
一种高精度秒脉冲产生方法
2019-08-28 09:52栾超,孙峰,陈杰,赵娜
导航定位学报 2019年3期
栾 超,孙 峰,陈 杰,赵 娜
一种高精度秒脉冲产生方法
栾 超,孙 峰,陈 杰,赵 娜
(和芯星通科技(北京)有限公司,北京 100094)
针对目前全球定位系统接收机输出的秒脉冲精度较低,并且随着时间的推移会有阶段性偏差,整体授时性能只在百纳秒量级的问题,提出一种基于全系统多频点接收机频率预补偿修正秒脉冲输出的方法:采用接收机观测值噪声间接分析全系统多频点接收机的误差成分,确定接收机晶振的误差项和秒稳性能;分析影响秒脉冲精度的主要因素;最后在全系统多频点接收机上进行实验验证。结果表明,该方法能长时间稳定地输出秒脉冲,整体性能可达到24 h峰峰值小于11 ns,1倍标准差(1)小于2 ns。
接收机钟差;高精度授时;全球定位系统
0 引言
全球卫星导航系统(global navigation satellite system, GNSS)可为地球表面和近地空间的用户提供全天时、大范围、长期连续实时高精度的定位、测速和授时服务。用于输出授时秒脉冲(pulse per second, PPS)的GNSS接收机正是使用GNSS卫星信号进行位置、速度和时间解算,再通过滤波拟合等方法调整本地的秒脉冲相位,从而精确输出秒脉冲信号。
目前用于输出秒脉冲的GNSS接收机广泛应用于通信基站、时间基准站以及电力系统等行业。在电力系统中,电网的故障检测及分析要求时间精度达到毫秒级,其电力相位对时间精度的要求达到微秒级。在4G网络通信系统中,对GNSS接收机输出秒脉冲的精度要求为1.5 ns。这样的精度要求目前的主流授时型GNSS接收机,如UBlox M8T(1σ为20 ns),Trimble Mini-T(1为15 ns)等都可以满足。但是在未来5G移动基站的布局中,目前要求GNSS接收机的秒脉冲输出精度峰峰值小于30 ns,显然目前市场上的主流GNSS接收机的秒脉冲输出精度是不满足要求的。
并且目前主流用于授时的GNSS接收机受制于芯片集成度等原因都是单系统单频点或者双系统单频点。这样的系统配置带来的问题有2点:①单频接收机易受电离层扰动的影响,电离层扰动较为活跃的时候PPS会有15~30 ns的不确定度;②双系统特别是单系统接收机,在其使用的GNSS系统信号受到干扰或者由于政策、战争等原因某些系统关闭了其指定区域的GNSS信号时,在这些受干扰或者被关闭系统服务的区域,GNSS接收机就不能正确运行。
为了解决上述精度、系统频率受限的问题,本文根据各系统信号以及所使用的低成本温补晶振的特点,提出一种基于全系统多频点GNSS接收机的频率预补偿方法来实时修正接收机秒脉冲相位,从而达到提高授时脉冲精度的目的。并且全系统多频点接收机能够最大限度地将个别系统受干扰或者信号关闭带来的恶化影响降低到最低。
1 全系统多频点接收机授时原理
以全球定位系统(global positioning system, GPS)为例,卫星不间断地播发其自身的射频信号,其中包含载波和伪码信息;并且不间断地播发自身的星历参数、星钟参数等导航电文信息。用户接收机在接收到这些信号以及导航电文后通过解算会得到接收机的位置速度以及时间信息。当接收机正确解算出时间信息后,结合GNSS系统时以及本地的钟差信息共同维护本地的PPS时,补偿诸如天线、射频以及处理时延后将PPS时间对准到指定的GNSS系统时,这里即为GPS时;最后将拟合好的PPS时间驱动PPS脉冲输出,即为PPS授时脉冲。授时接收机原理如图1所示。
由图1可知GNSS系统信号经由GNSS天线接收至前端的前置放大器,在经过下变频、模数转换器(analog to digital converter, ADC)信号采集后转换为数字中频信号,经由GNSS接收机基带处理通道进行捕获跟踪,经由基带中的环路对本地复制的伪码和载波进行调整从而提高观测值精度,再将产生的观测值以及导航电文送入定位测速定时(position, velocity, time, PVT)模块进行计算,从而得到本地接收机钟差进而调整出精确的PPS脉冲信号。
2 影响接收机PPS输出准确度及精度的因素分析
2.1 天线及线缆时延对授时精度的影响
信号由天线相位中心经射频线缆至接收机的ADC进行采样。这一射频链路存在着固定的射频时延,此射频时延由天线的群时延、射频线缆的传输时延等共同决定;但此时延在使用的天线以及线缆型号和线缆长度确定后是一个固定值,反映到授时精度上则是PPS的固定偏差,而授时型接收机则可以通过写入固定的授时时延对此偏差进行补偿:所以此天线及线缆的时延对运行过程中的授时脉冲不会带来精度上的影响。
2.2 硬件处理抖动对授时精度的影响
对于授时型的GNSS接收机,授时脉冲的精度受硬件的影响较大,包括前端放大器、下变频器、ADC等器件的影响,以及本地晶振抖动的影响。对于所有影响授时精度的噪声可以使用接收机的伪距噪声来衡量。
伪距测量值为

从式(1)中可以看出,接收机伪距测量值除了与卫星和接收机之间的几何距离有关,还与接收机钟差值、卫星钟差值、电离层、对流层以及接收机伪距测量噪声等有关。为了使用伪距测量值衡量出伪距噪声,就须去除其他项的影响。



双差测量值是2台接收机在同一时刻内对2颗卫星的测量值(如图2所示)。即在站间单差的基础上再求一次星间的差分。

图2 双差示意


图3为接入同一个天线的2个GNSS接收机零基线24 h内GPS所有可见卫星的3个频点(L1,L2,L5)伪距噪声非差统计值。从图3中可以看出,对于使用双频点(L1、L2)进行解算的接收机,L1频点的伪距噪声统计值为0.041 m,L2频点的伪距噪声为0.126 m 。图4为24 h内的时间精度因子(time dilution of precision, TDOP),其值每变化一次打印一个点。考虑对时间误差的影响时,以其最大值1.062 4估算对接收机的影响。由文献[2-4]可知在使用双频进行定位和授时的情况下,双频校正后的伪距测量值为


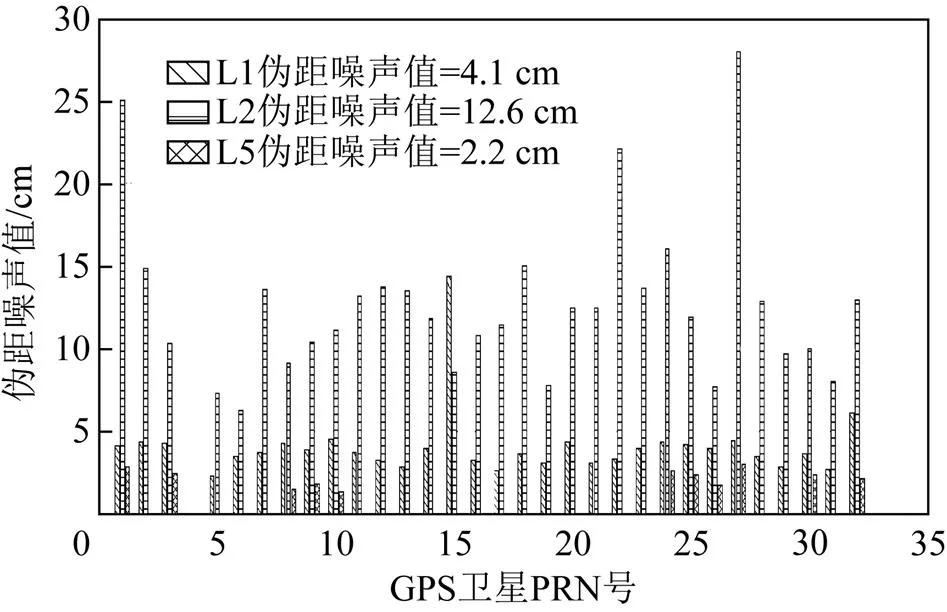
图3 GPS24h内所有可见卫星的3个频点伪距噪声值

图4 24h内接收机TDOP值
2.3 PPS计算环路的影响
影响PPS时间精度的因素有观测值质量、定位精度、晶振频率抖动和漂移的影响。而无论是上述哪种影响带来的PPS秒的抖动,在算法上都可以对PPS秒时间使用环路滤波进行消减。
由于晶振在工作过程中温度变化等外界因素会导致其频率不断地变化,并且变化量随着温度及频率变化量调整,因而存在2阶量以及微小的3阶量;所以在使用环路对钟差输入量进行滤波调整时使用如图5所示的3阶环路滤波器。

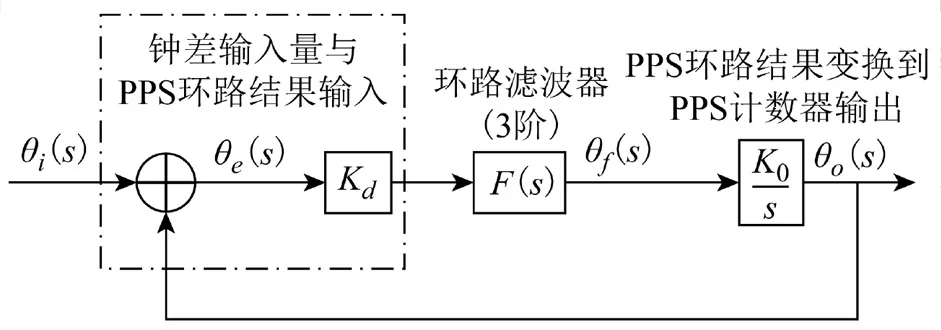
图5 PPS计算环路框图
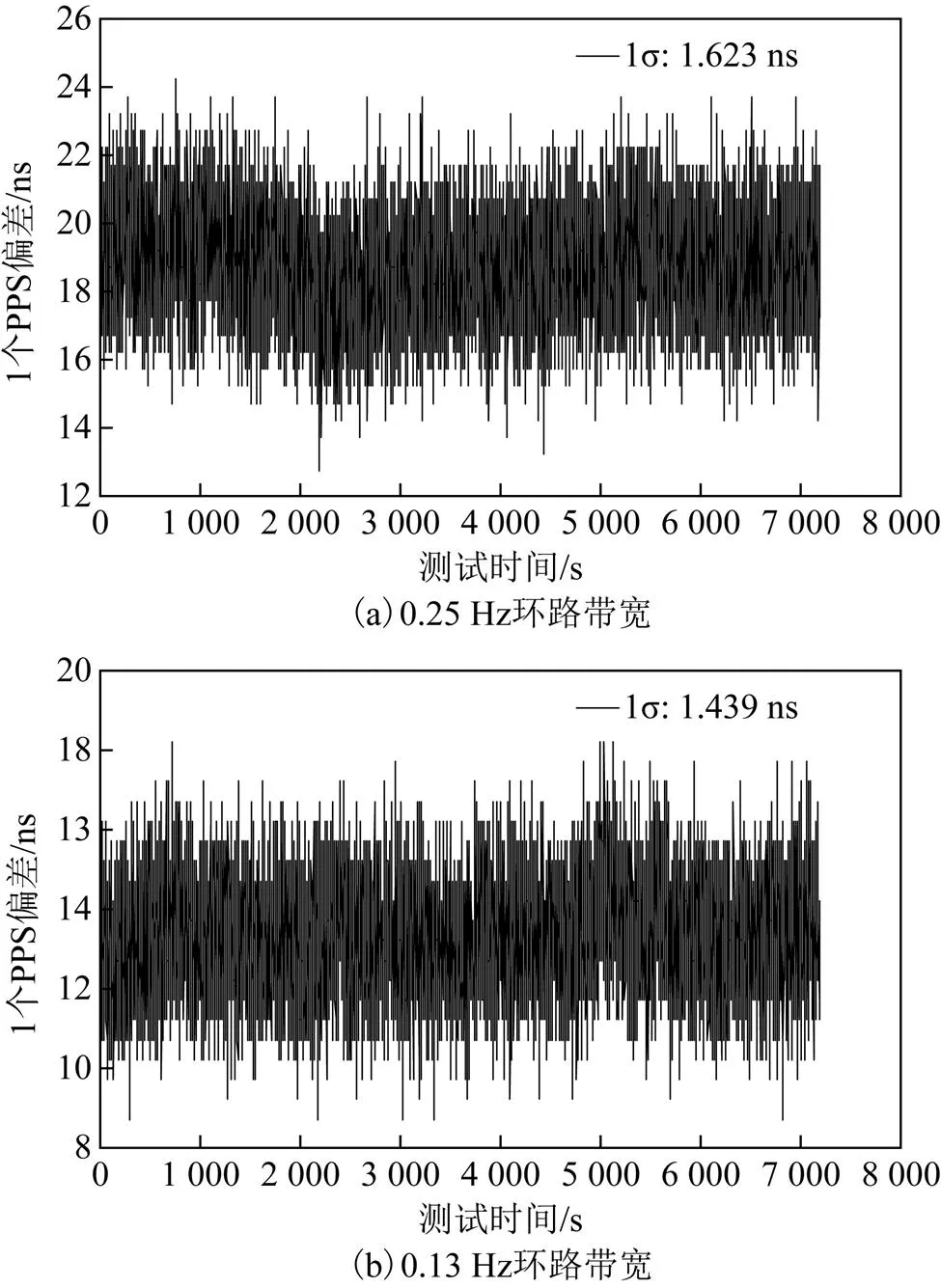
图6 PPS三阶环路PPS结果
2.4 PVT钟差计算对授时精度的影响
由伪距观测方程式(1)可知,伪距观测值除了与卫星到接收机的真实距离以及卫星和接收机的钟差、观测噪声有关外,还受电离层延时和对流层延时的影响。

3 高精度PPS同步改进方法及实验验证





本文基于此,对使用PVT计算得到的钟差及钟飘值进行预拟合补偿,并使用预补偿钟差结果对驱动PPS脉冲输出的计数器频率进行预补偿从而得到较为精确的PPS时间秒时刻。在整体计算中,对使用的GNSS系统的钟差参数直接使用,对本地计算得到的接收机钟差进行平滑滤波后送入PPS模块,并对平滑后的本地时钟钟飘值对计算的结果进行修正,从而得到下一秒的秒时刻。
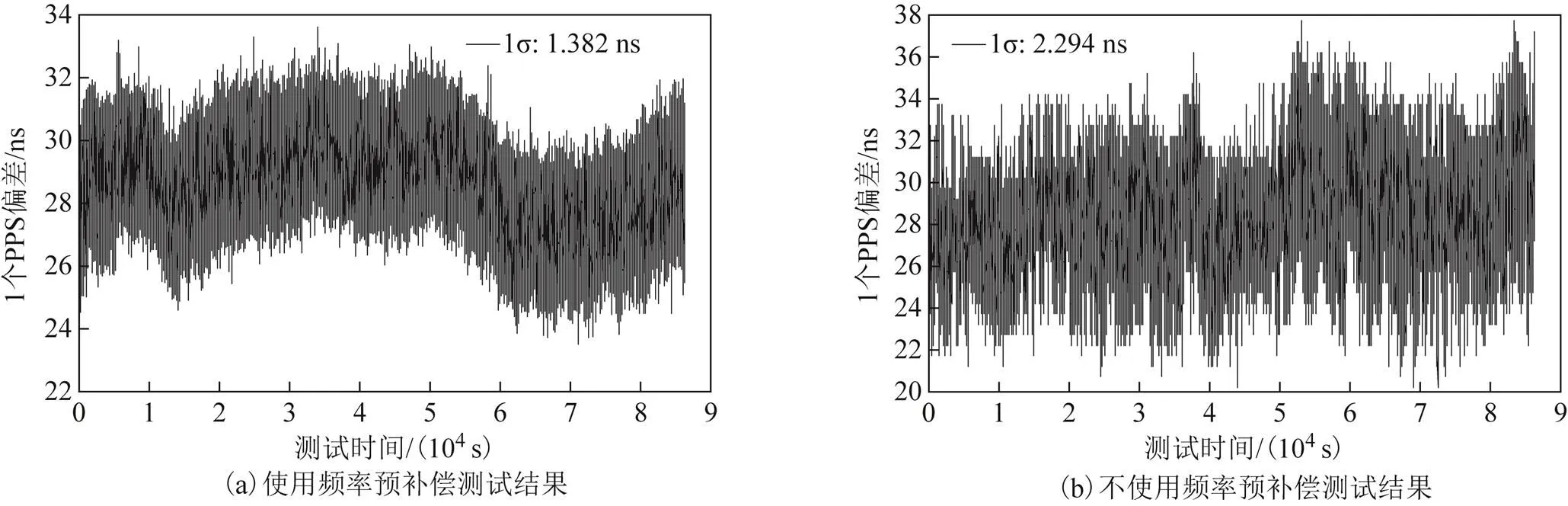
图8 GNSS接收机PPS与国家授时中心标准秒脉冲对比结果
4 结束语
[1] 谢钢. GPS原理与接收机设计[M].北京: 电子工业出版社, 2011: 166-171.
[2] 周巍. 北斗卫星导航系统精密定位理论方法研究与实现[D].郑州: 信息工程大学, 2013.
[3] 张勇, 张斌, 马能武. 单频GPS接收机的电离层延迟改正模型研究[J]. 大地测量与地球动力学, 2012, 32(2): 69-73.
[4] 马驰. RTK数据处理及接收机测量数据质量影响研究[D].长沙: 国防科技大学, 2014.
[5] 向为, 徐博, 牟卫华, 等. 基于锁相环的GNSS授时接收机钟差校准算法[J].国防科技大学学报,2013, 35(2):115-119.
[6] 唐卫明, 金蕾, 徐坤. 北斗卫星信号实时单站电离层估计算法及性能分析[J].武汉大学学报(信息科学版),2014, 39(11): 1318-1322.
[7] FENG Y, WANG J. GPS RTK performance characteristics and analysis[J]. Journal of Global Positioning Systems, 2008, 7(1): 1-8.
[8] 隋心. 多GNSS系统间双差模糊度构建与固定理论方法研究[D].武汉: 武汉大学, 2017.
[9] 聂文锋, 胡伍生, 潘树国, 等. 利用GPS双频数据进行区域电离层TEC提取[J].武汉大学学报(信息科学版), 2014, 39(9): 1022-1027.
[10] 李泽文, 姚建刚, 曾祥军, 等. 基于数字锁相原理的GPS高精度同步时钟产生新方法[J].电力系统自动化, 2009, 33(18): 82-86.
[11] 王霞迎, 秘金钟, 张德成. GPS广播星历位置、速度和钟差精度分析[J].大地测量与地球动力学, 2014, 34(3): 164-168.
[12] 张斌, 张东来. 基于GPS的高精度时钟在线校频与授时研究[J].中国电机工程学报, 2012, 32(10): 160-167.
[13] 周泽波, 沈云中, 李博峰. 双频GPS接收机钟差两种参数化方式的单历元解分析[J]. 测绘通报, 2008(9): 10-12.
[14] 寇艳红, 张其善. GPS接收机中晶振误差的模拟方法[J].电子与信息学报, 2004, 26(1): 1319-1324.
[15] 冀峰, 赵伟, 李荣冰, 等. GPS接收机时钟频率漂移误差分析及模型预测[J].数据采集与处理, 2010, 26(1): 544-548.
[16] 王卿, 宋铁成, 奉媛.基于GPS技术进行精确授时的方法[J].电气电子教学学报, 2007, 29(4): 34-38.
[17] 曾祥君, 尹项根, 林干, 等. 晶振信号同步GPS信号产生高精度时钟的方法及实现[J].电力系统自动化,2003, 27(8): 49-53.
[18] 郑凯, 郭博峰, 张小红. 接收机钟跳对单站GPS测速的影响及改正方法[J].武汉大学学报(信息科学版), 42(3): 304-308.
[19] 臧其源, 林时昌.振荡器的频率稳定度及其对电子系统的影响[M].北京: 宇航出版社, 1990: 20-46
A method of high-precise second pulse generation
LUAN Chao, SUN Feng, CHEN Jie, ZHAO Na
(Unicore Communications, Inc., Beijing 100094, China)
Aiming at the problems that the PPS precision of GPS receiver is in low precision, and there exists a bias over time, resulting in the time services of GPS receiver in one-hundred nanoseconds level, the paper proposed a second pulse output method based on the all system multi-frequency point receiver frequency pre-compensation correction: the error components of the all system multi-frequency point receiver were analyzed indirectly by using the measurement noise of the receiver, to determine the errors and instability performance of the receiver crystal; and the influence factors of second pulse accuracy were analyzed; then the verification was carried out with the all system multi-frequency point receiver. Experimental result showed that the proposed method coud help steadily output second pulse with a long time, and the overall performance could achieve the maximum time interval error (MTIE) less than 11 ns, and 1less than 2 ns within 24 h.
receiver clock error; high-precise time services; global positioning system
P228
A
2095-4999(2019)03-0102-06
2018-09-07
栾超(1987—),男,吉林长春人,硕士,工程师,研究方向为卫星导航基带算法。
孙峰(1982—),男,江苏徐州人,硕士,工程师,研究方向为卫星导航基带算法。
栾超,孙峰,陈杰,等.一种高精度秒脉冲产生方法[J].导航定位学报,2019,7(3):102-107.(LUAN Chao, SUN Feng, CHEN Jie, et al.A method of high-precise second pulse generation[J].Journal of Navigation and Positioning,2019,7(3):102-107.)
10.16547/j.cnki.10-1096.20190317.
猜你喜欢
地理空间信息(2022年10期)2022-10-31
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年4期)2022-08-15
导航定位学报(2021年5期)2021-10-13
空军工程大学学报(2021年2期)2021-05-29
导航定位与授时(2021年3期)2021-05-18
导航定位学报(2021年2期)2021-04-22
导航定位与授时(2020年5期)2020-09-23
中国新通信(2020年3期)2020-07-06
导航定位与授时(2019年3期)2019-05-16
