
基于表观电导率和Hydrus模型同化的土壤盐分估算
2019-08-23 02:18:46姚荣江杨劲松郑复乐王相平谢文萍
农业工程学报 2019年13期
姚荣江,杨劲松※,郑复乐,王相平,谢文萍,张 新,尚 辉
基于表观电导率和Hydrus模型同化的土壤盐分估算
姚荣江1,2,杨劲松1,2※,郑复乐1,3,王相平1,谢文萍1,张 新1,2,尚 辉4
(1. 土壤与农业可持续发展国家重点实验室/中国科学院南京土壤研究所,南京 210008;2. 中国科学院南京分院东台滩涂研究院,东台 224200;3. 中国科学院大学,北京 100049;4. 江苏省沿海开发(东台)有限公司,东台 224237)
精细刻画农田土壤盐分运移过程对盐渍化精准治理具有重要意义。该文以磁感式大地电导率仪EM38测定的土壤表观电导率作为数据源,利用表观电导率与剖面土壤盐分之间的反演模型作为观测算子,将集合卡尔曼滤波(ensemble Kalman filter,EnKF)同化方法应用于土壤水盐运移过程模型(HYDRUS-1D),进行滨海盐渍农田周年土壤盐分动态的模拟,并分析了同化过程的敏感性。结果表明:与单纯使用HYDRUS模型相比,EnKF同化方法对模型观测算子的更新,有效提高剖面土壤盐分模拟精度,且EnKF同化值的精度优于EnKF同化模拟值,在同化过程中的调整量亦最大;敏感性分析结果显示土壤盐分同化过程对状态变量集合数大小不敏感,对观测数据误差和引入观测数据的深度较为敏感,观测数据误差水平越高、引入观测数据的深度越浅其误差越大。研究表明基于水盐运移模型和土壤表观电导率数据的EnKF同化方法能提高土壤盐分的模拟精度,为利用多源数据和机理模型进行较大尺度生态过程模拟预测提供了有效手段。
土壤;电导率;盐分;水盐运移模型;磁感式大地电导率仪;数据同化;集合卡尔曼滤波
0 引 言
不同类型的盐渍土是中国重要的现实和潜在农业资源。据统计,中国目前拥有各类可利用盐渍土资源约3.67×107hm2,其中具有农业利用前景的盐渍土总面积1.23×107hm2[1],其治理改造对保障粮食安全、保持耕地稳定和推进生态建设具有重要意义。目前,土壤水盐运动过程和运移机理研究仍是盐渍土研究的核心问题,农田土壤水盐运移模型研究是阐明农田土壤水盐动态变化规律、进行农田水盐运移精细模拟预报以及水盐调控的有效方法[2-3]。自20世纪90年代以来,中国分别从点源、田块和区域等多个尺度开展了农艺覆盖[4]、咸水或微咸水利用[5-6]、耕作管理[7]、冻融[8]、节水灌溉[9]、改良调理剂应用[10]以及水-热-盐耦合运移[11]等方面的大量研究工作,为不同盐渍化区域的土壤水盐调控与盐渍化防控提供重要理论基础。但在田间和区域尺度上,土壤属性的时空异质性依然是制约水盐运动过程模拟预测的重要因素,当模型扩展到较大的空间尺度时,水盐运移模型参数、边界条件的时间和空间变异性增大,并且当观测数据较少时,模型参数校正困难,其计算误差随着时间累积[12]。
许多研究表明,利用遥感等多源观测数据在大面积范围上的连续观测,通过同化算法对生态过程模型中的关键参数进行调整,可以更好地预测土壤属性[13-14]。目前,集合卡尔曼滤波(ensemble Kalman filter)同化方法已被用于生态水文、作物生长等模型与遥感、近地传感观测数据的同化研究中[15]。Reichle等[16]研究了多源遥感数据与水文过程模型的土壤水分同化方法,表明多源遥感数据的同化在地表土壤水分含量估计中潜力较大;Crow等[17]利用集合卡尔曼滤波和SAC水文模型对降雨量校正后可提高径流量预测精度;刘昭等[18]研究发现集合卡尔曼滤波数据同化方法能提高生态机理模型(boreal ecosystem productivity simulator,BEPS)对冬小麦根层土壤水分的预测精度,同时观测数据质量对同化模拟结果有较大影响;王文等[19]通过同化试验表明集合卡尔曼滤波提高了HYDRUS-1D模型对0~50 cm土壤剖面含水率的预测精度,并发现同化过程中的状态变量及关键状态参数对同化结果影响较大;陈鹤等[20]研究发现利用集合卡尔曼滤波将遥感数据同化到陆面过程模型(hydrologically-enhanced land process,HELP)中,可提高绿洲农田土壤温湿度模拟精度;黄健熙等[21]研究发现遥感信息MODIS-LAI与作物模型WOFOST结合的数据同化是有效的区域作物产量预测方法;此外,丁建丽等[22]研究表明MODIS与Landsat TM数据与HYDRUS模型同化后提高土壤水分监测精度。在这些研究中,多源观测数据引入与同化方法的应用都显著提高模拟效果,但同化效果还与引入观测数据的误差水平、频率、状态变量和参数的误差、数据集合数大小等因素密切相关。
因此,本文采用近地传感器(磁感式大地电导率仪EM38)测定的表观电导率作为数据源,结合HYDRUS土壤溶质运移模型和集合卡尔曼滤波(ensemble Kalman filter,EnKF)同化算法,再引入剖面土壤水分、盐分的实测资料,对滨海围垦区典型盐渍化农田的土壤盐分迁移过程进行模拟,旨在剖析数据同化对土壤盐分运移模拟结果的效应并解析影响数据同化的敏感性因素,为土壤盐渍化演变过程精细刻画及其生态治理修复提供一定理论基础。
1 研究区概况与数据来源
1.1 研究区概况
试验地点位于江苏省东台市沿海的黄海原种场,该农场地理位置介于32°3804~32°3935N,120°5243~120°5422E(图1)。该区东临黄海,多年平均气温14.7 ℃,降水量1 042 mm,蒸发量1 417 mm,降雨量随季节波动大,6‒9月份的雨季降雨量约占全年65%。由于该农场缺乏蓄水工程,一般采用抽自地下300~400 m的深井淡水(矿化度0.3 g/L)和地表咸水混合后进行灌溉。该地区土壤主要发育于江淮冲积-海相沉积物母质,以粉砂级(0.02~0.002 mm)为主,其土壤性质为淤长型平原海岸的典型代表。本研究的试验地块面积约1.02 hm2,围垦于2004年并从2006年开始水稻-大麦轮作。自2010年后,由于水资源匮乏该地块改为玉米-大麦轮作制。试验地块的地下水埋深介于0.8~1.8 m,土壤水盐运动活跃,盐渍化具有长期性和反复性。
1.2 观测数据来源
本研究采用的观测数据样点分布与来源区域如图1所示,包括磁感式大地表观电导率、气象资料、地下水和土壤基本理化性质等。其中试验地块的磁感式大地表观电导率样点间距4 m,行距10 m,试验区每次采集252个样点数据;土壤采样点平均间距16 m,每次采集64个样点的剖面土壤样品;试验区布设3个观测井以对地下水的电导率、埋深和温度进行实时监测。各数据的采集时间、主要指标与来源列于表1。

图1 试验区地理位置、采样点与EM38调查点分布
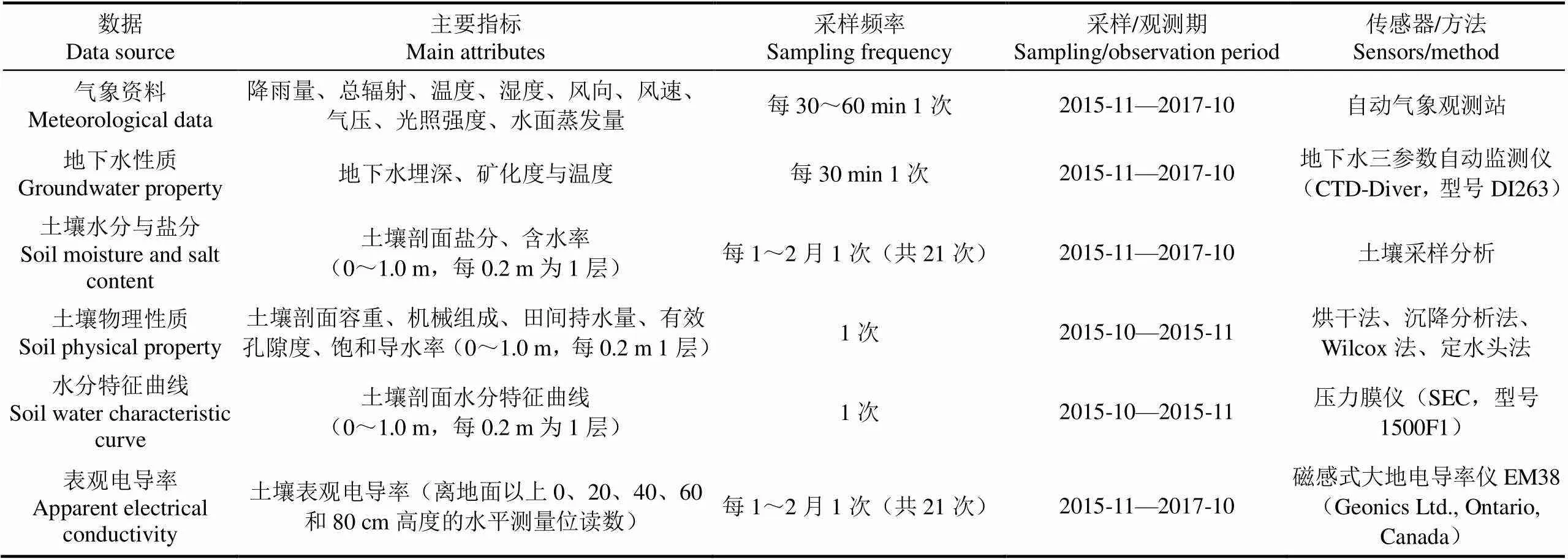
表1 本研究使用观测数据的概况及其来源
气象资料由主要指标见表1,利用以上气象资料,可由彭曼-蒙特斯(Penman-Monteith)公式计算获得试验期间逐日作物腾发量(ETc)。观测井采集的地下水数据在本研究中作为土壤水盐运移模拟的下边界条件。土壤水分、盐分含量通过田间采样实测,分层采集剖面土壤样品并测定盐分与含水率,在本文中用作水盐运动模拟的初始条件。土壤物理性质包括容重、机械组成、田间持水量和有效孔隙度,同时测定土壤水分特征曲线,本研究中土壤物理性质与水力特征参数用于驱动土壤水盐运移模拟的HYDRUS模型。不同时段土壤表观电导率通过近地传感器—磁感式大地电导率仪EM38获取,EM38采用水平测量位,考虑到EM38对不同深度土壤盐分响应曲线的差异,分别在离地面以上0、20、40、60和80 cm处测量,测量频率每1~2月进行1次(土壤采样同步进行),每次EM38测量均在同一点位进行,2015年11月‒ 2016年10月期间共计采集11次EM38数据。本文中不同时段EM38测定的表观电导率(取平均值)作为土壤盐分同化的观测数据源。
2 土壤盐分模拟方法
2.1 土壤水盐运移模型模拟方法
HYDRUS模型主要应用数值解法解决变饱和土壤中垂向一维水分、溶质和热量的运移问题[23-24]。对于本研究,假设气相对水分运动的模拟不起重要作用,采用忽略土壤热量梯度及溶质对水输运过程影响的Richards方程。根据已有的实测数据与研究区实地情况,本文中HYDRUS水分运动模拟的上边界条件设置为表层大气边界,下边界为变压力水头,盐分运移模拟的上、下边界条件均设置为浓度边界。由于观测点土壤初始盐分含量较高,作物出苗率较低,长势较差,因此模型未考虑作物根系生长与吸水。HYDRUS模型参数中,土壤水分特征曲线采用压力膜仪测定并用Van Genuchten模型拟合参数,饱和导水率采用定水头法测定;土壤水分扩散率采用吸湿条件下的水平土柱入渗法测定,并将计算得到的水分扩散率与含水率利用指数函数关系拟合获得;纵向弥散系数根据实测资料通过数值法最优化拟合反求出;Freundlich线性等温吸附参数利用等温静态平衡吸附试验测定。利用土壤水分、盐分实测数据进行率定后的HYDRUS模型参数取值列于表2。
2.2 水盐运移模型与表观电导率数据同化方案
数据同化系统主要由模型算子、观测算子、同化算法和数据(驱动数据、参数集、观测数据)构成。模型算子用来描述土壤水分、盐分运动过程,一般为时间上连续的动态模型,本文利用HYDRUS-1D模型作为模型算子,结合驱动数据(气象资料、地下水与土壤数据)和参数集(水力特征参数)以模拟土壤中的水盐运动;观测算子用来建立状态变量和观测数据之间的关系,本研究以文献[25]中该研究区土壤剖面盐分分布与表观电导率间的反演模型作为观测算子;同化算法用于耦合模型算子和观测算子,其综合考虑模型误差和观测误差,利用观测数据对水盐运移模型的输出状态变量进行优化,以提高模型状态变量的估计精度。本文以2015年11月‒2016年10月间获取的表观电导率观测数据和土壤盐分实测值作为数据源,采用集合卡尔曼滤波(EnKF)进行同化试验研究。本文中同化算法的观测算子为0~1 m土体盐分分布与表观电导率间的反演模型[25]。

表2 HYDRUS模型参数取值
注:和为水分特征曲线的经验形状参数。
Note:anddenote the empirical shape parameters of the soil water characteristic curve.
EnKF是在20世纪90年代中后期根据Epstein的随机动态预报理论发展起来的一种顺序数据同化算法。采用EnKF进行数据同化时,首先利用蒙特卡罗方法扰动生成HYDRUS模型预报的状态变量集合,认为每一时刻状态变量集合的平均值为该时刻状态变量的最佳估计。本研究中,EnKF主要分为预测和分析2步:在无观测值的时刻,直接利用HYDRUS模型进行模拟,即利用前一时刻的状态变量值模拟预测下一时刻的状态变量;当有观测值的时刻,引入观测值,通过卡尔曼滤波进行分析,同时考虑模型预报误差和观测值的误差,利用卡尔曼增益对模拟结果进行校正,然后利用同化后的状态变量预报下一时刻的状态变量[26-27]。
考虑实测数据来源,HYDRUS-1D模型将土壤设为5层,距地表向下深度分别为0.2、0.4、0.6、0.8和1.0 m。模型以试验开始前的土壤水分、盐分含量作为初始条件,以地下水数据为下边界条件,将气象资料作为上边界条件,并取逐日平均值代入模型。模型将测定的土壤基本物理性质与水分特征曲线作为参数集,以11个时期的土壤盐分、表观电导率实测值作为观测数据进行同化和误差分析。同化方案的具体流程如图2所示。


注:为土壤盐分初始值,g·kg-1;为第i层土壤盐分初始值集合,g·kg-1;、分别为t、t+1时刻土壤盐分分析值,g·kg-1;、分别为t、t+1时刻第i层土壤盐分分析值集合,g·kg-1;pi,t为t时刻土壤盐分状态误差,其服从平均值为、标准差为Pta的正态分布;为t+1时刻土壤盐分预测值,g·kg-1;为t+1时刻土壤盐分预测值集合,g·kg-1;Yi,t+1表示土壤表观电导率观测值集合,mS·cm-1;υi,t+1表示观测误差扰动,其服从平均值0、标准差Rt+1的正态分布,mS·cm-1;h表示观测算子;Kt+1表示卡尔曼滤波增益。
在同化过程中,土壤盐分有4组数据,即实测值、HYDRUS模拟值(不加任何观测值只用HYDRUS得到的模拟值)、EnKF同化值(引入表观电导率、观测算子和卡尔曼增益而得到,即上文中的分析值)和EnKF同化模拟值(仅引入上一时刻EnKF同化值,再利用HYDRUS得到的模拟值)。
2.3 同化误差评价
采用相对误差(relative error,RE)、均方根误差(root-mean-square error,RMSE)、决定系数(2)和Nash效率系数(Nash-Sutcliffe efficiency coefficient,NSE)评价数据同化误差,以量化HYDRUS-1D模拟值、EnKF同化模拟值以及EnKF同化值与实测值间的偏差程度,明确数据同化对土壤盐分模拟精度的提升效果。




为进一步剖析同化效果产生的原因,对同化与未同化条件下HYDRUS模型主要状态变量(土壤盐分)的变化情况进行对比分析。其中,同化是指加入剖面土壤盐分实测值更新状态变量,再利用HYDRUS模型模拟的过程,即EnKF同化模拟值;未同化是指而未加入盐分实测值,直接用HYDRUS模型模拟的过程,即HYDRUS模拟值。主要评价指标包括:1)土壤盐分的差值。差值=EnKF同化值-HYDRUS模拟值,S同化差值=EnKF同化值-EnKF同化模拟值;2)同化对HYDRUS模拟的调整量。调整量=EnKF同化模拟值-HYDRUS模拟值;3)同化、未同化条件下土壤盐分误差。同化误差=EnKF同化模拟值-实测值;未同化误差=HYDRUS模拟值-实测值。
3 结果与分析
3.1 土壤盐分数据同化
本文以不同深度土壤盐分与表观电导率间的反演模型作为观测算子,对剖面0~1.0 m土壤盐分含量进行同化,由于土壤水分运移的率定具有较高的精度,因而未考虑土壤水分运移对盐分同化的影响。模型中土壤盐分初始状态变量为2015年10月31日实测剖面土壤盐分,首先用初始土壤剖面盐分加上高斯白噪声(均值为0,标准差设为0.01)生成初始土壤剖面盐分的集合;同时,在数据同化前需要确定集合数,集合数越大其代表性越强、分析误差越小,但计算量越大。综合考虑集合代表性与计算效率,本研究选取集合数100以避免集合成员代表性差,甚至滤波发散的情况。2015年11月1日‒2016年10月31日期间(共366 d),利用HYDRUS模型与EnKF数据同化获取的0~100 cm土壤盐分模拟结果如图3所示。

注:同化模拟值为仅引入上一时刻EnKF同化值,再利用HYDRUS得到的模拟值;同化值为引入表观电导率、观测算子和卡尔曼增益而得到。下同。
表3列出了土壤盐分HYDRUS模拟值、EnKF同化模拟值、EnKF同化值与实测值间的统计对比结果。可以看出:1)HYDRUS模拟值与实测值间的误差最大,其RMSE在0.460~0.725 g/kg之间;EnKF同化模拟值优于HYDRUS模拟值,其RMSE介于0.307~0.547 g/kg;EnKF同化值进一步优于EnKF同化模拟值,其RMSE介于0.219~0.353 g/kg,NSE和2亦显著提高。2)当土壤盐分发生较大幅度的变化时,如在滨海地区连续降雨的雨季(250~285 d),HYDRUS模拟值与实测值间的误差最大,引入实测值后,EnKF同化模拟值、EnKF同化值与实测值间的误差大幅降低,表明EnKF同化提高土壤盐分的模拟精度。3)EnKF同化对剖面各层土壤盐分模拟均具有较好效果,这也使得剖面土壤盐分的EnKF同化值优于HYDRUS模拟值和EnKF同化模拟值,尤其是对深层土壤盐分,如>80~100 cm土层,EnKF同化值的RMSE为0.221 g/kg,显著低于HYDRUS模拟值的0.426 g/kg和EnKF同化模拟值的0.344 g/kg,NSE和2亦有较大幅度提高。4)土壤盐分波动较为平缓的时段,HYDRUS模拟值、EnKF同化模拟值、EnKF同化值与实测值间的误差较小,当土壤盐分剧烈变化时,HYDRUS模型的模拟精度降低,此时引入实测值进行同化可对HYDRUS模型的状态变量进行连续调整,使得EnKF同化模拟值、EnKF同化值更接近实测值。
3.2 同化误差分析
土壤盐分HYDRUS模拟值、EnKF同化模拟值、EnKF同化值间的差值与调整量以及同化、未同化条件下土壤盐分模拟值的误差如图4~图6所示。可以看出:1)对比图4中土壤盐分EnKF同化值与HYDRUS模拟值、EnKF同化模拟值间的差值,土壤盐分EnKF同化值与EnKF同化模拟值间的差值的绝对值(均值为0.139 g/kg),要明显低于其与HYDRUS模拟值的绝对值(均值为-0.279 g/kg),表明模拟精度得到提高。2)从图5中同化对HYDRUS模拟的调整量来看,EnKF同化模拟值与HYDRUS模拟值间的差值基本为负值,原因在于HYDRUS模型引入经同化更新的状态变量(土壤盐分)后,在下一时刻模型的初始条件发生改变,进而改变HYDRUS模型的运行轨迹,使其不断接近真实值;此外,调整量随降雨表现出规律性,降雨频繁使土壤盐分运动活跃,导致HYDRUS模拟误差增加,其调整量亦随之增大。总体上,HYDRUS模拟值、EnKF同化模拟值高估了土壤盐分;未同化误差介于0.082~0.437 g/kg(均值为0.289 g/kg),同化误差在-0.137~0.227 g/kg(均值为0.097 g/kg);从模拟误差比较来看,同化模拟误差要明显小于未同化模拟误差,表明在整个剖面上同化均表现出较好效果(图6)。

表3 土壤盐分HYDRUS模拟值、EnKF同化模拟值、EnKF同化值与实测值间误差分析

注:S差值为EnKF同化值与HYDRUS模拟值的差值,S同化差值为EnKF同化值与EnKF同化模拟值的差值。
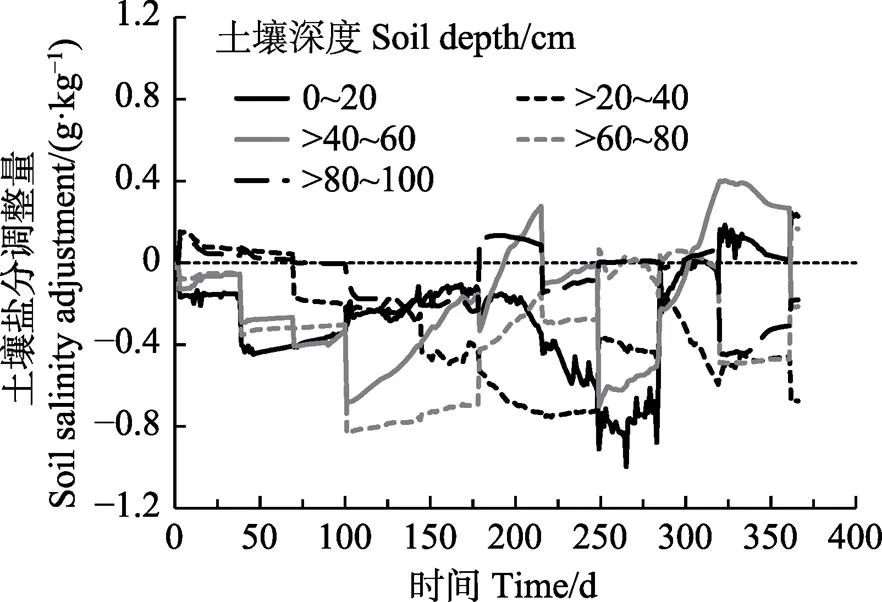
注: S调整量为EnKF同化模拟值与HYDRUS模拟值的差值。
3.3 同化过程的敏感性分析
3.3.1 集合数变化
状态变量集合数的大小是影响卡尔曼滤波计算效率的重要因素。本文选取集合数分别为25、50、75和100,并对盐分运移过程进行模拟。结果如图7所示,图7显示了各集合数条件下剖面土壤盐分的EnKF同化模拟值、HYDRUS模拟值与实测值。可以看出,不同集合数下土壤盐分EnKF同化模拟结果与HYDRUS模拟值、实测值存在一定偏差,随着集合数的增加EnKF同化模拟值更接近实测值,总体上土壤盐分模拟结果对集合数的大小并不十分敏感,仅在盐分运动较为活跃的季节存在较大差异,如2016年7月2日(245 d)–8月4日(278 d)正值滨海地区的雨季。总体上,75与100集合数下土壤盐分的模拟结果极为接近,即集合数大于75时盐分模拟结果趋于一致。

注: S同化误差为EnKF同化模拟值与实测值的差值,S未同化误差为HYDRUS模拟值与实测值的差值。
3.3.2 观测值误差
土壤盐分观测数据的精度与准确性直接影响集合卡尔曼滤波数据同化的精度。研究假设引入的11个观测时段土壤表观电导率观测值分别存在2.5%、5%、10%、15%和20%的误差,对不同误差水平下剖面各层土壤表观电导率观测值扰动后进行同化,得到各误差水平下剖面土壤盐分的EnKF同化模拟值、HYDRUS模拟值与实测值,如图8所示。可以看出,观测值误差越大,EnKF同化模拟值与实测值、HYDRUS模拟值的偏差越大,观测值误差越小其偏差亦越小;当观测误差小于5%时,与实测值相比,同化后的模拟结果仍有不同程度的改善,当观测误差到10%时已基本无同化效果;这是由于观测值误差的引入导致单点同化时误差增加,同化模拟值和同化值的误差均增大,状态变量调整后再进行HYDRUS模拟其误差亦不断累积。

图7 不同集合数条件下剖面土壤盐分的EnKF同化模拟值、HYDRUS模拟值与实测值

图8 不同观测误差条件下剖面土壤盐分的EnKF同化模拟值、HYDRUS模拟值与实测值
3.3.3 引入不同深度观测数据
土壤盐分运动过程中不同深度盐分之间存在垂向运移,因而引入观测数据的深度对同化后模拟的精度也会产生影响。本研究分别引入5个深度的土壤表观电导率观测值和观测算子进行同化,得到的土壤盐分EnKF同化模拟值、HYDRUS模拟值与实测值如图9所示。可以看出,对于各层土壤盐分均是引入0~20 cm、20~40 cm、40~60 cm、60~80 cm和80~100 cm 5层观测值进行同化模拟的精度最高,其次是引入0~20 cm、20~40 cm、40~60 cm、60~80 cm 4层观测值,仅进入0~20 cm土层观测值的模拟精度最差;总体来看,0~20 cm土壤盐分的模拟精度对引入观测数据的数量不敏感,60~80 cm和80~100 cm土壤盐分对引入观测数据的数量较为敏感;此外,当引入变量数较少时,同化效果不显著,此时EnKF同化模拟值与HYDRUS模拟值差异较小,这可能是本文对土壤盐分的同化未考虑水分的运动,同时本文的同化主要是对状态变量的调整,未对相关状态参数,如饱和导水率和纵向弥散系数进行调整更新所致。

注:1~5分别表示引入1层(0~20 cm)、2层(0~20、>20~40 cm)、3层(0~20、>20~40和>40~60 cm)、4层(0~20、>20~40、>40~60和>60~80 cm)、5层(0~20、>20~40、>40~60、>60~80和 >80~100 cm)的观测值。
4 讨 论
土壤水力特征参数是影响水分和溶质运移模拟精度的重要因素。本文未考察饱和导水率、纵向弥散系数等状态参数变化对盐分同化模拟的影响,原因在于:1)前期已对饱和导水率、纵向弥散系数等重要参数进行了率定,且水分模拟具有较高精度,因此假设水分运动是真实过程的反映;2)本文旨在探讨利用近地传感器EM38测定的表观电导率和EnKF方法提高土壤盐分运移的模拟精度,EM38能实时、快速地对土壤表观电导率进行非接触式的测量,并反演出1 m剖面土壤盐分分布作为同化系统中观测算子,这与其他数据获取手段相比具有明显的优点,而除了埋藏式传感器外,目前尚没有能对土壤水分剖面进行高精度、非接触式测量的近地传感器。
数据同化提高了土壤盐分的模拟精度,EnKF同化模拟值和EnKF同化值更接近实测值。整体上剖面土壤盐分含量被高估,这是由于HYDRUS模型模拟结果整体高于土壤盐分实测值(水分已率定),EnKF同化尽管将模拟的土壤盐分拉近至实测盐分值,但是并不能完全消除模拟值过高的影响。事实上,本研究中土壤盐分的同化误差不仅来源于盐分运移模型与参数(如纵向弥散系数、等温吸附参数),还来自土壤水分运移模型参数(如饱和导水率、水分特征曲线)、大气驱动参数(降雨、蒸发、径流等)以及观测数据误差。首先,本研究仅关注盐分运移过程,在数据同化时仅调整状态变量,未对土壤溶质运移参数进行更新,这对模拟的土壤盐分造成一定的误差,并随时间累积。其次,土壤水分运移参数(如饱和导水率、水分特征曲线等)和大气驱动参数(降雨、蒸发、地表径流等)存在不确定性,尽管这些参数均通过田间或室内实测,或者利用成熟的公式预测获得,但对土壤盐分进行同化时,水分运移过程已不可避免地带入固定误差;虽然在前期已进行了参数的率定,但受制于实验条件,多尺度转换模型缺失导致无法获得与尺度匹配的参数[28-29],模型参数仍用单点的参数替代。再次,观测数据的误差可能也是土壤盐分被整体高估的重要因素,本研究利用EM38测定的表观电导率与土壤盐分间的反演模型作为观测算子,一方面,表观电导率受到土壤含水率、容重、质地等因素的影响,且表观电导率在一天中随温度存在波动,而在模型模拟时很难看到这种变化;另一方面,尽管文献[25]中表观电导率反演土壤盐分的精度较高(2>0.93),但观测算子还是不可避免存在误差,如表3中40~60 cm土壤盐分EnKF同化模拟值低于实测值。因此,为了提高同化的精度,不仅要提高观测数据的准确性,还应提高水力特征参数、溶质运移参数和大气驱动参数的精度。
敏感性分析结果表明,土壤盐分对状态变量集合数的大小并不十分敏感;Houtekamer等研究认为100个集合成员足以精确地描述其局地非均质性[27];本文中当集合数大于75时结果已趋于一致,这与目前已有的研究结果相符,如Mitchell等的同化试验中应用64个集合成员取得了很好的效果[30],张生雷等[31]认为采用适宜的集合数有助于提高同化效果和计算效率。本研究发现土壤盐分同化对观测数据误差水平较为敏感,当观测误差大于5%时,同化效果已大幅降低,当观测误差到10%时已无同化效果,而刘昭等[18]研究发现土壤水分观测值即使存在10%的误差对模拟结果也存在改善效果,这主要是由于本研究中盐分同化的误差来源较复杂,包括了盐分和水分模拟误差,因而其受观测数据误差的影响更大。本文中土壤盐分同化对引入观测数据的深度极为敏感,尤其是剖面深层土壤盐分,这与目前文献报道的结果是一致的[32];目前大多数研究认为利用表层土壤属性估测深层土壤属性时,其有效的深度一般在0~50 cm以内,低于该深度基本无同化效果。
5 结 论
本研究利用磁感式大地表观电导率仪EM38测定的表观电导率作为数据源,结合土壤水盐运移模型HYDRUS和集合卡尔曼滤波EnKF对土壤盐分运移进行同化模拟。结果表明:1)EnKF同化方法提高0~1 m剖面土壤盐分模拟精度, EnKF同化值较EnKF同化模拟值、HYDRUS模拟值的RMSE低,EnKF同化值优于EnKF同化模拟值和HYDRUS模拟值,而EnKF同化模拟值优于HYDRUS模拟值;2)实测值与EnKF同化模拟值间的误差小于其与HYDRUS模拟值间的误差, EnKF同化值对土壤盐分的调整量大于EnKF同化模拟值,数据同化对时序变化较为平缓的土壤盐分调整量较小,土壤盐分变化越剧烈其同化调整量越大,模拟精度提升效果越好;3)土壤盐分同化对状态变量集合数大小不敏感,对观测数据误差和引入观测数据的深度较为敏感,观测数据误差水平越高、引入观测数据越少其误差越大,反之亦然,且深层土壤盐分同化对引入观测数据的敏感性强于表层。
盐渍化是制约滨海地区农业与生态可持续发展的重要因素,为了更加精细地描述土壤盐分运动,今后的研究进一步深入探讨模型参数调整、观测数据采集频率等因素对盐分同化的敏感性,同时将更加注重多源数据的同化,如将近地传感和遥感等多源数据结合,使数据同化的范围可由单点扩展到区域。
[1] 杨劲松,姚荣江. 我国盐碱地的治理与农业高效利用[J]. 中国科学院院刊,2015,30(S):162-170. Yang Jinsong, Yao Rongjiang. Management and efficient agricultural utilization of salt-affected soil in China[J]. Bulletin of Chinese Academy of Sciences, 2015, 30(S): 162-170. (in Chinese with English abstract)
[2] 李保国,李韵珠,石元春. 水盐运动研究30年(1973-2003)[J]. 中国农业大学学报,2003,8(Z1):5-19. Li Baoguo, Li Yunzhun, Shi Yuanchun. Thirty years (1973-2003): Research on soil water and salt movement[J]. Journal of China Agricultural University, 2003, 8(Z1): 5-19. (in Chinese with English abstract)
[3] 石元春. 黄淮海平原的水盐运动[M]. 北京:中国农业大学出版社,2013.
[4] 王婧,逄焕成,任天志,等. 地膜覆盖与秸秆深埋对河套灌区盐渍土水盐运动的影响[J]. 农业工程学报,2012,28(15):52-59. Wang Jing, Pang Huancheng, Ren Tianzhi, et al. Effect of plastic film mulching and straw buried on soil water-salt dynamic in Hetao plain[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(15): 52-59. (in Chinese with English abstract)
[5] Ju Z, Du Z, Guo K, et al. Irrigation with freezing saline water for 6 years alters salt ion distribution within soil aggregates[J]. Journal of Soils and Sediments, 2019, 19(1): 97-105.
[6] Yuan Chengfu, Feng Shaoyuan, Huo Zailin, et al. Effects of deficit irrigation with saline water on soil water-salt distribution and water use efficiency of maize for seed production in arid Northwest China[J]. Agricultural Water Management, 2019, 212: 424-432.
[7] Assouline S, Benhur M. Effects of water applications and soil tillage on water and salt distribution in a Vertisol[J]. Soil Science Society of America Journal, 2003, 67(3): 852-858.
[8] 张越,杨劲松,姚荣江. 咸水冻融灌溉对重度盐渍土壤水盐分布的影响[J]. 土壤学报,2016,53(2):388-400. Zhang Yue, Yang Jinsong, Yao Rongjiang. Effects of saline ice water irrigation on distribution of moisture and salt content in coastal saline soil[J]. Acta Pedologica Sinica, 2016, 53(2): 388-400. (in Chinese with English abstract)
[9] Wang R, Wan S, Sun J, et al. Soil salinity, sodicity and cotton yield parameters under different drip irrigation regimes during saline wasteland reclamation[J]. 2018, 209: 20-31.
[10] 胡育骄,王小彬,赵全胜, 等. 海冰水灌溉对不同施肥方式下土壤盐分运移及棉花的影响[J]. 农业工程学报,2010,26(9):20-27. Hu Yujiao, Wang Xiaobin, Zhao Quanshen, et al. Effect of sea ice water irrigation and different fertilizations on soil salinity dynamics and cotton[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(9): 20-27. (in Chinese with English abstract)
[11] 刘炳成,李庆领. 土壤中水、热、盐耦合运移的数值模拟[J]. 华中科技大学学报:自然科学版,2006,34(1):14-16. Liu Bingcheng, Li Qingling. Numerical simulation of salt, moisture and heat transport in porous soil[J]. Journal of Huazhong University of Science & Technology: Nature Science Edition, 2006, 34(1): 14-16. (in Chinese with English abstract)
[12] 李彦. 节水灌溉条件下河套灌区土壤水盐动态的SWAP模型分布式模拟预测[D]. 呼和浩特:内蒙古农业大学,2012. Li Yan. SWAP Model Distributed Simulation and Forecast of Soil Water and Salt Dynamics in Hetao Irrigation District Under Condition of Water-saving Irrigation[D]. Hohhot: Inner Mongol Agricultural University, 2012. (in Chinese with English abstract)
[13] Moradkhani H. Hydrologic remote sensing and land surface data assimilation[J]. Sensors, 2008, 8(5): 2986-3004.
[14] Ahmadalipour A, Moradkhani H, Yan H, et al. Remote Sensing of Drought: Vegetation, Soil Moisture, and Data Assimilation[M]//Lakshmi V. Remote Sensing of Hydrological Extremes. Springer, Cham: Springer Remote Sensing/Photogrammetry, 2017.
[15] Montzka C, Pauwels V, Hendricks-Franssen H, et al. Multivariate and multiscale data assimilation in terrestrial systems: A review[J]. Sensors, 2012, 12: 16291-16333.
[16] Reichle R H, Crow W T, Keppenne C L. An adaptive ensemble Kalman filter for soil moisture data assimilation[J]. Water Resources Research, 2008, 44(3): 258-260.
[17] Crow W, Ryu D. A new data assimilation approach for improving runoff prediction using remotely-sensed soil moisture retrievals[J]. Hydrology and Earth System Sciences, 2009, 13: 1-16.
[18] 刘昭,周艳莲,居为民,等. 基于集合卡尔曼滤波同化方法的农田土壤水分模拟[J]. 应用生态学报,2011,22(11):2943-2953. Liu Zhao, Zhou Yanlian, Ju Weimin, et al. Simulation of cropland soil moisture based on an ensemble Kalman filter[J]. Chinese Journal of Applied Ecology, 2011, 22 (11): 2943-2953. (in Chinese with English abstract)
[19] 王文,刘永伟,寇小华,等. 基于集合卡尔曼滤波和HYDRUS-1D模型的土壤剖面含水量同化试验[J]. 水利学报,2012,43(11):1302-1311. Wang Wen, Liu Yongwei, Kou Xiaohua, et al. EnKF and HYDRUS-1D based data assimilation experiments for improving soil moisture profile prediction[J]. Journal of Hydraulic Engineering, 2012, 43(11): 1302-1311. (in Chinese with English abstract)
[20] 陈鹤,杨大文,刘钰,等. 集合卡尔曼滤波数据同化方法改进土壤水分模拟效果[J]. 农业工程学报,2016,32(2):99-104. Chen He, Yang Dawen, Liu Yu, et al. Data assimilation technique based on ensemble Kalman filter for improving soil water content estimation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32 (2): 99-104. (in Chinese with English abstract)
[21] 黄健熙,武思杰,刘兴权,等. 基于遥感信息与作物模型集合卡尔曼滤波同化的区域冬小麦产量预测[J]. 农业工程学报,2012,28(4):142-148. Huang Jianxi, Wu Sijie, Liu Xingquan, et al. Regional winter wheat yield forecasting based on assimilation of remote sensing data and crop growth model with Ensemble Kalman method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(4): 142-148. (in Chinese with English abstract)
[22] 丁建丽,陈文倩,王璐. HYDRUS模型与遥感集合卡尔曼滤波同化提高土壤水分监测精度[J]. 农业工程学报,2017,33(14):166-172. Ding Jianli, Chen Wenqian, Wang Lu. Improving monitoring precision of soil moisture by assimilation of HYDRUS model and remote sensing-based data by ensemble Kalman filter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(14): 166-172. (in Chinese with English abstract)
[23] Ramos T B, Šimůnek J, Gonçalves M C, et al. Field evaluation of a multicomponent solute transport model in soils irrigated with saline waters[J]. Journal of Hydrology, 2011, 407(1): 129-144.
[24] 马欢,杨大文,雷慧闽,等. Hydrus-1D模型在田间水循环规律分析中的应用及改进[J]. 农业工程学报, 2011, 27(3): 6-12. Ma Huan, Yang Dawen, Lei Huimin, et al. Application and improvement of Hydrus-1D model for analyzing water cycle in an agricultural field[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(3): 6-12. (in Chinese with English abstract)
[25] Yao R, Yang J, Wu D, et al. Geostatistical monitoring of soil salinity for precision management using proximally sensed electromagnetic induction (EMI) method[J]. Environmental Earth Sciences, 2016, 75:1362.
[26] 余凡,李海涛,张承明,等. 多源遥感数据与水文过程模型的土壤水分同化方法研究[J]. 红外与毫米波学报,2014,33(6):602-607. Yu Fan, Li Haitao, Zhang Chenming, et al. Data assimilation on soil moisture content based on multi-source remote sensing and hydrologic model[J]. Journal of Infrared and Millimeter Waves, 2014, 33(6): 602-607. (in Chinese with English abstract)
[27] Houtekamer P, Mitchell H. Data assimilation using an ensemble Kalman filter technique[J]. Monthly Weather Review, 1998, 126: 796-811.
[28] Reichle R H, McLaughlin D B, Entekhabi D. Hydrologic data assimilation with the ensemble Kalman filter[J]. Monthly Weather Review, 2002, 130(11): 103-114.
[29] 刘继龙,马孝义,张振华,等. 土壤饱和导水率的多尺度预测模型与转换关系[J]. 水科学进展,2013,24(4):568-573. Liu Jilong, Ma Xiaoyi, Zhang Zhenhua, et al. Multi-scale prediction model and transformation relation of soil saturated hydraulic conductivity[J]. Advances in Water Science, 2013, 24(4): 568-573. (in Chinese with English abstract)
[30] Mitchell H, Houtekamer P, Pellerin G. Ensemble size, balance, and model-error representation in an ensemble Kalman filter[J]. Monthly Weather Review, 2002, 130(11): 2791-2808.
[31] 张生雷,谢正辉,师春香,等. 集合Kalman滤波在土壤湿度同化中的应用[J]. 大气科学,2008,32(6):1419-1430. Zhang Shenglei, Xie Zhenghui, Shi Chunxiang, et al. Applications of ensemble Kalman filter in soil moisture assimilation[J]. Chinese Journal of Atmospheric Sciences, 2008, 32(6): 1419-1430. (in Chinese with English abstract)
[32] Liu Q, Reichle R H, Bindlish R, et al. The contributions of precipitation and soil moisture observations to the skill of soil moisture estimates in a land data assimilation system[J]. Journal of Hydrometeorology, 2011, 12(5): 750-765.
Estimation of soil salinity by assimilating apparent electrical conductivity data into HYDRUS model
Yao Rongjiang1,2, Yang Jinsong1,2※, Zheng Fule1,3, Wang Xiangping1, Xie Wenping1, Zhang Xing1,2, Shang Hui4
(1.210008,2.224200,3.100049,4.224237,)
Accurate and real-time information on soil salinity is required to understand the evolution of soil salinization, to develop appropriate management strategies, and to implement practices to improve the soil productivity and ecological restoration. Therefore, describing the accurate process of soil salt transport is of great significance for the precise management of salt-affected soils. Using the proximal soil sensor (electromagnetic induction, type EM38) and ensemble Kalman filter (EnKF) method, this study investigated the feasibility of soil salinity estimation by assimilating 1-D hydrological model (HYDRUS-1D) and apparent electrical conductivity data measured by EM38. Soil sampling and periodical EM38 survey at 11 dates was performed in the experimental site, located in a marine-terrestrial interlaced area in north Jiangsu Province. Soil physical and chemical properties, groundwater attributes and meteorological data were also collected as driving data of assimilation systemduring November 2015 and October 2016. The inversion model relating apparent electrical conductivity to soil salinity was adopted as observation operator, and EnKF method was applied to HYDRUS-1D model to simulate soil salinity on the profile. This study also examined the sensitivity of simulation accuracy to ensemble number, error level and number of soil salinity observation data during assimilation procedure. The main conclusions included: 1) EnKF assimilation method improved the simulation accuracy of soil salinity on 0-1 m profile. In comparison with simulated value after EnKF assimilation and HYDRUS-simulated value, the root mean square error of EnKF assimilation value decreased and the NSE of EnKF assimilation value increased. This indicated that EnKF assimilation value was more accurate than the simulated value after EnKF assimilation, whereas the simulated value after EnKF assimilation was better than HYDRUS-simulated value; 2) The simulated value after EnKF assimilation was closer to the measured value than HYDRUS-simulated value, and the soil salinity adjustment of EnKF assimilation value was greater than those of simulated value after EnKF assimilation and HYDRUS-simulated value during the assimilation procedure. In general, the adjustment amount of soil salinity was small when the temporal dynamics of soil salinity was flat for EnKF assimilation, whereas drastic soil salinity dynamics resulted in the increase of adjustment amount, for instance the soil salt leaching in the rainy season, indicating the improvement of simulation accuracy. The difference between simulated value after EnKF assimilation and measured value varied from-0.137 to 0.227 g/kg, with an average of 0.097 g/kg, whereas the difference between HYDRUS-simulated value and measured value ranged between 0.082 and 0.437 g/kg, with an average of 0.289 g/kg. 3) Soil salinity assimilation was not sensitive to ensemble size, whereas the error level and number of observation data were sensitive to soil salinity assimilation. The EnKF simulation result of soil salinity for ensemble size 75 was similar to that for ensemble size 100, and no further improvement was observed when ensemble size increased to 75. Also, no further improvement occurred when the error level of observation data exceeded 10% during the EnKF assimilation. Generally, high error level and low involved number of observation data in the EnKF assimilation resulted in large deviation, and vice versa. The improvement of surface soil observation data to the simulation of deep soil salinity attenuated with the increase of soil depth, and the assimilation of deep soil salinity was more sensitive to the involved number of observation data than that of surface soil salinity. It was concluded that, using the ensemble Kalman filter method, the coupled application of HYDRUS model and apparent electrical conductivity data improved the simulation performance of soil salinity. This study provided an effective way for the prediction of large scale ecological processes using multi-source data and mechanism model. More efforts should be diverted to the integration and assimilation of multi-source data at larger scales, such as the proximally sensed data and remote sensing data, and the optimization of model parameter and observation data acquisition frequency.
soils; electrical conductivity; salinity; water flow and salt transport model; electromagnetic induction; data assimilation; ensemble Kalman filter
10.11975/j.issn.1002-6819.2019.13.010
S156.4;S271
A
1002-6819(2019)-13-0091-11
2018-12-27
2019-05-10
国家自然科学基金项目(41571223、U1806215);中国科学院南京土壤研究所“一三五”计划和领域前沿项目(ISSASIP1633);国家重点研发计划项目(2016YFC0501300、2016YFD0200303);江苏省重点研发计划(现代农业)子项目(BE2017337-3)
姚荣江,博士,副研究员,主要研究领域为多尺度土壤水盐运移过程模拟和调控理论与技术。Email:rjyao@issas.ac.cn
杨劲松,博士,研究员,博士生导师,主要从事土壤和水资源利用与管理。Email:jsyang@issas.ac.cn
姚荣江,杨劲松,郑复乐,王相平,谢文萍,张 新,尚 辉.基于表观电导率和Hydrus模型同化的土壤盐分估算[J]. 农业工程学报,2019,35(13):91-101. doi:10.11975/j.issn.1002-6819.2019.13.010 http://www.tcsae.org
Yao Rongjiang, Yang Jinsong, Zheng Fule, Wang Xiangping, Xie Wenping, Zhang Xing, Shang Hui.Estimation of soil salinity by assimilating apparent electrical conductivity data into HYDRUS model [J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(13): 90-101. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.13.010 http://www.tcsae.org
猜你喜欢
环境保护与循环经济(2021年7期)2021-11-02 08:10:54
西南石油大学学报(自然科学版)(2021年3期)2021-07-16 05:26:54
哈尔滨轴承(2020年1期)2020-11-03 09:16:22
中国奶牛(2019年10期)2019-10-28 06:23:36
石油地质与工程(2019年3期)2019-09-10 08:27:46
电子制作(2018年23期)2018-12-26 01:01:22
中国农业文摘-农业工程(2016年5期)2016-04-12 05:38:09
读者·校园版(2016年6期)2016-03-07 19:38:01
煤炭学报(2015年10期)2015-12-21 01:55:49
中国石油大学学报(自然科学版)(2015年2期)2015-11-10 06:08:16
