
自动驾驶汽车的轨迹跟踪控制
2019-09-02 08:13:56邵毅明陈亚伟束海波
重庆交通大学学报(自然科学版) 2019年8期
邵毅明,陈亚伟,束海波
(1. 重庆交通大学 交通运输学院,重庆 400074; 2. 重庆交通大学 机电与车辆工程学院,重庆 400074)
轨迹跟踪控制是实现车辆自动驾驶的基础。目前大多数自动驾驶汽车的轨迹跟踪控制算法都是基于假设车辆在低速稳定工况下行驶的情况,没有考虑到高速行驶及地面附着力不足等状况[1-4]。当高速行驶的车辆在紧急转向或低附着路面急速转弯时,轮胎附着力往往达到饱和,侧偏力接近附着极限,容易出现前轴侧滑失去转向能力或者后轴侧滑而甩尾的险情。如果车辆在满足侧偏、滑移等动力学约束情况下,快速准确的沿期望轨迹行驶,则能避免此类险情的发生。
笔者针对现有轨迹跟踪控制器在车速较高时跟踪效果不理想这一问题,以车辆四自由度车辆动力学模型为基础,结合轮胎魔术公式和模型预测理论,考虑轮胎侧偏角对车辆稳定性的影响,设计了线性时变模型预测控制器,并基于该控制器进行了仿真分析。仿真结果表明:该控制器在车速较高时仍能平稳准确地跟踪参考轨迹,具备一定的实际应用价值。
1 车辆动力学及轮胎模型
1.1 车辆动力学模型
在进行轨迹跟踪控制之前,首先要建立车辆的动力学模型。车辆是一个复杂的非线性系统,在保证模型尽可能准确的同时,要对其进行适当简化,故在建立模型之前做如下假设[5-8]:
1)假设车辆没有俯仰和侧倾运动;
2)不考虑悬架垂直运动;
3)忽略空气动力学影响;
4)认为汽车行驶过程中轮胎特性及回正力矩不变。
根据以上假设,笔者将非线性的车辆动力学模型简化为能反映纵向速度、横向速度、横摆角速度及前轮转角的四自由度车辆模型,如图1。
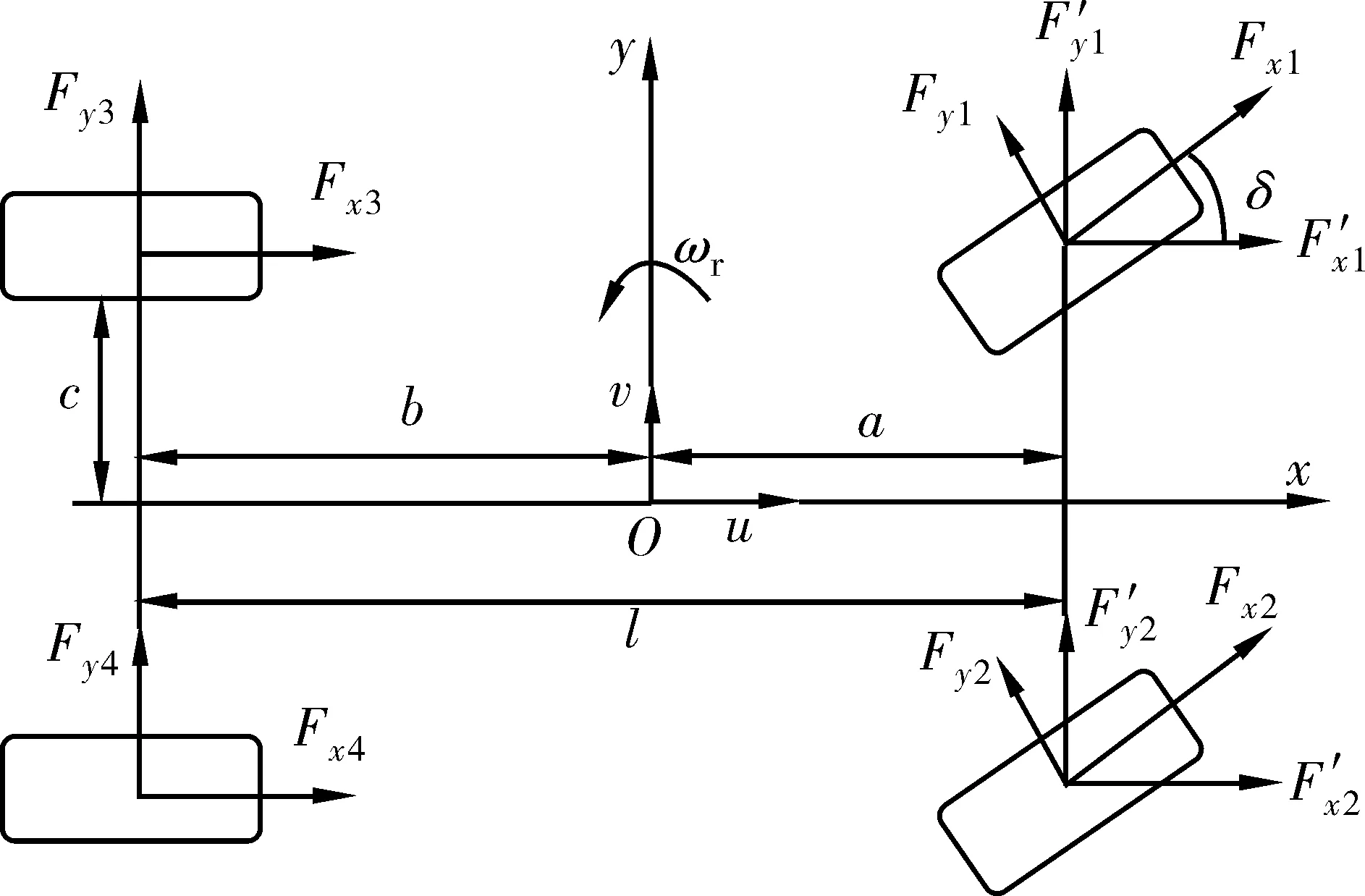
图1 车辆四自由度模型Fig. 1 Vehicle four-degree-of-freedom model
根据牛顿第二定律和力矩平衡公式,可得如下方程:
(1)
(2)
F′x2-Fx3+Fx4)
(3)
惯性坐标系OXYZ中质心平面运动方程为:

(4)

(5)
在车辆坐标系中沿x轴和y轴轮胎受到的纵向力Fxi和横向力Fyi,它们与轮胎侧偏力Fci及轮胎纵向力Fli之间存在一定关系,其关系式为
Fxi=Flicosδ-Fcisinδ
(6)
Fyi=Flisinδ+Fcicosδ
(6)
由于轮胎侧偏力Fci和轮胎纵向力Fli与轮胎侧偏角αi、垂直载荷Fzi、路面摩擦系数ui、滑移率κi有关,可由多参数的函数表示:
Fli=fl(αi,κi,ui,Fzi)
(8)
Fci=fc(αi,κi,ui,Fzi)
(9)
结合式(1)~(9),即可得车辆非线性动力学模型,其模型由如下微分方程表示为:
(10)

1.2 轮胎模型
地面产生的作用力通过轮胎施加到车辆上,轮胎的力学特性与车辆的操纵稳定性有密切联系,因此建立一个精准的轮胎模型对研究车辆动力学特性十分必要[9]。
轮胎的侧偏特性对车辆操纵稳定性及转向有相当大的影响。在某些极限工况下,如车辆进行高速转弯或行驶在低附着系数路面时,由于地面无法提供轮胎所需的附着力,车辆操作稳定性会变差甚至出现危险工况,为了保证车辆的稳定性,必须研究轮胎力学模型。
轮胎结构较为复杂且具有非线性特征,故笔者引入魔术公式轮胎模型。该模型通过组合三角函数公式对实验数据进行拟合,只用一套公式就能反映轮胎的横向力、纵向力、滑移特性和侧偏特性[10-13],如式(11)。
Y=Dsin{Carctan[Bx-E(Bx-arctanBx)]}+Sv
(11)
式中:Y为轮胎侧偏力或者纵向力;B为刚度因子;C是曲线形状因子;Sv为曲线垂直方向漂移;D为峰值因子;x=(κ+Sh)或x=(α+Sh),Sh为曲线水平方向上的漂移。
因为Carsim也是采用魔术公式构建轮胎模型,由其中的轮胎力数据可得轮胎侧偏特性,如图2。
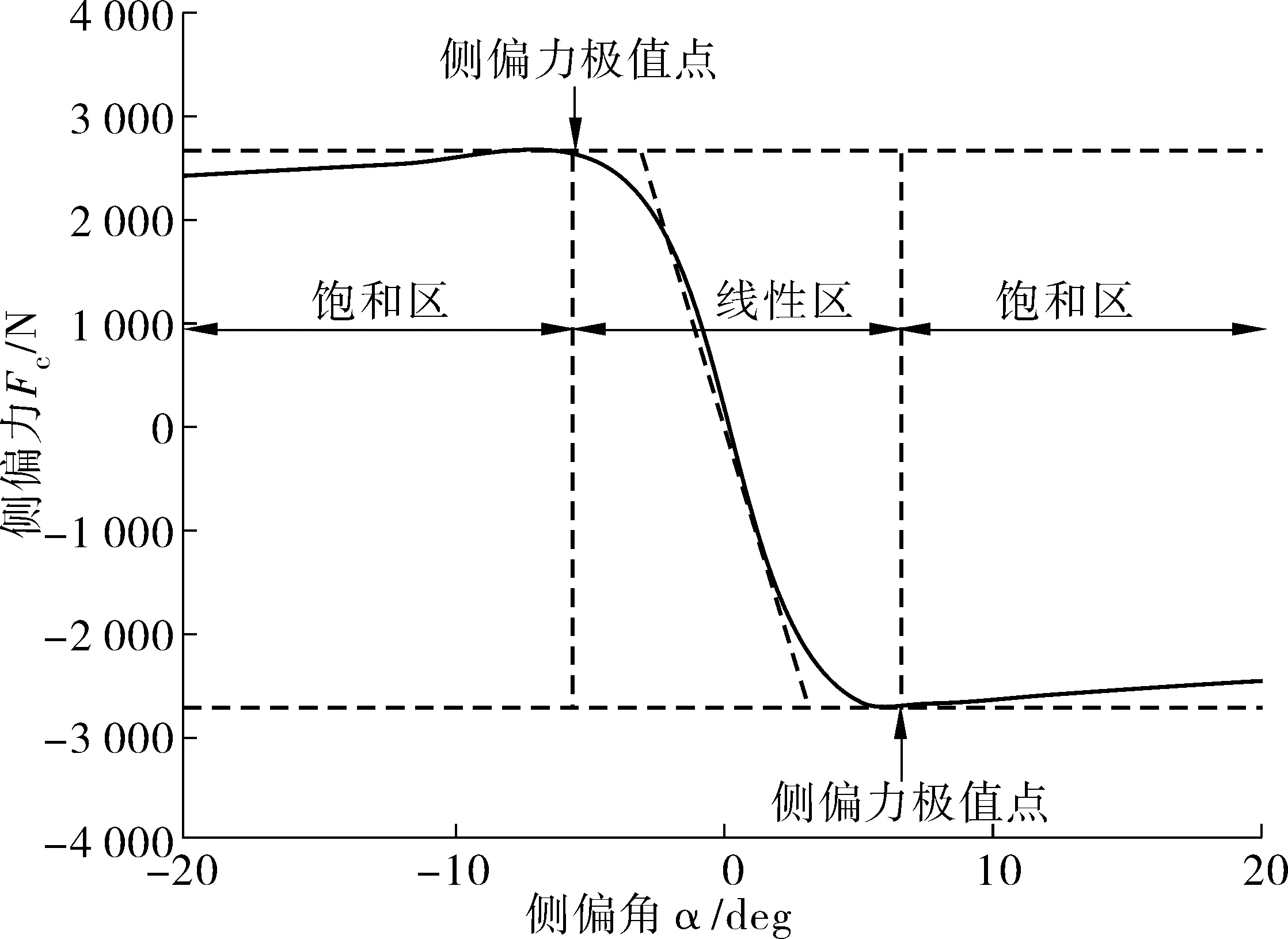
图2 轮胎的侧偏特性Fig. 2 Lateral deviation of the tire
由图2可见:随着侧偏角不断变大,侧偏力也逐渐增大,最后达到极限值,此后侧偏角继续增大时,侧偏力不会增加,而是有所减小。为确保车辆的稳定性,应使侧偏角在线性区内,防止车辆侧滑。
2 线性时变MPC控制器设计
2.1 建立预测模型
模型预测控制(MPC)具有滚动的优化策略,因而对系统的动态控制有着良好效果。同时,MPC可对输出量进行反馈校正,减小输出误差,提高系统控制鲁棒性[14]。
模型预测控制(MPC)一般分为3个步骤:首先根据预测模型预测车辆状态;然后根据系统当前状态及预测模型在采样周期内按照控制时域的跟踪目标,在输入允许范围内计算预测输入,并优化目标函数;最后,将优化问题的第一个元素作用于系统上[15-17]。
车辆的非线性动力学模型微分方程如式(12):

(12)
t时刻将式(12)在点[ξ(t),μ(t-1)]处线性化,可得如下线性时变系统如式(13):

(13)

将式(12)进行离散化处理,得到离散线性时变系统为:
ξk+1=Ak,tξk,t+Bk,tμk,t+dk,t
(14)
(15)
(16)
(17)
(18)
At,t=I+TAt,Bt,t=TBt
(19)
根据以上线性化过程,式(12)所描述的车辆非线性模型可化为如下离散模型:
ξ(k+1)=f[ξ(k),μ(k)]
(20)
u(k)=μ(k-1)+Δμ(k)
(21)

2.2 目标函数和约束条件设计
设置目标函数为:
(22)

2.3 求解目标函数
在t时刻,车辆当前状态量为ξ(t)和μ(t-1),求解下列优化问题:

(23)
为便于计算机编程求解,可将其转化为如下的标准二次型形式:
(24)
s.t.
(25)
式中:ΔUmin和ΔUmax分别为控制增量的最小值和最大值。
在控制周期内对上述优化问题进行求解,得到最优解序列:
(26)
将最优控制增量序列的第一个控制增量作用于系统,即:
(27)
在每个周期内反复循环该过程,即可实现轨迹跟踪控制。
3 仿真分析
为验证控制器的效果,笔者在20 m/s的速度下分别使用最优预瞄控制和MPC控制器对双移线工况进行仿真。通过对比车辆在行驶过程中的某些参数,可知道两种控制器的轨迹跟踪性能的优劣。
3.1 最优预瞄跟踪控制仿真
图3为实际位置与参考路径对比结果。由图3可知:在车速为20 m/s时,最优预瞄控制跟踪双移线路径在79 m以后出现了严重的偏移,说明在此车速下轨迹跟踪控制不理想。
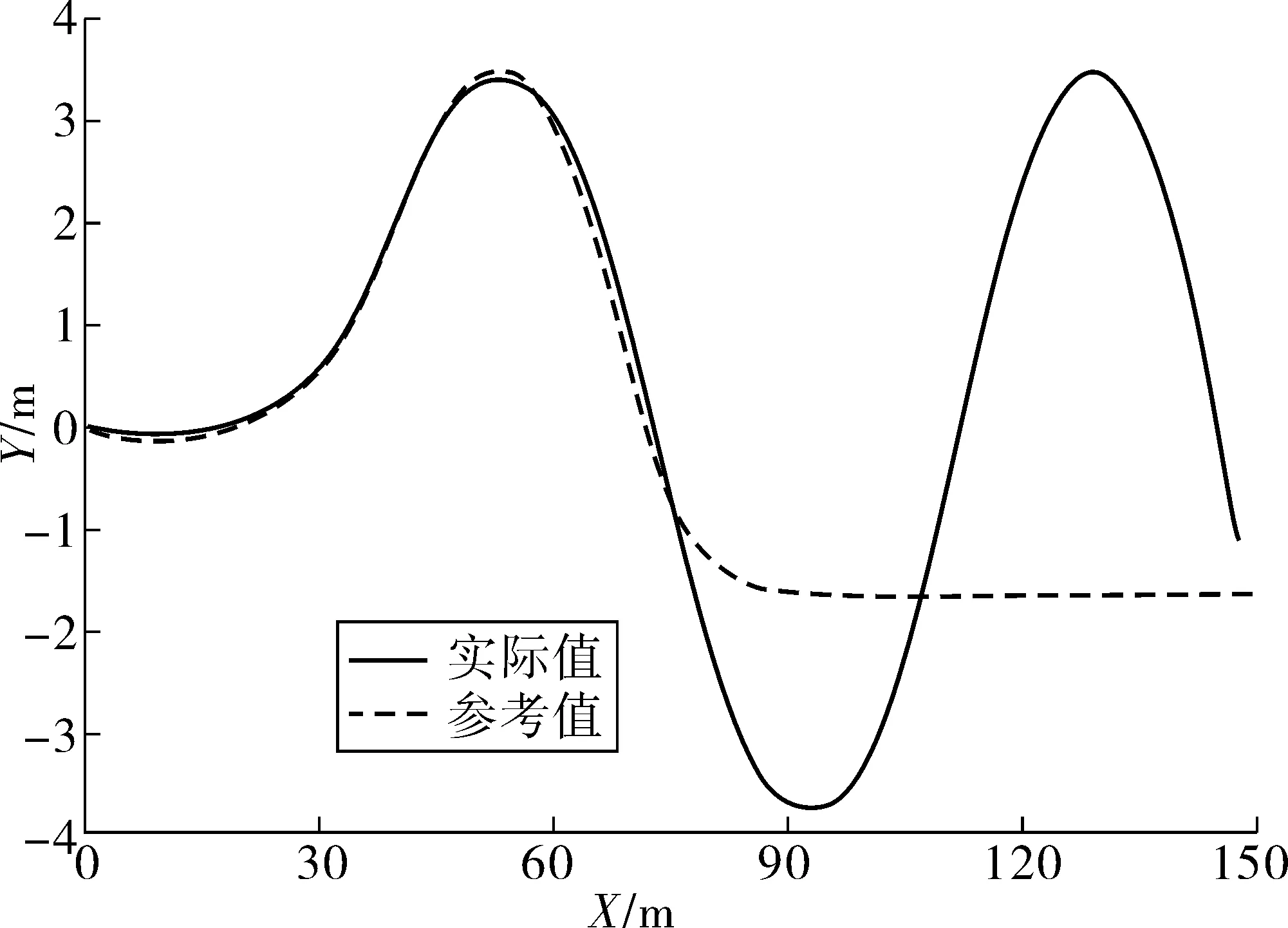
图3 实际位置与参考路径对比Fig. 3 Comparison of actual position and reference trajectory
图4为前轮转角δ随时间变化趋势。由图4可知:5 s以后前轮转角急速变化,仅仅靠前轮转动已经无法实现轨迹跟踪控制。
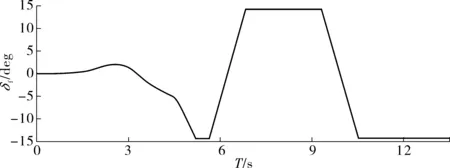
图4 前轮转角δ随时间变化Fig. 4 Variation of front wheel angle changing with time

图5 车辆横摆角速度变化Fig. 5 Variation of vehicle yaw angular velocity
图6为轮胎侧偏角α随时间变化的情况。由图6可知:轮胎侧偏角变化范围超过10 deg。表1为最优预瞄跟踪器的输出值跟踪误差。由表1可知:轨迹跟踪误差数值较大。
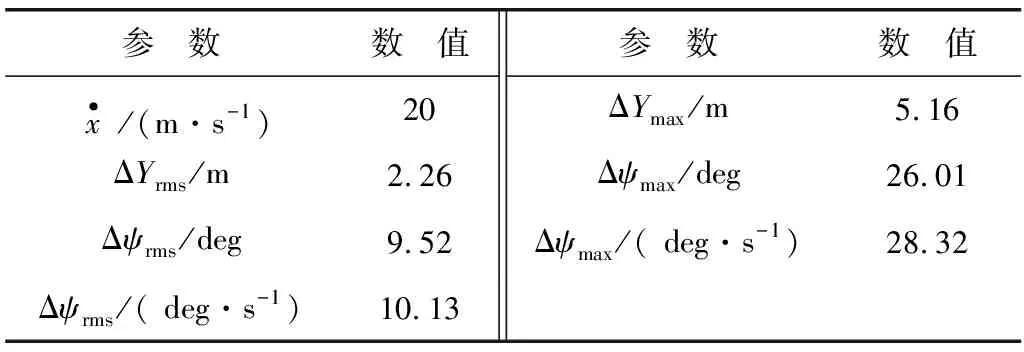
参 数数 值参 数数 值x·/(m·s-1)20ΔYmax/m5.16ΔYrms/m2.26Δψmax/deg26.01Δψrms/deg9.52Δψmax/( deg·s-1)28.32Δψrms/( deg·s-1)10.13
综上所述,在车速为20 m/s时,最优预瞄跟踪控制跟踪双移线工况,轨迹跟踪能力较差,不能很好地沿着期望路径行驶。
3.2 线性时变MPC控制器仿真
图7为实际位置与参考轨迹的比较情况。由图7可知:由于车速的增加使得车辆实际位置与参考轨迹之间出现了一定偏差,但与预瞄跟踪控制器相比(图3),线性时变MPC控制器没有出现严重偏移,仍能较好地完成轨迹跟踪控制任务。
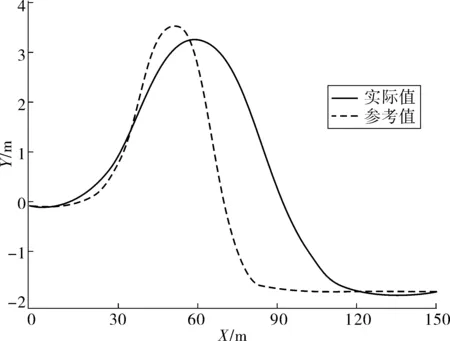
图7 实际位置与参考轨迹对比Fig. 7 Comparison of actual position and reference trajectory
图8为轮胎侧偏角随时间的变化情况。由图8可知:轮胎侧偏角的变化较小,最大轮胎侧偏角的数值不超过3 deg,表明线性时变MPC控制器对轮胎侧偏角进行了限制,使其在一个小范围内波动。

图8 前轮转角δ随时间变化Fig. 8 Variation of front wheel angle changing with time
图9为车辆横摆角速度的变化。由图9可知:虽然实际横摆角速度与参考值有一定偏差,但与最优预瞄控制相比,线性时变MPC控制器跟踪双移线工况时,误差相对较小,整体上的控制效果较好。
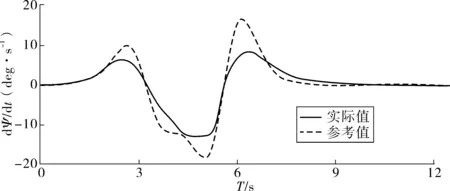
图9 车辆横摆角速度变化Fig. 9 Variation of vehicle yaw angular velocity
图10为轮胎侧偏角随时间的变化情况。由图10可知:在侧偏角软约束限制下,轮胎侧偏角保持在±3 deg内,使得轮胎侧偏角一直处于线性区内,保证了车辆的稳定性。
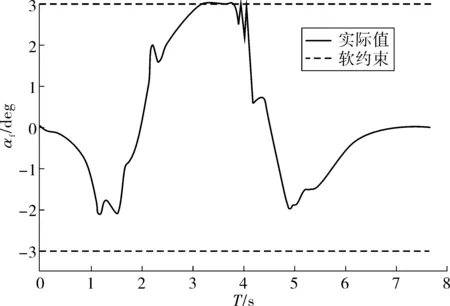
图10 轮胎侧偏角α随时间变化Fig. 10 Variation of tire sideslip angle changing with time
表2为MPC控制器的输出量跟踪误差。
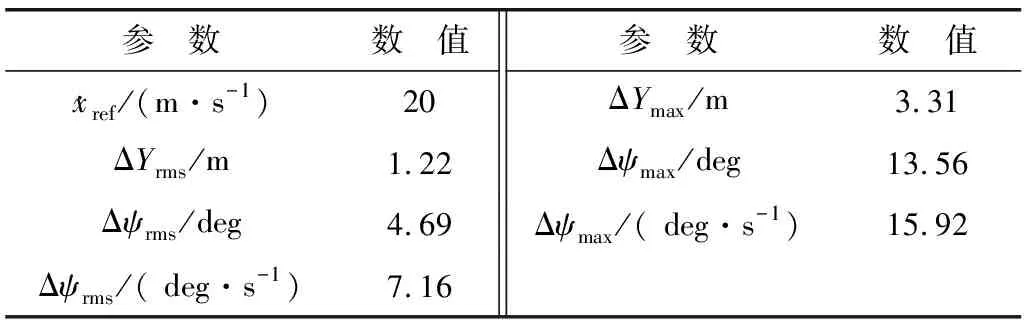
表2 MPC控制器的输出量跟踪误差Table 2 Output value tracking error of MPC controller
综上所述,与最优预瞄控制方法相比,带有侧偏角软约束的线性时变MPC控制器在跟踪参考轨迹方面有更好的表现,而且对车速变化、路面附着条件和参考轨迹具有良好的适应性。
4 结 语
笔者建立了车辆四自由度非线性动力学模型,然后基于该模型设计了线性时变MPC轨迹跟踪控制器,最后在搭建的Simulink/Carsim平台上对设计的控制器进行仿真验证。仿真结果表明:笔者设计的带有侧偏角软约束的线性时变MPC控制器能保证轮胎侧偏角处于线性区,从而防止车辆在转弯时因前轴侧滑而失去轨迹跟踪能力或者因后轴侧滑而出现甩尾等危险工况。对比两种控制器的跟踪能力,线性时变MPC控制器的控制能力明显优于最优预瞄控制器,而且对车速变化具有良好的适应性,能在保证车辆稳定性的前提下实现轨迹跟踪。
猜你喜欢
民用飞机设计与研究(2020年4期)2021-01-21 09:15:46
新课程·中学(2019年7期)2019-09-17 13:41:15
童话世界(2019年14期)2019-06-25 10:11:52
幼儿教育·父母孩子版(2017年12期)2018-02-28 16:33:59
物理教学探讨(2018年1期)2018-02-13 09:26:52
智富时代(2017年4期)2017-04-27 17:08:47
广东石油化工学院学报(2016年6期)2016-05-17 05:17:43
橡胶工业(2015年4期)2015-07-29 09:17:24
橡胶工业(2015年4期)2015-07-29 09:17:02
中国铁道科学(2015年4期)2015-06-21 06:46:08
