海洋环境对吊放声纳工作深度优化选择分析∗
2019-09-03 06:46:02高青伟
舰船电子工程 2019年8期
吴 芳 吴 铭 高青伟
(海军航空大学 烟台 264001)
1 引言
吊放声纳是反潜直升机的主要搜潜设备,使用频率高,具有主/被动工作模式、可变深搜索、重复使用等特点。由于海洋环境的影响,当吊放声纳水下分机所处深度不同时,对某一深度的目标最大作用距离存在差别。这是因为在实际的海洋环境中,主动探测信号或目标辐射信号的传播受到噪声、混响、传播损失、声速剖面、海底地形等的影响。其中,噪声、混响及传播损失是不可避免的。但是,声速剖面、海底地形及工作深度等对信号传播的影响是不确定的。如果利用这些不确定因素,创造信号传播的有利条件,规避不合理情况,将极大地提高探测性能。吊放声纳在不同的海洋环境下作用距离是不同的,同样地,即使在相同的海洋环境下,采用不同的工作深度也会导致不同的作用距离。本文主要仿真分析了在不同海洋环境条件下吊声使用不同工作深度对应的声纳作用距离,并依据仿真结果给出吊放声纳在不同海洋环境下工作深度的选择方法。
由于海水介质的不均匀性,以及海面和海底分界面的作用,声波在海水中传播时会出现折射、反射现象,使得声波沿曲线路径传播。根据这一特点,可以将声线所经过的地方理解为声纳的作用区域,但其信号能量强度不一定能够发现目标,所以本文从声传播轨迹和能量传播两个方面分析吊放声纳在不同声速剖面类型下其工作深度对作用距离的影响,对不同水文条件下的吊放声纳工作深度给出合理化建议,对吊放声纳装备性能使用进行优化,提高搜潜效能。
2 吊放声纳作用距离数学模型
吊放声纳作用距离的解算主要依据主动声纳方程,即:

当吊放声纳设备一定(即检测阈一定)时,对于在吊放声纳的最大作用距离处返回的信号,检测阈DT应等于吊放声纳的最小可检测信噪比,即:

当方程取等号时,TL是达到最大传播距离时的传播损失值,即FOM(Figure of Merit)值:

优质因素FOM既与吊放声纳的性能有关,又与海洋环境噪声、自噪声和目标强度等参数有关。
从式(3)可知:吊放声纳作用距离计算的实质是尽可能精确地估计优质因素值,即须精确预报或测定TL、SL、NL、DT、DI和TS的值,即:利用射线声学可计算出平面内任一点的传播损失TL;吊放声纳的声源级SL为已知参数;只要给定吊放声纳的工作频率,便可以计算出对应海况下的环境噪声级NL;DT和DI为吊放声纳的具体参数;目标强度TS可以根据目标与吊放声纳相对位置计算得出,最后可通过计算得出的TL值和FOM值,获知吊放声纳各个深度上的最大探测距离。
结合主动声纳方程,下文将分别探讨声源级SL、背景噪声级NL、目标强度TS和传播损失TL的计算模型。
2.1 声源级
对于主动工作方式下的吊放声纳而言,发射声源级

式中P为发射功率,单位为瓦(W)。
2.2 背景噪声级
接收机背景噪声级与声信号频率、海况有关,通常使用以下的经验公式表示:

式中f为声信号频率,单位为kHz;S为海况等级。
2.3 目标强度
潜艇目标强度是随声信号入射方位变化的。图1为潜艇目标反射强度蝶形图,图2为声纳与潜艇的相对位置。潜艇目标强度是潜艇航向角和入射角的夹角(视线角)的函数,即:

目标反射强度TS值根据蝶形曲线方程确定:

式中:TSmax为正横方向目标反射强度;θsi(t)为t时刻的视线角。
s代表吊放声纳,i代表潜艇。如果考虑左右对称性,则视线角从0到±180°,0°时在艇首,180°时在艇尾。一般而言,正横时最大,艇首和艇尾时最小。

图1 潜艇目标反射强度蝶形图
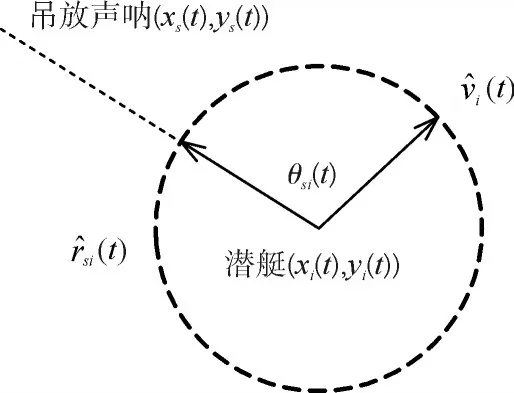
图2 吊放声纳与潜艇的相对位置
设t时刻吊放声纳s坐标为 s:(xs(t),ys(t)),t时刻潜艇i的坐标为 i:(xi(t),yi(t)),γi(t)为t时刻潜艇i的航向角。令rsi(t)为潜艇与吊放声纳之间的距离,vi(t)为t时刻目标i的速度,则cos(θsi(t))=si(t)i(t) ,si(t) 、i(t) 分 别 为 rsi(t)、vi(t)的单位向量。有:


2.4 传播损失
由于声信道在浅海是多途、频散信道,脉冲波在传播过程中其波形将会发生复杂的畸变,对不同频率的信号、在不同的传播距离,其声强的变化有着不同的规律。浅海平均平滑声场中的传播损失可表示为

其中:
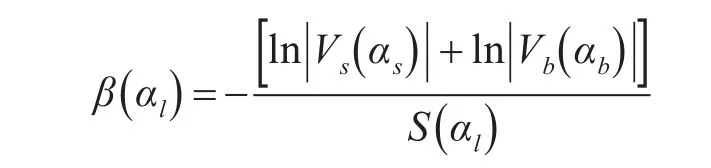
(当本征射线在水层中反转而不触及海面或海底时,则应当去掉Vs和Vb项);
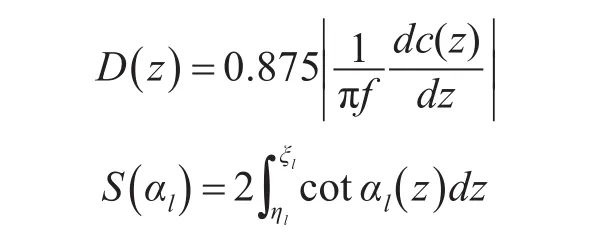
为第l号本征声线的跨度,ηl、ξl分别为本征射线的上、下反转(或反射)界面深度,z1、z2、r分别为声源深度、接收深度和距离,α1、α2、αs、αb分别为本征声线在声源深度、接收深度、海面和海底处的掠角,f为声信号的频率,c(z)为z深度上的声速,Vs、Vb分别为平面波在海面与海底的反射系数。
考虑到声场的深度结构时,为了较好地反映声场的深度结构,可以对简正波振幅函数采用包络平滑。
当声源深度小于接收器深度(即0<z1≤z2<h时),平滑平均声强:
当接收器深度小于声源深度(即0<z2≤z1<h时),平滑平均声强:

此时,传播损失可按其定义计算:

3 吊放声纳作用距离仿真分析
将通过上述计算方法得到的各参数代入式(1)所示的主动声纳方程,就可以得到FOM值,再将此值在上节中计算得到的传播损失数组中进行查询,即可解算出在目标深度上的吊放声纳作用距离。本节仿真分析了不同吊放声纳工作深度对其作用距离的影响。
3.1 不同工作深度对声线覆盖范围的影响
在海深H=250m、发射换能器指向性开角为±10°的情况下,工作深度分别取20m、50m、80m和130m时的声线覆盖情况如图3~图6所示。
由图3~图6可以看出,工作深度位于20m时,声影区较大,且无反转声线存在,第一个声会聚区声线(能量)比较集中,总体来看探测盲区(没有声线的区域)较大;工作深度位于50m时,反转声线将声影区填充掉一部分,由于声源深度位于声速最小值处,初始掠射角较小的那部分声线形成了直达声线,所以在50m深度上始终有较密集的声线,两个明显的声会聚区也以这一深度为中心形成,但是此时150m以下声线能够覆盖的区域已经十分有限,且几乎无法穿透到海深200m以下,对潜航较深的目标无法进行探测;工作深度位于80m时,声影区面积进一步减少,在水平方向3km~5km和离声源较远的7.5km~9km处形成了两个非常明显的声会聚区;工作深度位于130m时,声线几乎每处都可以到达,已不存在探测盲区,正因为如此,声换能器发出的能量也比较分散,即声线比较稀疏,但在声源深度上还是可以较明显地看到分别位于4km和8km的两个声会聚区。

图3 工作深度为20m时的声线图

图4 工作深度为50m时的声线图
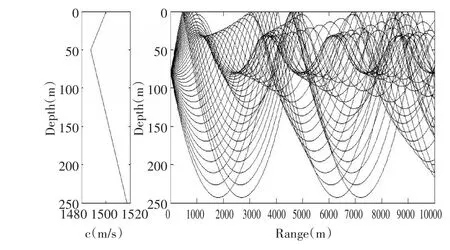
图5 工作深度为80m时的声线图
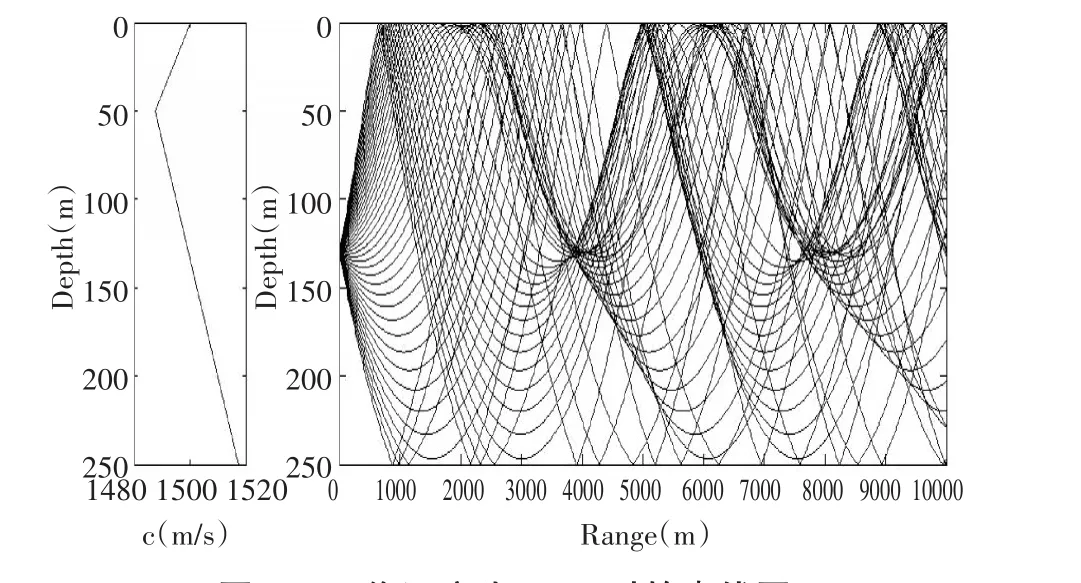
图6 工作深度为130m时的声线图
从以上仿真分析可以看出,在相同的水文条件下,不同的吊声工作深度会对声线覆盖区域产生很大的影响。针对该例中这种类型的声速剖面,当工作深度选在剖面下半段时,工作深度越深,影区面积越小;不论工作深度如何变化,声汇聚区出现的深度都在工作深度附近,水平位置也相差不多,第一汇聚区以4km为中心,第二汇聚区以8km为中心(水平位置的具体值由声速剖面下半段的正梯度绝对值确定)。
3.2 不同工作深度对能量传播的影响
假设海深H=250m、发射换能器指向性开角为±10°、声信号频率为50Hz、接收机深度为0到250m、海面和海底为平面反射(有衰减),工作深度位于20m、50m、80m和130m时的传播损失如图7~图10所示,其中声源处的传播损失为0dB。

图7 工作深度为20m时的传播损失图

图8 工作深度为50m时的传播损失图

图9 工作深度为80m时的传播损失图
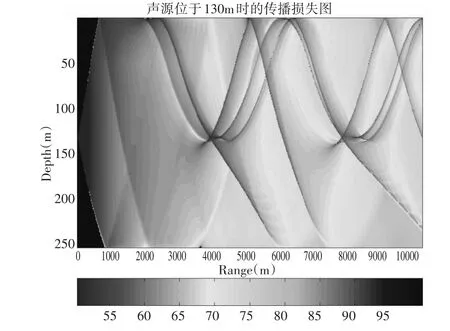
图10 工作深度为130m时的传播损失图
由图7~图10可以看出,工作深度为20m时,海面和海底的反射比较严重,大部分的能量都在界面反射中被消耗掉,而未经反射的声线传播损失较小,仍携有较大的能量,在一定深度范围内能够传播较远;工作深度为50m时,初始掠射角绝对值在0°附近的声线由于向上向下都是声速减小而被限制在声源深度的水平线上,传播损失很小,甚至可以在水平距离已经传播了10公里之后依然将传播损失限制在60dB之内,这种情况非常适用于探测潜航深度在100m以内的目标,因为在这一深度范围内直到水平10km处传播损失一直控制在65dB内,但是由于向海底方向的正声速梯度较大,使得这种情况只能在非常有限的区域探测到位于200m以下的目标;工作深度位于80m时的情况与位于50m时的类似,只是声线反转的厚度加大了,但传播损失依然很小,几个高强度的声会聚区清晰可见,同时由于工作深度更深,可以比上一种情况更好地探测较深的目标,在9.5km以内、150m深度以上的目标几乎都可以70dB以内的传播损失探测到;工作深度位于130m时,声线已经可以覆盖距声源水平距离700m以外各深度的目标,但是此时经海底和海面的反射更加严重,除主要的声会聚区以外,传播损失基本都在67dB以上,但是由于其声线覆盖范围广,可在对可疑海域第一次进行吊放检查时采用这种工作深度。
4 结语
吊放声纳是反潜直升机的主要搜潜设备,使用频率高,具有主/被动工作模式、可变深搜索、重复使用等特点。由于海洋环境的影响,当吊放声纳水下分机所处深度不同时,对某一深度的目标最大作用距离存在差别。本文从声传播轨迹和能量传播两个方面分析吊放声纳在不同声速剖面类型下其工作深度对作用距离的影响,对不同水文条件下的吊放声纳工作深度给出合理化建议,对吊放声纳装备性能使用进行优化,提高搜潜效能。
猜你喜欢
高技术通讯(2022年12期)2022-03-23 07:33:24
声学技术(2020年6期)2021-01-08 08:31:54
考试与评价·八年级版(2020年5期)2020-10-29 05:42:35
装备制造技术(2020年12期)2020-05-22 09:24:54
电子测试(2018年14期)2018-09-26 06:04:12
优雅(2017年3期)2017-03-09 17:02:52
中学生数理化·八年级物理人教版(2016年7期)2016-12-24 09:46:57
沈阳工业大学学报(2016年2期)2016-09-15 02:00:54
火控雷达技术(2016年2期)2016-02-06 02:29:03
航空学报(2015年4期)2015-05-07 06:43:32