螺旋全展开的运动轨迹线方程,并研究了运动轨迹线密度的影响因素,最终设计了一套基于正交夹持的钢球表面螺旋全展开机构。
1 钢球表面螺旋全展开的原理分析
钢球表面在几何学的领域内属于无法展开的复杂曲面,它无法像圆柱体、圆锥体的表面一样,通过沿着母线“切开”的方法,将其表面铺展成一个平面。
图1所示的空间坐标系Oxyz中,钢球球心的坐标为O(0,0,0)。检测探头处于x轴的正上方且正对着钢球,假设探头在钢球表面有效探伤区域的宽度为d。当钢球以ωz的角速度绕z轴旋转360°后,探头在钢球表面的检测区域是宽度为d的环形面,如图1a所示。

图1 钢球表面展开运动示意图Fig.1 Unfolding the whole surface of steel ball
如果钢球同时以ωx的角速度绕x轴旋转一定角度α,此时检测探头在钢球表面的检测区域是两条非重合的环形面,如图1b所示。当钢球以ωx的角速度绕x轴旋转180°后,探头在钢球表面的检测区域是一系列的环形面;当相邻环形面的边缘相切时,便能够实现钢球表面的全部展开。
由上述分析可以推断:钢球表面能够展开的基本条件是钢球绕直角坐标系中两个正交轴同时作旋转运动。本文将钢球绕z轴的旋转运动定义为主轴转动,将钢球绕x轴的旋转运动定义为展开转动。主轴转动与展开转动的合成运动构成了钢球表面的展开运动,由此得到的钢球表面展开运动轨迹线是一条螺旋线,如图2所示。

图2 钢球表面展开运动轨迹线Fig.2 Unfoldingtrajectory on the surface of steel ball
2 建立运动轨迹线的数学模型
建立合适的、有效的数学模型来描述钢球表面螺旋全展开运动轨迹线的可寻规律,将有助于了解钢球表面的展开过程,同时有助于展开机构的参数优化等。
如图3所示,钢球分别以ωz和ωx的角速度绕z轴和x轴同时旋转。当钢球绕z轴转动β角度后,建立的空间坐标系Oxyz也绕z轴转动了β角度形成新的空间坐标系Ox′y′z′。设i、j、k分别表示与坐标系Oxyz中x轴、y轴、z轴正向同向的单位矢量,合成角速度ω可以表示成
ω=ωxcosβi+ωysinβj+ωzk
(1)
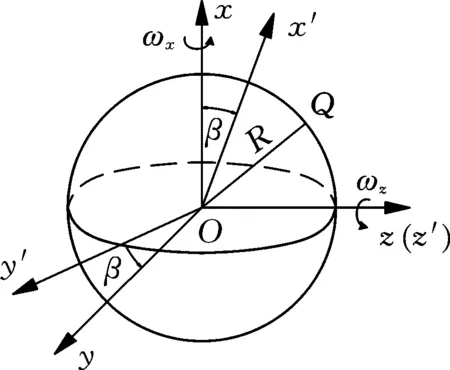
图3 钢球表面全展开的坐标系变换示意图Fig.3 Coordinate system transformation on the surface of steel ball
用向量r表示任一时刻t被检测钢球表面上的任意一点Q(x,y,z)的位移矢量,则有

(2)
式中,R为钢球的半径。
根据运动学关系,能够得到钢球表面上任意一点Q某一时刻t的瞬时速度v=ωr。
其瞬时速度还可以表示为
(3)
结合两种瞬时速度表达方式,则有:
(4)
将β=ωzt代入式(4),可以得到运动轨迹线方程:
(5)
式(5)所示方程组属于一阶微分方程组,没有固定的求解规律。图3中的空间坐标系Oxyz变换为Ox′y′z′,容易得到坐标系变换之间的关系式:
(6)
将式(6)代入式(5)可以得到:
(7)
由初始条件(x,y,z)|t=0=(x0,y0,z0)可得
(8)
将式(8)代入式(6),能够求解出钢球表面螺旋全展开运动轨迹线的方程:
(9)
综上可得,通过运动学的基础方法,建立了钢球表面螺旋全展开的数学表达式;利用坐标变换求解出钢球表面螺旋全展开的运动轨迹线方程。当已知钢球表面上某点的初始值Q0(x0,y0,z0)时,根据展开运动的轨迹线方程可知该点在任意t时刻的位置Qt(x,y,z)。
3 钢球表面螺旋全展开过程分析
本文借助MATLAB软件的数理计算功能及函数可视化功能,依据钢球表面螺旋全展开的运动轨迹线方程(式(9)),分析钢球表面全展开的过程,并研究了运动轨迹线密度的影响因素。
以直径54 mm的钢球为例,假设检测一个钢球需要用时4~5 s,则钢球绕x轴旋转的角速度ωx在1~2 rad/s的范围内并以0.5 rad/s为步进量进行取值;绕z轴旋转的角速度ωz在10~80 rad/s的范围内并以10 rad/s为步进量进行取值。利用MATLAB得到了一组钢球表面螺旋全展开的运动轨迹线,见图4、图5和图6。

图4 ωx=1 rad/s时钢球表面螺旋全展开运动轨迹线Fig.4 Unfolding trajectory on the surface of steel ball with ωx=1 rad/s
分析图4、图5与图6可得,钢球表面螺旋全展开运动轨迹线的密度与钢球的主轴转动角速度ωz和展开转动角速度ωx的取值有很大关系。当ωx保持不变时,运动轨迹线随ωz的增大而逐渐密集,螺旋圈数增多,螺距减小;当ωz保持不变时,运动轨迹线随ωx的增大而逐渐稀疏,螺旋圈数减小,螺距增大。
通过多次仿真计算,分析展开运动轨迹线的变化规律,得到了螺旋圈数和螺距大小的变化曲线,如图7所示。
由图7可得螺旋圈数n与螺距s的关系:
(10)
(11)
钢球表面螺旋全展开运动轨迹线的密度对避免探伤盲区、提高探伤效率具有较大的影响。如果展开轨迹线较稀疏,即螺旋线的螺距比探头的有效探伤范围大,容易产生漏检;如果展开轨迹线过于密集,即螺旋线的螺距比探头的有效探伤范围小,钢球表面则有较多的区域被重复检测,则会降低探伤效率。
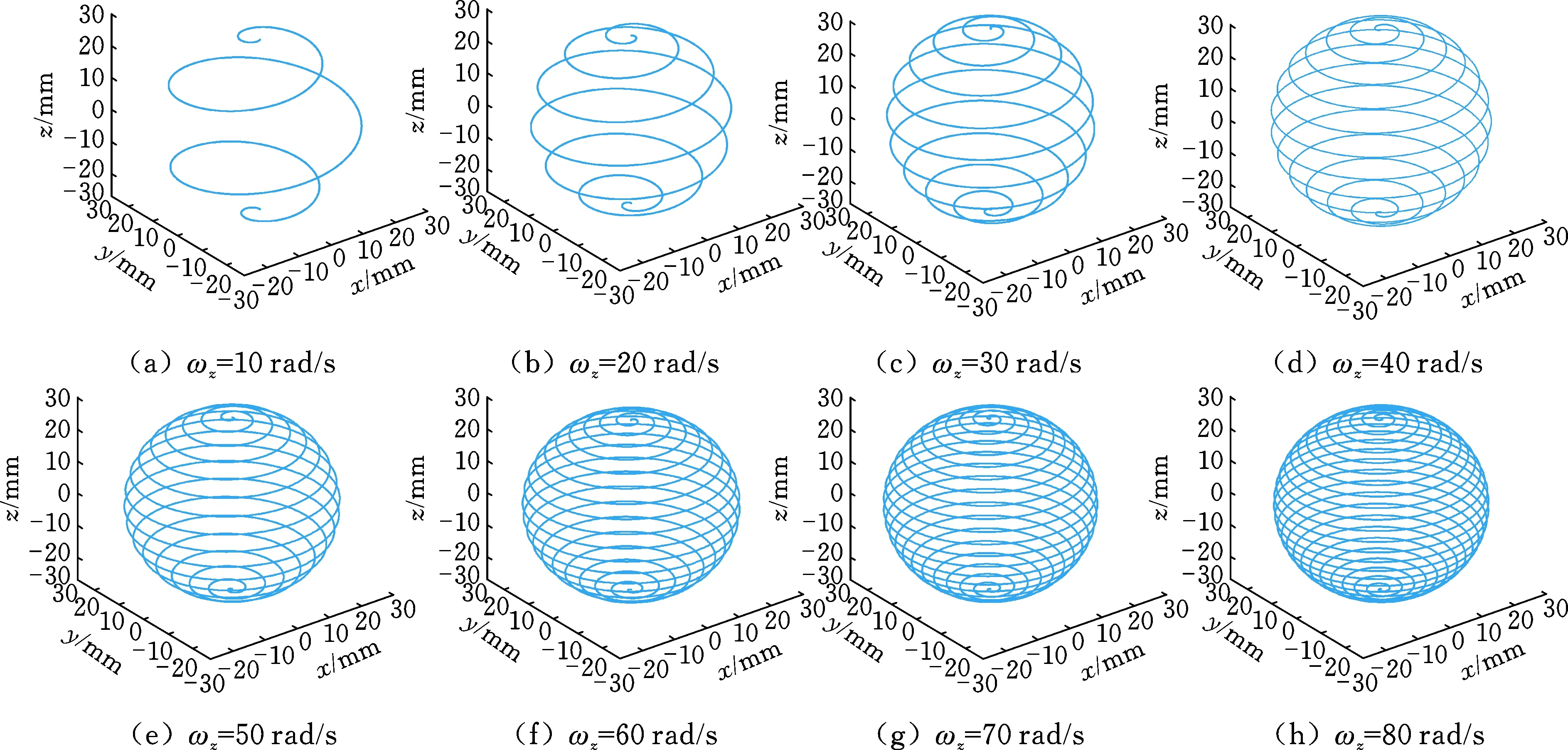
图5 ωx=1.5 rad/s时钢球表面螺旋全展开运动轨迹线Fig.5 Unfolding trajectory on the surface of steel ball with ωx=1.5 rad/s
图6 ωx=2 rad/s时钢球表面螺旋全展开运动轨迹线Fig.6 Unfolding trajectory on the surface of steel ball with ωx=2 rad/s

图7 螺旋圈数及螺距的变化规律Fig.7 The changing rule of cycle number and pitch
因此,当钢球的直径规格和检测探头在钢球表面的有效探伤范围已知的条件下,根据式(10)和式(11)可以选择合理的主轴转动角速度ωz和展开转动角速度ωx,使得螺距s和探头的有效探伤范围相匹配,满足钢球的自动化探伤需求,既保证检测效率,又不会造成漏检。
4 基于正交夹持的钢球表面螺旋全展开机构
由上文分析可知,钢球绕z轴的主轴转动与绕x轴的展开转动,二者的合成运动实现了钢球表面的全部展开。据此设计了钢球表面螺旋全展开的机械结构装置,如图8所示,通过手指气缸夹紧钢球,由直流电机驱动钢球实现主轴转动,由步进电机驱动手指气缸旋转,进而实现钢球的展开转动。
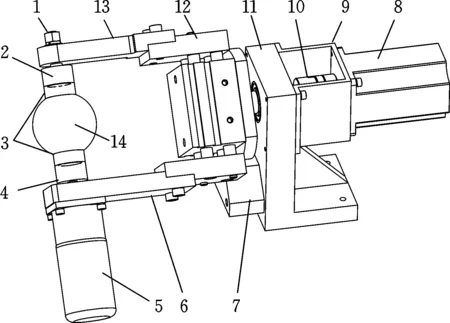
1.从动轴 2.转接块1 3.夹紧块 4.转接块2 5.直流电机6.电机安装臂 7.限位块 8.步进电机 9.电机安装板10.联轴器 11.轴承座 12.夹紧气缸 13.延长臂 14.钢球图8 钢球表面螺旋展开的结构示意图Fig.8 Mechanism of spiral line unfolding the surface of steel ball
该钢球表面展开机构说明如下:
(1)夹紧块需要根据钢球的直径规格匹配使用,其夹紧面的半径尺寸与待检测钢球的半径尺寸一致,夹紧块定位安装在转接块上。
(2)转接块2连接固定在直流电机的输出轴上,由直流电机驱动旋转。
(3)手指气缸定位安装在传动轴上,传动轴与步进电机之间通过联轴器作用,实现驱动旋转。
分析图8所示的展开机构可知,钢球在展开过程中被夹紧块夹紧的夹持面属于检测盲区,一个螺旋展开装置无法将钢球表面全部展开,需要两个正交位置关系的展开机构配合运动。最终设计的基于正交夹持的钢球表面螺旋全展开机构如图9所示。
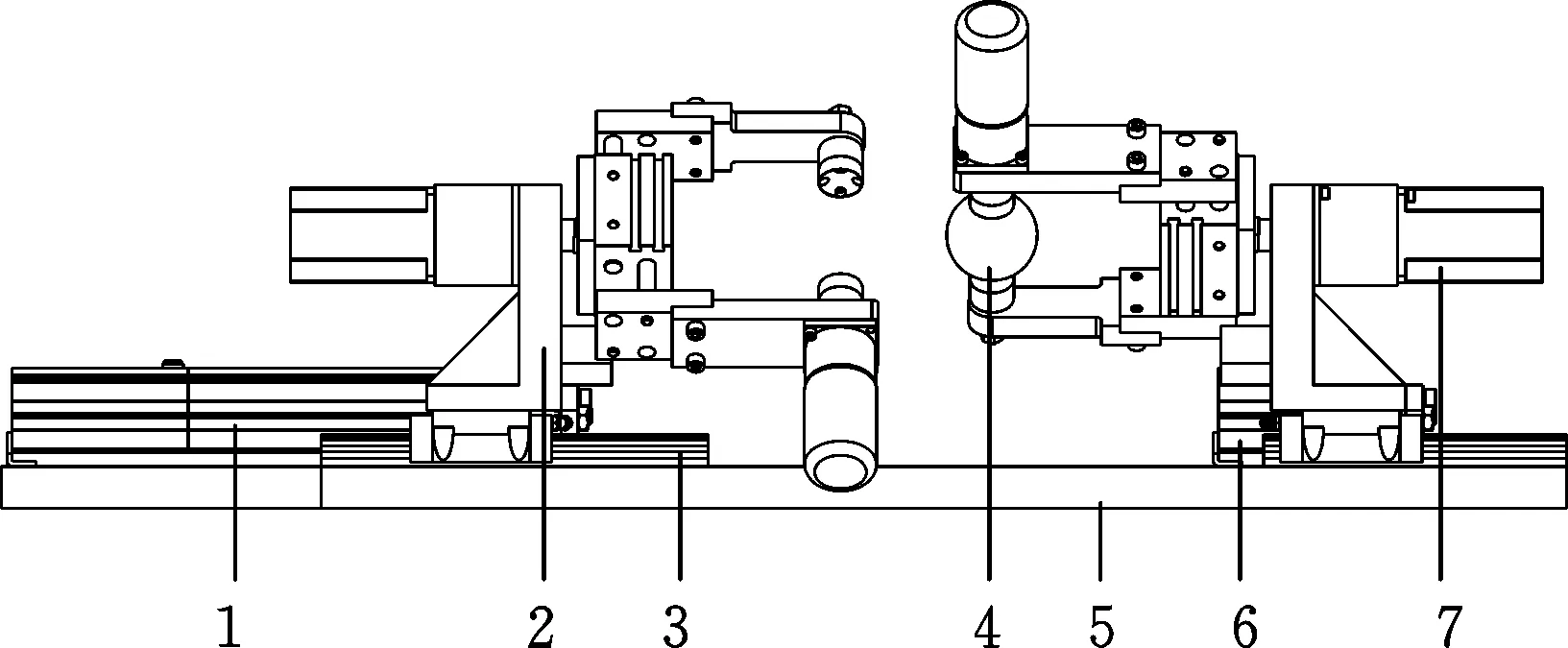
1.横移气缸1 2.展开机构1 3.直线导轨 4.钢球5.安装底板 6.横移气缸2 7.展开机构2图9 正交夹持的钢球展开机构Fig.9 Orthogonal clamping and unfolding mechanism of steel ball
该机构的展开动作流程如下:
(1)展开机构1在上料工位处夹紧待检测的钢球。
(2)横移气缸1驱动展开机构1至检测工位,步进电机与直流电机同时运转,进行钢球的展开检测直至检测完毕。
(3)横移气缸2驱动展开机构2至检测工位,展开机构2夹紧待检测钢球,展开机构1松开钢球并回位至上料工位。
(4)展开机构2中的步进电机与直流电机同时动作,进行钢球的展开检测直至检测完毕。
(5)展开机构2回位至下料工位释放检测完毕的钢球,等待下一个待检测钢球。
图10是基于正交夹持的钢球表面螺旋全展开机构实物图。钢球展开机构已经成功应用于钢球自动化超声探伤设备中。实践应用表明本文设计的钢球表面全展开机构能够实现球面的全部展开,检测过程中无漏检,检测效率高。

图10 钢球展开机构的实物图Fig.10 The physical map of unfolding mechanism of steel ball
基于正交夹持的钢球表面螺旋全展开机构与其他机构相比具有以下优势。
(1)适用性强。能够适用于多种直径规格的钢球,更换规格时只需更换夹紧块的规格,且安装拆卸方便。
(2)无漏检。其他展开机构均是通过部件之间的摩擦力作用实现球面展开,过程中一旦打滑便会造成漏检。
(3)检测效率高。应用在钢球自动化超声探伤设备中,检测一个钢球只需用时4~6 s;检测不同直径规格的钢球时,可以选择合理的ωz和ωx提高效率,且调节方便。
(4)机构的使用寿命更长,成本更低,易损易耗零件较少,没有复杂加工的零件。
5 结论
(1)本文分析了实现钢球表面全部展开的基本运动条件,即钢球绕直角坐标系中两个正交轴同时作旋转运动。
(2)根据运动学关系建立了钢球表面螺旋全展开的数学模型,并通过坐标变换求解出钢球表面螺旋展开运动轨迹线的方程。
(3)借助MATLAB分析了钢球表面螺旋全展开的过程,研究了影响运动轨迹线密度的因素,得到螺距与螺旋圈数的表达公式。
(4)设计了一种基于正交夹持的钢球表面螺旋全展开机构,且初步应用于钢球自动化超声探伤装备中。
猜你喜欢
中国特种设备安全(2022年1期)2022-04-26
昆钢科技(2021年2期)2021-07-22
哈尔滨轴承(2020年4期)2020-03-17
中学课程辅导·教师通讯(2018年10期)2018-09-04
航空模型(2018年2期)2018-08-07
中国建筑金属结构(2018年4期)2018-05-23
中学生数理化·高一版(2017年3期)2017-07-08
火控雷达技术(2016年1期)2016-02-06
船海工程(2012年4期)2012-01-22
空间控制技术与应用(2009年2期)2009-12-20
