
基于3×3核矩阵的极化码性能分析
2019-09-02 03:28叶铭李晖
现代电子技术 2019年9期
叶铭 李晖
摘 要: 为了更好地分析基于多维核矩阵的极化码的性能,采用基于3×3核矩阵的系统极化编码和非系统极化编码这两种编码方法,做了基于3×3核矩阵的系统极化码和非系统极化码的性能对比实验。仿真结果表明:基于3×3核矩阵的系统极化码和非系统极化码的误帧率性能基本上是一致的;基于3×3核矩阵的系统极化码在误码率性能上相对于非系统极化码有一定幅度的提升。可见,基于3×3核矩阵的系统极化码在性能上比非系统极化码更具优势。
关键词: 多维核矩阵; 极化码; 系统极化码; 非系统极化码; 误帧率仿真; 误码率分析
中图分类号: TN919.3?34 文献标识码: A 文章编号: 1004?373X(2019)09?0011?03
Performance analysis of polar codes based on 3×3 kernel matrix
YE Ming, LI Hui
(School of Information Science and Technology, Hainan University, Haikou 570228, China)
Abstract: In order to analyze the performance of polar codes based on multi?dimensional kernel matrix efficiently, the systematic polar coding method and non?systematic polar coding method based on 3×3 kernel matrix are adopted, and the performance contrast experiments of systematic polar codes (SPCs) and non?systematic polar codes (NSPCs) based on 3×3 kernel matrix are performed. The simulation results demonstrate that the frame error rate (FER) performance of SPCs and NSPCs based on 3×3 kernel matrix is basically consistent, and the bit error rate (BER) performance of SPCs has a certain improvement than that of NSPCs. It is concluded that the performance of SPCs based on 3×3 kernel matrix is superior to that of NSPCs based on 3×3 kernel matrix..
Keywords: multidimensional kernel matrix; polar code; systematic polar code; non?systematic polar code; frame error rate simulation; bit error rate analysis
极化编码是一种可达二进制离散无记忆信道对称容量的编码构造方法[1],标准形式的极化码是非系统极化码。目前主要有两种极化码系统编码的方法,既可保留非系统编码的低复杂度特性,又能显著改善误比特性能[2?3]。仿真结果表明,基于2×2核矩阵的系统极化码与非系统极化码具有相同的误帧率性能,但系统极化码的误比特率性能更好。多维核矩阵构造的极化码的合理性已被证明,这类极化码的构造方法也被提出,极化码的码长更加灵活,码长为[N=2n]形式的限制被打破[4?6]。对于任意二进制输入离散无记忆信道[W]且其对称容量[I(W)]小于任意码率[R],当码长[N]足够大且[β<][12]时,極化编码连续删除(Successive Cancellation,SC)译码下的译码误块率[peN,R=o(2-Nβ)],即2×2核矩阵[G2]有指数[4][12]。当核矩阵足够大时,研究发现该指数可任意逼近1,且越接近1极化码的性能越好[5]。因此,研究基于[l×l]核矩阵[Gl]构造的极化码([l≥3]的核矩阵为多维核矩阵)具有重要意义。本文主要介绍了系统极化码的编码方法和基于3×3核矩阵的极化码。同时,分析基于3×3核矩阵的系统极化码和非系统极化码的性能。
1 基于3×3核矩阵的极化码
1.1 信道极化模型
对于二进制离散无记忆信道[W:x→y],其中,[x={0,1}]表示输入,[y]表示输出,[W(yx)]表示转移概率。[Z(W)]表示信道的可靠性(Bhattacharyya参数):
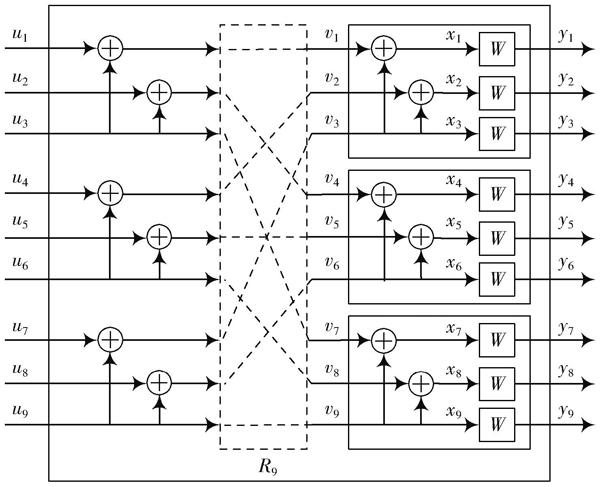
码长为[N=ln(l≥2)]的极化码的合理性已被证明。极化码的主要思想是信道极化,对于信道合并与信道拆分,码长为[N=3n]的极化码与码长[N=2n]的极化码的信道极化相似,其信道合并的模型如图1所示[5,7]。
图1 信道[W9]合并示意
对于基于核矩阵[G2]的极化码,在信道容量相等的情况下将信道[W]近似看成二进制删除信道,信道[W(i)N]的可靠性可由递归公式(3)计算,也可通过密度进化或高斯近似的方法计算[8?9]。
1.2 编码构造
基于2×2核矩阵的极化码只有一种核矩阵,即[G2=1011],而多维核矩阵[Gl]随着[l]的增大拥有更多的形式,码长为[N=ln]的极化码在编码构造上更灵活的同时也更难找出一个更好的核矩阵形式。例如,码长为[N=3n]的极化码的核矩阵[G3]就有24=16种可能形式,不同的[G3]将使构造的极化码具有不同的性能,不同的核矩阵[G3]满足信道极化条件的有[5]:
核矩阵[G3]后的数字如427表示[G3]每行元素对应的十进制数值,在不同的核矩阵[G3]中更好的形式为[G3]427。
2 系统极化码
非系统极化码已被系统地介绍了[1],系统编码的极化码为系统极化码。通过将[u]分成两部分,即[u=(uA,uAc),][A?{1,2,…,N}],用式(5)表示一类码率可调节的码:
[uA=(ui: i∈A)]包含在每一轮传输中可自由变动的用户数据,而[uAc=(ui:i∈Ac)]包含的是在传输开始阶段就已固定并为译码器已知的信息。式(5)可修改为:
式中:[GA]和[GAc]是矩阵[G]的子矩阵,分别包含[A]和[Ac]指定的行。式(6)表示非系统极化码的编码,其中,[uAcGAc]是固定向量;码率[R]可通过改变集合[A]的大小调节。为了将非系统极化码转换成各种可能的系统极化码,令码字[x]分成两部分,即[x=xB+xBc],其中[B]是[{1,2,…,N}]的任意子集,那么式(6)可改写为式(7)和式(8):
式中:[GAB]表示[G]的子矩阵,包含的元素是[(Gi,j),][i∈A,j∈B]。所谓的系统极化码编码就是设法让[xB]发挥和[uA]在非系统编码中携带用户数据一样的作用。对于给定的参数为[(A,uAc)]的非系统极化码编码,若式(6)和式(7)中的集合[uA]和[xB]的数值存在一一对应的关系,则存在参数为[(B,uAc)]的系统极化码编码[2]。相似地,若集合[A]和[B]有相同的元素数目且[GAB]为可逆矩阵,参数为[(A,uAc)]的非系统编码定义的极化码可转换为编码参数为[(B,uAc)]的系统极化码[2]。事实上,通过计算式(7)得:
此外,极化码系统编码的另一种方法是将连续删除(Successive Cancellation,SC)译码器作为编码器[2?3]。具体地,在二进制删除信道上发送码字[x],那么用户数据部分[xA]被完整地接收而其余部分则被删除。
3 性能分析
在加性高斯白噪声信道下对码长为243的极化码进行仿真实验。对于系统极化码和非系统极化码,使用相同的连续删除列表(Successive Cancellation List,SCL)译码器[10?12]。为了逼近极化码的最大似然性能,译码器的列表大小[L]设为32。调制方式为BPSK。对于非系统极化码,译码器产生一个码字源[u]的估计[u]后就停止工作。通过比较[u]和估计[u],对误帧率和误码率统计数据进行编译。对于系统极化码,译码器在产生估计[u]后还要计算[x]的估计[x],并且输出[xA]。误幀率和误码率统计数据通过比较[xA]和估计[xA]进行编译[2]。
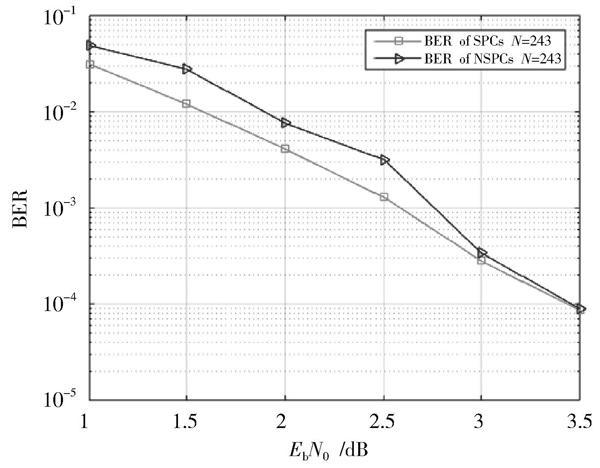
图2给出了基于3×3核矩阵的极化码的误帧率性能曲线。基于3×3核矩阵的系统极化码和非系统极化码的误帧率性能虽然有一些很小的差距,但基本上是一致的。通过观察图3发现,基于3×3核矩阵的系统极化码与基于3×3核矩阵的非系统极化码相比,具有较好的误码率性能。因此,可以认定3×3核矩阵的系统极化码和非系统极化码具有相同的误帧率性能,前者的误码率性能要优于后者。这与基于2×2核矩阵的极化码得出的结论是一样的。其余多维核矩阵构造的系统极化码和非系统极化码的性能尚待研究,基于多维核矩阵的极化码的构造理论和译码算法也是未来研究的主要课题。
图2 基于3×3核矩阵的系统极化码和非系统极化码的误帧率
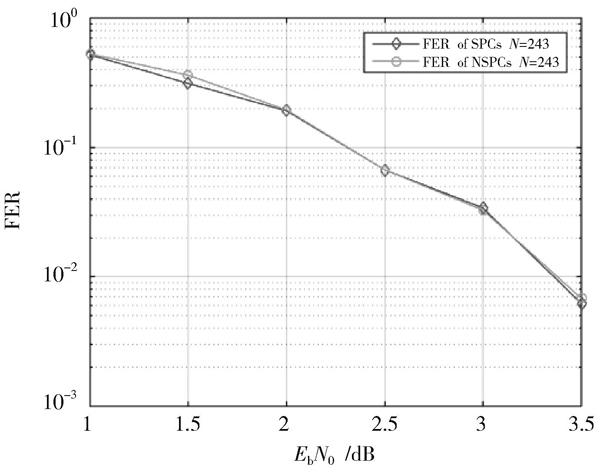
图3 基于3×3核矩阵的系统极化码和非系统极化码的误码率
4 结 论
基于3[×]3核矩阵的极化码的出现,打破了标准形式的极化码在码长上的限制。多维核矩阵构造的极化码的编码构造更加复杂,其码长类型和核矩阵形式也灵活多样。仿真结果表明,与标准形式的极化码一样,基于3×3核矩阵的系统极化码在误码率性能上比非系统极化码更具优势,同时它们具有相同的误帧率性能。
参考文献
[1] TAL I. How to construct polar codes [J]. IEEE transactions on information theory, 2013, 59(10): 6562?6582.
[2] ARIKAN E. Systematic polar codes [J]. IEEE communications letters, 2011, 15(8): 860?862.
[3] LIU Zhenzhen, CHEN Kai, NIU Kai, et al. Distance spectrum analysis of polar codes [C]// 2014 IEEE Wireless Communications and Networking Conference. Istanbul: IEEE, 2014: 490?495.
[4] BENAMMAR M, BIOGLIO V, GABRY F, et al. Multi?kernel polar codes: Proof of polarization and error exponents [C]//Proceedings of 2017 IEEE Information Theory Workshop (ITW). Kaohsiung, Taiwan, China: IEEE, 2017: 101?105.
[5] ZHANG Liang, ZHANG Zhaoyang, WANG Xianbin. Polar code with block?length N=3n [C]// 2012 IEEE International Confe?rence on Wireless Communications Signal Processing. Huangshan, China: IEEE, 2012: 1?6.
[6] KORADA S B, SASOGLU E, URNAKE R. Polar codes: cha?racterization of exponent of exponent, bounds, and construction [J]. IEEE transactions on information theory, 2010, 56(12): 6253?6264.
[7] PRESMAN N, SHAPIRA O, LISYN S. Polar codes with mixed kernels [C]// 2011 IEEE International Symposium on Information Theory. St. Petersburg: IEEE, 2011: 1?16.
[8] TRIFONOV P. Efficient design and decoding of polar codes [J]. IEEE transactions on communications, 2012, 60(11): 3221?3227.
[9] MORI R, TANAKA T. Performance of polar codes with the construction using density evolution [J]. IEEE communications letters, 2010, 13(7): 6253?6264.
[10] CHEN Kai, NIU Kai, LIN Jiaru. Improvement successive cancellation decoding of polar codes [J]. IEEE transactions on communications, 2013, 61(8): 3100?3107.
[11] CHEN Kai, NIU Kai, LIN Jiaru. List successive cancellation decoding of polar codes [J]. Electronics letters, 2012, 48(9): 500?501.
[12] BALATSOUKAS?STIMMING A, BASTANI PARIZI M, BURG A. LLR?based successive cancellation list decoding of polar codes [C]// Proceedings of 2014 IEEE International Confe?rence on Acoustics, Speech and Signal Processing. Florence, Italy: IEEE, 2014: 3903?3907.
