
基于蓝牙遥控的一种小型履带车结构设计
2019-08-26 05:40施炎李康
中国设备工程 2019年15期
施炎,李康
(重庆交通大学,重庆 400074)
近年来,随着技术的不断发展以及创新水平的不断提高,涌现出无数基于遥控技术发展起来的产品,现生活中比较常见的有无线遥控小车和无人机这两类产品,人们可以借助无人机或遥控小车代替人们针对比较危险或者人不方便进入的环境比如高污染区、灾害发生区以及其他的未知环境进行相应作业。一方面提高了人的安全性,另一方面降低了工作难度,从而提高了效率。它们虽在运行结构方式上存在较大差异,却能够优势互补,并在军事领域和民用领域发挥着重要作用。
本次设计了一种基于蓝牙控制的可携带网络摄像头及传感器的履带型小车,网络摄像头可以将传感器显示屏上的数据信息以图像的形式传输。无线遥控小车最早源于美国,在20 世纪我国开始了对遥控小车的研究。现在主要可以通过蓝牙、红外、射频等方式对小车进行遥控。其中,蓝牙可以实现在多个设备之间的进行信息传输,实现信息共享,这是它的一大优势,另一方面,它的不足主要在于传输距离上的限制。相信随着技术的发展,这一问题可以得到解决,并会在未来得到更广泛的应用。
1 结构设计方案

图1 总体结构示意图
该履带车底座7 主要用来装载步进电机,驱动器、摄像头等电子设备,主动轮6 通过联轴器与步进电机轴直接相连,主动轮与履带采用节销式啮合传动。张紧轮4 可以控制履带的松紧程度,支承轮一方面可以起到支撑整个车座的作用,一方面可以可以撑住履带,防止履带因过于下垂不利于传动。
2 结构参数计算
(1)质量计算。主要部件质量参数:履带1.5kg/个,步进电机1kg/个,一个驱动器0.5kg/个,驱动轮、张紧轮、支撑轮共计500g,
设总质量为M,则M=1.5×2+1×2+0.5×2+0.5=6.5kg。
(2)履带宽度计算公式:

取B=39mm。
(3)履带轨距公式:

(4)履带支撑面长度L0。通常情况下,履带接地长度L0和履带轨距b 的比值,即。
(5)驱动轮设计。根据链条标准GB/T 1243-2006,选取05B 滚子链,采用节销式啮合传动,因小车的实际转速要求不高,驱动轮齿数可以为偶数20,为减少工作应力,驱动轮工作面最好为凹型。
驱动轮节圆直径:

(6)电机驱动力矩(图2)。
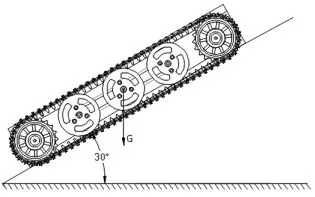
图2 小车斜坡爬行受力示意图
F 为总阻力;f 为滚动阻力系数;θ 为最大设计坡度角。
以干混凝土地面为例,f=0.05,θ=30°则

总驱动力矩

因为小车是双轮驱动,所以电机转矩

结合实际情况同时为保证足够的驱动力矩,可选用转矩为0.55N ⋅ m 的步进电机。
3 蓝牙遥控及信息传输方案

图3 方案示意图
以STM32 单片机为控制核心,通过蓝牙模块接受手机传输过来的控制信号实现对两个步进电机的正反转控制,通过步进电机的正转和反转实现小车的前进、倒退、转弯和停止。网络摄像头可以通过无线网络与客户端实现共联,方便地将小车的周围环境画面传输到客户端上,以便对其进行控制。传感器的信息将通过蓝牙模块直接传输至客户端上。经过调试,小车可以进行正常地行驶和工作。

图4 实物图
4 结语
本文设计了一种基于蓝牙控制的无线遥控小车,对小车的结构参数进行了计算,并使其结构能够较好的容纳步进电机,驱动器和装载传感器和和摄像头等设备;并利用STM32 单片机编制出小车的蓝牙控制程序,实现了对小车的遥控,并通过蓝牙将传感器检测到的信息传至客户端口。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
小学生优秀作文(低年级)(2021年11期)2021-12-06
兵器装备工程学报(2021年3期)2021-04-09
中国新技术新产品(2020年4期)2020-05-05
语文世界(小学版)(2019年2期)2019-02-24
科技创新导报(2016年27期)2017-03-14
科技视界(2014年6期)2014-12-24
小天使·一年级语数英综合(2014年7期)2014-06-26
环球时报(2012-03-28)2012-03-28
