
基于自适应雾浓度系数的暗通道先验法能见度测量
2019-09-02 03:28陈钟荣张炎张瑶
现代电子技术 2019年9期
关键词:BP神经网络
陈钟荣 张炎 张瑶

摘 要: 针对传统暗通道先验法处理图像计算能见度时,透射率优化计算复杂以及透射率估测准确性差的问题,提出一种引导滤波的改进方法,以灰度图代替RGB图作为引导图,极大地提高了滤波效率。同时,重点分析雾浓度系数[ω]和图像灰度均值差异对透射率估测准确性的影响,总结出灰度均值的合理范围,提出一种自适应雾浓度系数的新思路。通过构建BP神经网络,以灰度均值及目标区域计算值作为输入,雾浓度系数作为输出,实现了能见度测量系统对于雾浓度系数的自适应修正。将大量图像处理的能见度结果与CJY散射式能见度仪测量结果作比较,二者基本一致,97.1%的相对误差在20%以内,满足能见度测量要求。
关键词: 雾浓度系数; 能见度测量; 暗通道先验法; 引导滤波; BP神经网络; 灰度图
中图分类号: TN911.73?34; P427.2 文献标识码: A 文章编号: 1004?373X(2019)09?0039?07
Visibility measurement using dark channel prior method based on adaptive fog concentration coefficient
CHEN Zhongrong1, 2, ZHANG Yan1, 2, ZHANG Yao1, 2
(1. Key Laboratory for Aerosol?Cloud?Precipitation of China Meteorological Administration, Nanjing 210044, China;
2. School of Atmospheric Physics, Nanjing University of Information Science and Technology, Nanjing 210044, China)
Abstract: The conventional dark channel prior method used to process the image and calculate the visibility has the problems of complicated transmittance optimization calculation and poor transmittance estimation accuracy. Therefore, an improved guided filtering method taking grey?scale map as the guiding picture to replace RGB image is proposed to greatly improve the filtering efficiency. The influence of the difference of fog concentration coefficient [ω] and image gray mean value on the accuracy of transmittance estimation is analyzed emphatically, and the appropriate range of gray mean value is summarized. A new idea of adaptive fog concentration coefficient is proposed. By constructing the BP neural network, the gray mean value and calculated value of the target area are taken as inputs, and the fog concentration coefficient is taken as the output to realize the adaptive correction of the fog concentration coefficient of the visibility measurement system. The visibility results processed by a large number of images are compared with the measured results of CJY scattering visibility meter. The comparison results show that the values of two results are basically the same, and the 97.1% relative error is within 20%, and the method can satisfy the requirements of visibility measurement.
Keywords: fog concentration coefficient; visibility measurement; dark channel prior method; guided filtering; BP neural network; grey?scale map
0 引 言
大气能见度是气象观测的重要指标,对轮渡、民航、高速公路等交通运输及市民日常生活都有重大影响[1]。目前,其测量途径主要分为目测、仪器测量和基于图像的能见度测量。随着生活中的图像采集设备越发常见,以数字图像测量能见度的优势不断突显。相比能见度测量仪器的高昂价格和高架设要求,生活中的数字图像不仅获取途径丰富,且成本也更加低廉。因此,以图像测量能见度的技术有较好的经济优势和发展前景。
国际上,文献[2]提出使用图像的视觉特征测量能见度,但受制于技术水平并未推广应用;文献[3]采用小波变换对图像边缘进行检测,进而估算大气能见度,但适用场景受限;文献[4]提出基于目标物的亮度特征点测量能见度,但需预设目标物,成本高且繁琐。
在国内,文献[5]利用双亮度差法估测日间能见度,但该方法依赖人工标记且对观测条件要求高;文献[6]使用自标定、小波变换等方法,以道路监控视频检测能见度,效果尚佳但测量距离较短,且不适用道路结冰的情况。文献[7]提出暗通道先验理论,并广泛应用于图像去雾领域,而利用该方法可以得到图像每个像素点的透射率,进一步求得每点的消光系数后,即可获得大气能见度信息。
1 测量原理
1.1 能见度测量原理
气象能见度定义为:标准视力眼睛观察水平方向以天空为背景的黑体目标物(视角[0.5°~5°]),能从背景上分辨出目标物轮廓的最大水平距离。设目标物亮度为[IT],背景视亮度为[IB],则视亮度对比([C])可以表示为:[C=IB-ITIB]。世界气象组织采用气象光学视程(MOR)来衡量大气光学状态,定义为白炽灯发出色温为2 700 K的平行光柱,通过大气,亮度减少到初始的0.05时的路径长度。根据朗伯?布格定律:
式中:[F]是经过路径[L]后的光通量;[F0]为[L=0]时的光通量;[σ]为平均消光系数。根据透射率的概念:[T=FF0],则[T=e-σL],令[T=0.05],则光学视程[1]为:
所以,能见度可以通过测量消光系数来计算。
1.2 基于暗通道先验理论的能见度测量
在计算机图形领域中,雾霾图像的物理模型为[8]:
式中:[I(x)]是待去雾图像;[J(x)]是无雾图像;参数[A]是全球大气光成分;[t(x)]为透射率。假定大气光均匀分布,则透射率[t(x)]和大气散射系数[α]满足如下关系:
式中[d(x)]表示目标物到摄像头的距离。
在可见光和红外波段,大气对光的吸收作用可忽略不计,因此可将散射系数近似为消光系数,即[σ≈α]。将式(4)代入式(2)得到能见度与透射率的关系式:
故测量能见度的关键是通过图像处理获得准确的透射率。
透射率计算中,对图像分窗口处理,设窗口小邻域中的透射率[t(x)]为常数[t(x)],[A]在图像中可以解出,对式(3)变换后两边求最小值得:
式中:[Jc]表示图像[J]中RGB三色通道其中的一个;[Ω(x)]是以[x]为中心的局部区域;[y]表示滤波窗口中的像素点。
而暗通道先验原理指在绝大多数非天空的局部区域内,某些像素总会有至少一个颜色通道的灰度值很低。即[Jdark(x)=miny∈Ω(x)[mincJc(y)]=0],代入式(6)就可估测透射率:
在现实生活中,尽管是晴天,空气中依然会含有杂质分子。所以引入一个雾浓度系数[9][ω]([0<ω≤1])。最终,由式(8)求出透射率后代入式(5)即得能见度。
1.3 透射率优化
由于图像一定区域块内的透射率[t(x)]不总是常量,所以上述方式获得的透射率较粗糙,导致透射率图存在块状效应。文献[9?10]先后采用软抠图法和引导滤波法精细化透射率图,获得了不错的效果。本文同样采用引导滤波,但在原有基础上作出改进,在保证滤波效果的前提下,进一步提升了滤波效率。
1.3.1 引导滤波
引导滤波是边缘保留的平滑算子,滤波后透射率[t(x)]与雾霾图像[I(x)]满足线性关系:
1.3.2 滤波改进
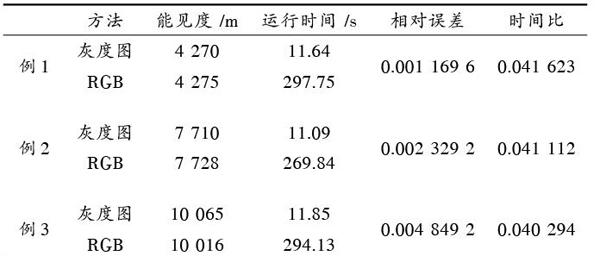
引导滤波时,通常取原雾霾图像为引导图。但以RGB图(三维矩阵)滤波时,运算量远大于基于灰度图(一维矩阵)对透射率处理时的情况。文献[12]预处理压缩图片大小,通过减小数据量提高引导滤波的运算速度。不过,压缩图片减少了有效的像素数量,必然会造成信息量的损失。所以,本文提出一种以灰度图代替RGB图进行滤波的新思路,既保持像素数量,又提高了滤波效率。表1是分别采用灰度图像和彩色RGB图像作为引导图,对不同天气条件下觀测图像进行滤波实验的对比结果。
表1 RGB图滤波及灰度图滤波的误差和时间比较
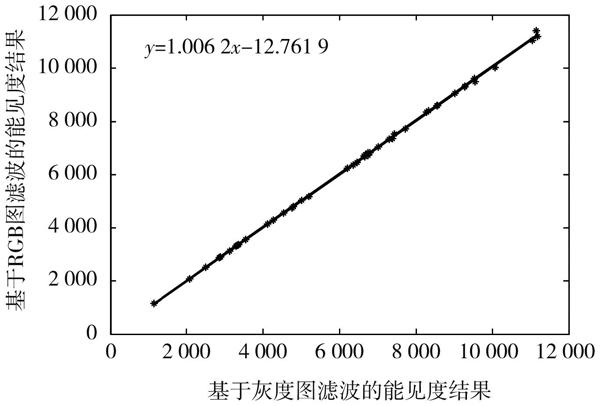
如表1所示,在三种不同能见度下,当基于灰度图滤波时,时间大大缩短,且与基于RGB图滤波的能见度估测结果相对误差极小(小于1%)。后对2018年4月28日—5月3日,每天7:00~18:00的整点观测数据进行统计分析,基于灰度图滤波的结果较RGB滤波结果的平均相对偏差为0.434%,而滤波效率提升95.93%。图1为采用两种滤波方法测量能见度结果的最小二乘法拟合,拟合函数为[y=1.006 2x-12.761 9],二者相关系数[R]接近于1。因此,以灰度图进行引导滤波切实可行,且极大提高了图像处理效率。
图1 两种滤波结果的拟合曲线
2 暗通道法透射率估测影响因素分析
2.1 目标区域选取
由于暗通道理论存在假设前提,适用范围是非天空的绝大多数局部区域,因此,符合理论适用条件目标区域的选取,对透射率的估测准确性影响极大[9]。实验中,目标区域采取人工筛选的方式进行确定。
本实验地点位于南京信息工程大学气象楼10楼,向东侧进行图像采集。前期对观测方向上的各目标物进行详细分析,发现如图2所示的4个区域暗通道的灰度值较低,满足暗通道理论条件。依据文献[9]提出的目标物选取标准对4个区域进行筛选。其中,1区域距离远,在低能见度天气条件下受雾霾影响,与天空的区分度小,测量效果较差。4区域经测发现其观测角度不满足视角0.5°~5°的范围标准[9],对水平能见度的代表性不足。3区域为305 m处的绿色植被,大风天气时,树冠晃动会带来目标区域不稳定,导致能见度测量误差偏大。综上考虑,实验中选取545 m外固定建筑的2区域作为研究对象进行能见度的测量。
图2 观测场景
2.2 雾浓度系数
雾浓度系数[ω]值固定为0.95,但文献[13]研究发现,雾浓度系数的变化对透射率计算影响很大,不同雾化程度的图像计算透射率时[ω]取值不可绝对固定。同样,在测量能见度中,若是不考虑天气条件变化,而仅选取固定的[ω]会出现较大误差。
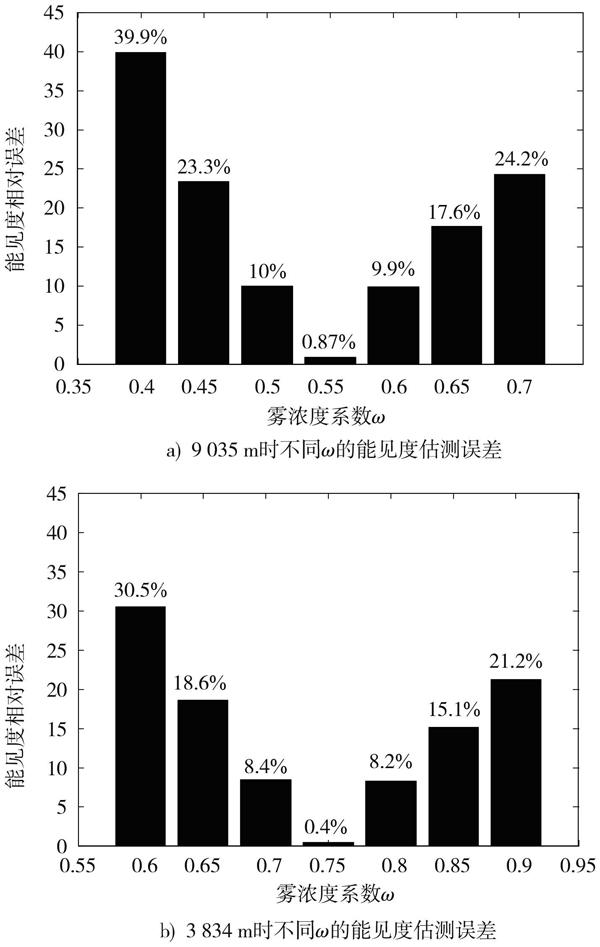
式(13)为式(12)的导函数。由式(13)可发现,当能见度一定时,处理图像获得的计算值[miny∈Ω(x)mincIc(y)Ac]也将固定不变,式(13)可看作关于自变量[ω]和因变量[MOR]的函数关系,则能见度与雾浓度系数满足对数倒数的关系,因此[ω]的小幅变化将引起能见度的大幅计算误差。
以真实能见度9 035 m和3 834 m的图像实验结果为例,其误差分布如图3所示。结果表明,[ω]变化确实对能见度计算结果存在很大影响。而雾浓度系数主要受天气条件变化的影响,在晴朗天气下能见度较好时,[ω]取值偏小;而当空气中颗粒物浓度大,能见度较差时,[ω]的取值应相应扩大。
2.3 图像质量对[ω]的选取影响
2.3.1 图像灰度均值对[ω]的影响
实际图像采样中发现,即使是同一天气条件下,由于不同观测时间下环境光变化以及硬件设备响应速率等多方面噪声因素的综合影响,会造成图像质量差异,这种差异主要表现为图像视觉上的亮度差异(以灰度均值来衡量)。且若雾浓度系数[ω]仅按天气条件选取确定,该差异将引起较大的能见度估计误差。
图3 雾浓度系数变化的能见度误差分布
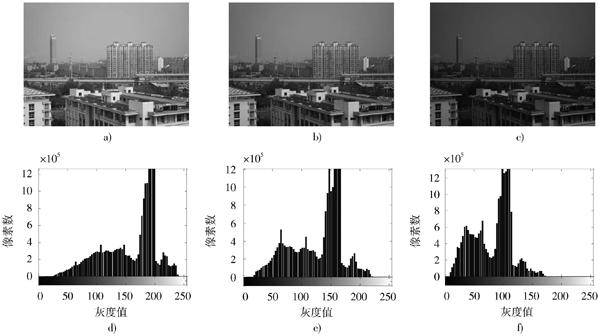
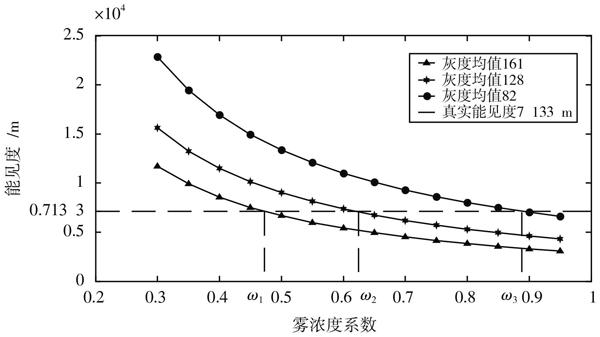
如图4所示,图4a)~图4c)是在1 min内连续拍摄的真实能见度为7 133 m的图像,通过手动调节相机的曝光率模拟实际由环境光等噪声因素引起的图像亮度差异,得到三者的灰度均值分别为161,128和82。图4d)~图4f)为图4a)~图4c)对应的灰度分布直方图。
观察发现,当图像的灰度均值增大时,整张图像的灰度分布会向高一侧拉伸,即各像素的灰度值都将升高,导致[miny∈Ω(x)mincIc(y)Ac]增大,但此时能见度(透射率)是一定的,由式(9)可知,雾浓度系数[ω]需要调整才能准确修正透射率。若控制[ω]为0.3~0.95,以0.05间隔变化,按三种情况分别计算能见度的结果绘制曲线如图5所示。可以发现,为完成透射率修正,得到准确的能见度,随着图像灰度均值增大,选取的雾浓度系数需减小。
图5 不同灰度均值图像能见度估测结果
由上述结果可知,计算透射率时,同一天气条件下,不同灰度均值的图像对应的[ω]不同,而灰度均值范围一定时,不同天气条件的雾浓度系数[ω]对应的规律保持稳定。且天气条件一定时,随灰度均值递减,[ω]取值将递增,二者保持稳定的负相关性。
2.3.2 灰度均值合理范围
实验发现,当灰度均值过小时,若能见度小于3 km,[ω]在定义域内无法完成对透射率的修正;当灰度均值过大时,若能见度大于11 km,能见度的估测误差波动会增大。为保证能见度测量的动态范围较为理想,图像灰度均值存在一定合理范围。
引起该现象的原因是灰度均值变化会导致目标区域计算值[miny∈Ω(x)mincIc(y)Ac]变化。当能见度小时,对应实际透射率应小,由式(8)可知,[ωminy∈Ω(x)mincIc(y)Ac]应该较大,而此时若图像整体灰度均值过小,会导致[miny∈Ω(x)mincIc(y)Ac]自身过小。[ω]取值范围为0~1,无法弥补当前修正需要,使得最终结果表现为[ω]对透射率无法完成修正。
同理,当能见度大时,对应实际透射率大,则[ωminy∈Ω(x)mincIc(y)Ac]应较小,而此时若图像整体灰度均值过大,会导致[miny∈Ω(x)mincIc(y)Ac]自身過大,使得[ω]单位变化引起的透射率变化量增大。而由式(8)的导数是非线性增函数(值域大于0)可知,能见度关于透射率的函数递增速度在自变量取大值时变快。所以,当[miny∈Ω(x)mincIc(y)Ac]过大时,[ω]单位变化引起的能见度变化量更大,最终结果表现为[ω]修正的能见度误差波动剧烈。
综上,不同灰度均值的图像对于能见度测量的敏感响应范围是有限的,理想灰度均值范围应使[ω]既可完成全范围的透射率修正,又不至于让能见度对[ω]的变化过于敏感。因此,经实验统计发现,当图像灰度均值处于80~139时,其对于能见度的估测响应效果较好,是较合理的灰度范围。
3 自适应[ω]的能见度测量系统
鉴于能见度测量中图像灰度均值直接影响[ω]的选取,而不同天气条件下[ω]的取值又决定了所得透射率的准确性。因此,本文提出一种基于BP神经网络的自适应[ω]的能见度测量系统。
3.1 能见度测量系统
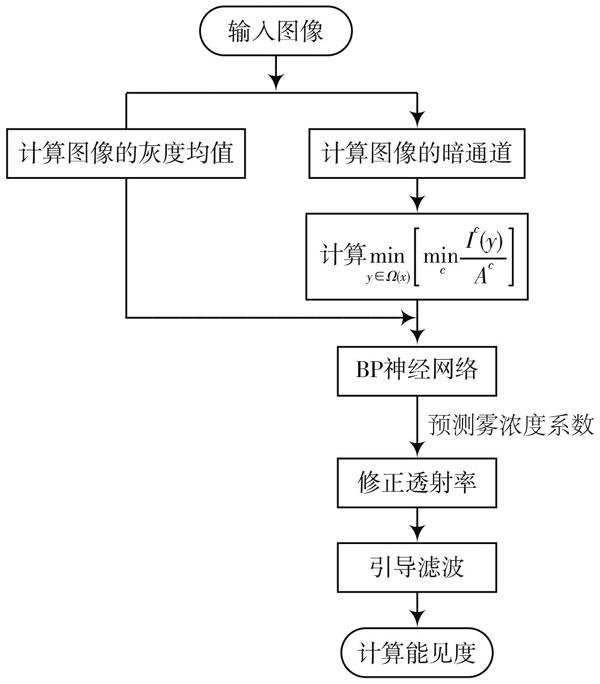
能见度测量系统基本流程如图6所示。首先计算图像的灰度均值及暗通道图像,然后取暗通道图中最亮的前0.1%像素平均值为[A],接着计算目标区域的暗通道与全球大气光成分[A]的比值,以灰度均值和计算值作为输入,经BP神经网络预测输出雾浓度系数,完成透射率求解。最后通过改进的引导滤波优化透射率,即可获得能见度信息。
3.2 BP神经网络
BP神经网络算法是一种有监督的学习算法,即在输入训练样本后,运用反向传播算法对网络的权值和偏差不断调整训练,使得输出结果逼近期望输出。当网络输出层的误差平方达到或小于指定误差时完成训练,保存网络的权值和偏差[14]。
图6 能见度测量流程图
BP神经网絡设计方案和训练样本的选择都会影响最终结果。训练样本过少不足以反映输入量总体信息,过多则会导致网络规模过大及映射关系复杂化。隐层层数由映射函数的连续性决定,连续函数采用单隐层前馈网络,非连续函数用多隐层。隐层节点数要求满足最优化前提,具体根据经验公式推导和尝试得出[m=n+l+a],其中,[m]为隐层节点个数,[n]为输入节点个数,[l]为输出节点个数,[a]为可调用常数(1~10)。
3.3 基于BP神经网络算法的[ω]自适应选取
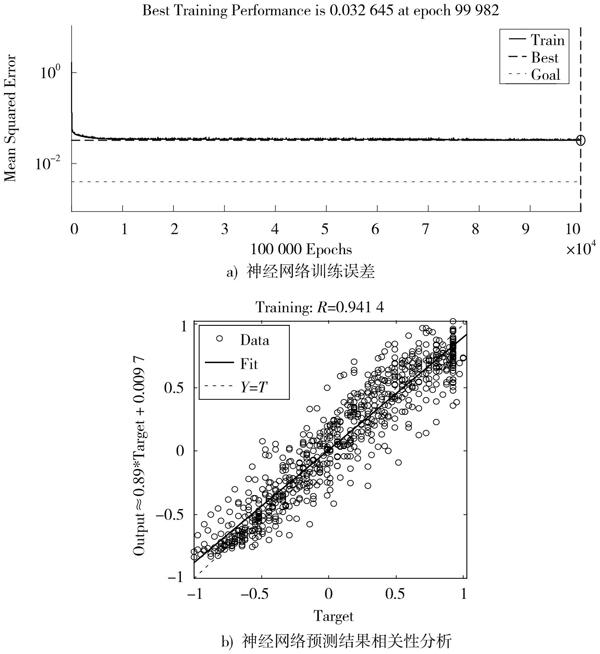
基于以上特性,本文选用经典三层BP神经网络结构,输入层设置两个神经元,分别为图像灰度均值和目标区域计算值[miny∈Ω(x)mincIc(y)Ac],输出层设置一个神经元,为对应灰度均值及天气条件下的雾浓度系数[ω]。隐含层使用Tansig函数,输出层使用Purelin函数。根据经验公式,确定隐含层神经元节点的个数为10。
使用2018年4月18日—5月6日能见度整点观测实验所得的715组数据作为训练样本,该训练集包含不同天气条件下能见度范围为500~16 000 m的情况,具备普遍代表性。图7a)为训练完成网络的误差收敛情况,训练误差为3.24%。图7b)是网络输出结果与期望值的拟合结果,拟合曲线为线性函数,相关系数[R]为0.941 4,接近1,结果表明该神经网络性能较好,满足实验要求。
图7 神经网络训练结果
4 实验结果与分析
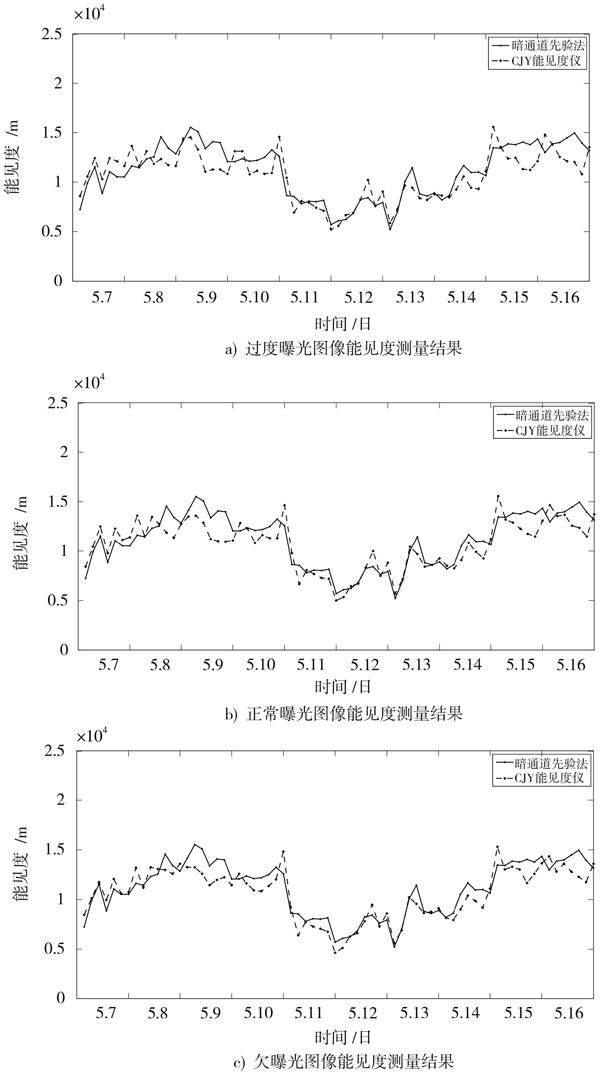
为进一步检验自适应雾浓度系数能见度测量方法的效果。本文自2018年5月7日—5月16日的10天内,对图2场景在不同天气条件下,不同时间段进行能见度观测实验,每日11:00,12:00,14:00,15:00,16:00,17:00和18:00分7个整点观测,共计210组数据。实验设备为索尼WW328261型数码相机,搭载FE28?70 mm变焦镜头,采集图像大小为4 000×6 000 pixel。经前期实验得知,不同时间及天气条件下,当相机自动感光值一定时,所得图像的灰度均值范围稳定不变。因此,拍摄时采用相机的手动曝光M模式,依据其自动感光指示值,在每个整点分别采集感光值为-0.3,0,+0.3的3张不同亮度图像(分别代表欠曝光、正常曝光、过度曝光),模拟实际中由于各种环境噪声因素导致的灰度均值变化的情况。这三种图像灰度均值均满足80~139的合理范围。对三者分别计算能见度,将计算值与安装在南京信息工程大学综合观测培训实习基地的CJY散射式能见度仪测量值进行对比。
图8a)~8c)分别表示高灰度均值图像(过度曝光)、中灰度均值图像(正常曝光)和低灰度均值图像(欠曝光)的能见度测量结果与能见度仪测量结果的对比情况。可以看出,4~16 km能见度范围内,不同天气条件下各灰度均值图像的能见度计算结果和实测数据基本一致。对三种图像的估测结果和实测数据进行最小二乘拟合后,拟合函数为[y=0.81x+1 664],相关系数[R]为0.88,接近于1。其中,仅2.9%的估测相对误差超出20%,但最大误差不超过22.6%,而97.1%的能见度估测相对误差落在20%以内。因此,各灰度均值图像的计算结果与真实能见度基本符合,BP神经网络能够完成不同天气条件和图像灰度均值下对雾浓度系数[ω]的自动修正,获得准确的能见度。据世界气象组织规定,在探测范围内,能见度仪的相对误差小于等于±20%即达标,允许投入使用。而上述利用神经网络自适应修正雾浓度系数的暗通道先验能见度测量方法达到误差标准,满足能见度的测量要求[9]。
图8 不同曝光率图像能见度测量结果
5 结 论
基于暗通道先验原理测量能见度时,本文提出一种引导滤波改进思路和自适应[ω]的能见度测量方法。引导滤波时,以灰度图像作为引导图像,在保证图像透射率优化效果良好的前提下,相较RGB图像引导方式效率更高。测量能见度时,不同天气条件下雾浓度系数[ω]的选择对透射率准确性影响很大,不可取定值。且在同等天气条件下,由于环境噪声等因素引起的图像灰度均值变化也对雾浓度系数选取存在影响,雾浓度系数的确定需同时考虑天气条件和噪声影响。因此,本文采用三层经典结构BP神经网络算法,实现了雾浓度系数的自适应修正,获得了准确的能见计算结果。计算结果较CJY散射能见度仪测量值,97.1%的计算结果相对误差在20%以内,满足能见度的测量要求,仅有2.9%的数据误差超出20%,多出现在极高能见度时,原因可能是前期训练样本中高能见度的样本比重不足,影响网络性能。综上,自适应雾浓度系数的暗通道能见度测量方法操作简单,实施成本小,运用范围广泛,有较好的使用前景。当然,本文研究的目标区域是手动选择,后期的研究重点应关注目标区域的自动选择,并扩大观测周期以增强训练样本的代表性来进一步优化神经网络性能。
参考文献
[1] 苗苗.视频能见度检测算法综述[J].现代电子技术,2012,35(15):72?75.
MIAO Miao. Survey on video?based visibility detection method [J]. Modern electronics technique, 2012, 35(15): 72?75.
[2] STEFFENS C. Measurement of visibility by photographic photometry [J]. Industrial engineering chemistry, 1949, 41(11): 2396?2399.
[3] BUSH C, DEDES C. Wavelet transform for analyzing fog visibility [J]. IEEE intelligent systems, 1998, 13(6): 66?71.
[4] KWON T M. An automatic visibility measurement system based on video cameras [R]. Minnesota: Minnesota Department of Transportation Duluth Office and Office of Research Administration, 1998.
[5] 吕伟涛,陶善昌,刘亦风,等.基于数字摄像技术测量气象能见度:双亮度差方法和试验研究[J].大气科学,2004,28(4):559?570.
L? Weitao, TAO Shanchang, LIU Yifeng, et al. Measuring meteorological visibility based on digital photography: dual differential luminance method and experimental study [J]. Chinese journal of atmospheric science, 2004, 28(4): 559?570.
[6] 陈钊正,陈启美.基于摄像机自标定的视频对比度能见度检测算法与实现[J].电子与信息学报,2010,32(12):2907?2912.
CHEN Zhaozheng, CHEN Qimei. Video contrast visibility detection algorithm and its implementation based on camera self calibration [J]. Journal of electronics & information technology, 2010, 32(12): 2907?2912.
[7] HE K, SUN J, TANG X. Single image haze removal using dark channel prior [J]. IEEE transaction on pattern analysis & machine intelligence, 2011, 34(12): 2341?2353.
[8] 郭艳颖,杨国庆.基于暗原色和加权形态学滤波的图像去雾算法[J].现代电子技术,2012,35(20):71?73.
GUO Yanying, YANG Guoqing. Auto image haze removal algorithm based on dark channel prior and weighted morphological filtering [J]. Modern electronics technique, 2012, 35(20): 71?73.
[9] 赵瑞,胡辽林,赵江涛.基于暗原色先验理论的大气能见度测量[J].激光与光电子学进展,2016,53(6):78?85.
ZHAO Rui, HU Liaolin, ZHAO Jiangtao. Atmospheric visibility measurement based on dark channel prior [J]. Laser & optoelectronics progress, 2016, 53(6): 78?85.
猜你喜欢
商情(2016年43期)2016-12-23
软件导刊(2016年11期)2016-12-22
软件导刊(2016年11期)2016-12-22
电子技术与软件工程(2016年20期)2016-12-21
科技视界(2016年26期)2016-12-17
考试周刊(2016年21期)2016-12-16
现代经济信息(2016年27期)2016-12-16
价值工程(2016年30期)2016-11-24
数字技术与应用(2016年9期)2016-11-09
软件导刊(2016年9期)2016-11-07
