
斜置潜土逆转旋耕抛土仿真及试验
2019-08-23 02:32高建民刘兴达齐惠冬Lakhiar
农业工程学报 2019年13期
高建民,刘兴达,齐惠冬,I. A. Lakhiar
斜置潜土逆转旋耕抛土仿真及试验
高建民,刘兴达,齐惠冬,I. A. Lakhiar
(江苏大学现代农业装备与技术教育部重点实验室,镇江 212013)
斜置潜土逆转旋耕是一种新的旋耕方式,研究其抛土机理对于优化设计斜置潜土逆转旋耕机有重要意义。该文在LS-DYNA平台上建立了斜置逆转旋耕抛土SPH(smoothed particle hydrodynamics,即光滑粒子流体动力学方法)仿真模型,通过该模型对不同工况下的斜置潜土逆转旋耕抛土模拟仿真,得出了不同参数条件下斜置逆转旋耕时不同层的后抛土率,将相同条件下仿真得到的不同层的后抛土率和室内土槽试验得到的不同层的后抛土率进行了对比分析,验证结果表明,最大仿真误差为12.50%,最小仿真误差为0.20%,平均误差为3.09%。应用校正的仿真模型,以斜置角、前进速度、潜土深度以及刀辊转速作为试验的4个因素,并对每个因素取3个水平,以后抛土率为试验指标,进行了斜置潜土逆转旋耕抛土虚拟正交试验。采用极差分析法、方差分析法以及回归分析法对试验结果进行了分析,数据分析结果表明,影响后抛土率的主次顺序依次为潜土深度、斜置角、前进速度和刀辊转速,后两者对后抛土率影响不显著,并且得出了潜土深度、斜置角与后抛土率的数学关系模型。根据虚拟试验结果优化了斜置潜土逆转旋耕机物理样机并且进行了田间试验,田间试验结果表明,斜置潜土逆转旋耕成功解决了旋耕机支架和中央传动箱体潜土的难题,并且用R175标准旋耕刀达到了20 cm的耕深,实现了短刀大深耕。
农业机械;设计;试验;逆转旋耕;抛土;正交
0 引 言
深旋耕是目前耕作机械研究领域的一个热点和难点问题。国内外学者对深旋耕技术和理论进行了大量的探索。目前主要通过以下3种方式实现深旋耕:1)直接通过加大刀辊直径来增大耕深[1];2)双轴分层旋耕,通过前后设置2排刀辊,使前面的刀辊进行初次旋耕,再通过后面的刀辊再次旋耕实现深耕[2-3];3)潜土逆转旋耕,即通过刀轴沉入地表以下实现深耕[4]。夏晓东等根据土壤力学理论以及相关旋耕机设计理论和经验,通过适当增大旋耕机刀辊直径研发设计出中间传动的大耕深卧式正转旋耕机。虽然试验证明该旋耕机的耕深能够达到30 cm,但是存在机构庞大、耕作负荷大以及机具可靠性不高等问题[1]。目前市场上的双轴旋耕机后刀辊往往存在难以入土的问题,虽然朱松后续对双轴旋耕机进行了一系列研究并进行了一系列改进优化设计[3],但依旧存在后刀轴的轴座与土壤发生干涉而使得后刀轴不能沉入地下的问题,而且结构复杂笨重,耕深不稳定。潜土逆转旋耕是通过刀轴反转并且潜于地表以下的一种耕耘方式,目前存在传动箱和机架难以入土以及壅土等问题。
国内刘孝民等较早对潜土逆转旋耕的抛土过程进行了研究分析,对切削土壤的不同位置分别建立了潜土逆转旋耕时旋耕刀切削未耕地时的抛土模型和旋耕刀切削近地表土壤时的抛土模型,并通过土槽试验对抛土模型进行了验证[4]。Gao等通过室内土槽抛土试验,探讨不同耕深、前进速度以及刀轴转速下的逆转旋耕分层抛土机理[5],但是到目前为止,壅土以及刀轴和变速箱难以潜土仍是潜土逆转旋耕存在的最大问题[6-7]。
王国林等从降低能耗和提高耕作质量的角度,提出了斜置式旋耕的概念,即刀辊的旋转面与牵引拖拉机行驶方向成一偏角,通过刀滚斜置和旋耕刀的巧妙排列,实现土壤的高速有序无侧限撕裂破坏,达到节省耕作能耗的目的[8]。孔令德等针对斜置旋耕地表切痕问题,采用Turbo C语言开发了相应的仿真程序,并采用该程序仿真得出了斜置角度、机具牵引速度、刀辊转速以及旋耕刀的排列情况对地表切痕的影响[9-10]。高建民等对斜置旋耕刀的侧切刃的动态滑切条件进行了推导,对侧切刃动态滑切角给出了定义和计算表达式,并通过实例计算对比了国家标准下的旋耕刀在正置和斜置时的动态滑切角和静态滑切角。此外,还将斜置旋耕刀的动态滑切角表达式与旋耕刀的侧切刃曲线表达式统一于Riccati微分方程中[11]。丁为民等分别对正置和斜置时旋耕刀滑切角进行了研究分析,并通过旋耕刀滑切角的表达式得出正置旋耕是斜置旋耕的一个特例[12]。高建民运用Object ARX和MDT API在MDTS平台上开发出了三维仿真模型,分别对单把刀、单列刀以及整个刀辊切土的过程进行了仿真,揭示了斜置旋耕降能节耗的根本原因是被耕土壤的侧面约束被解除和土壤毁于拉[13]。2008年江苏大学高建民和江苏沃野机械制造有限公司合作研制成功斜置旋耕机并进行了田间试验,证明了斜置旋耕理论的正确性,但旋耕深度只有12 cm左右,还是属于浅旋耕。
考虑到斜置旋耕和潜土逆转旋耕各自的特点,本文提出斜置潜土逆转旋耕模式,在该模式下不仅可以使土壤毁于拉伸破坏,又能减少正置潜土逆转旋耕壅土量,还可能破解旋耕机支架和中央传动箱体难以潜土的难题,实现低能耗的短刀深旋耕。斜置潜土逆转旋耕抛土性能直接决定斜置潜土逆转旋耕机的壅土量,进而影响耕作能耗,因此,本文以斜置潜土逆转深旋耕抛土性能作为研究内容,为设计斜置潜土逆转旋耕机提供参考。
1 斜置潜土逆转旋耕工作原理

如图1b、1c所示,采用普通正置潜土逆转旋耕时有不少土壤会堵塞在机具的前面,造成壅土。相对而言,斜置潜土逆转旋耕时,刀辊在水平面内斜置,旋耕刀回转平面与机组前进方向成一偏角,机组前进速度可以分解为垂直轴向的速度V以及沿轴向的速度V,耕作时不仅可以使被切土壤侧面减少约束,还能使旋耕刀对在耕土壤有一个侧向力作用,如图1d所示,进而使土壤被撕裂,使更多的土壤拉伸破坏,抛向已耕地,并减少机具前面的壅土量。因此,斜置潜土逆转旋耕相对具有更好的碎土和抛土性能。
如图1e、1f所示,刀辊正置时,受底部土壤的约束,变速箱和两端轴侧支撑不能沉入地下,无法实现潜土耕作。和正置旋耕相比较,采用斜置潜土逆转旋耕的旋耕刀回转平面与机组前进方向成一偏角,可将变速箱以及两端轴侧支撑部分前方的土壤耕翻,保证变速箱以及两端轴侧支撑部分可以沉入地下,实现潜土耕作。
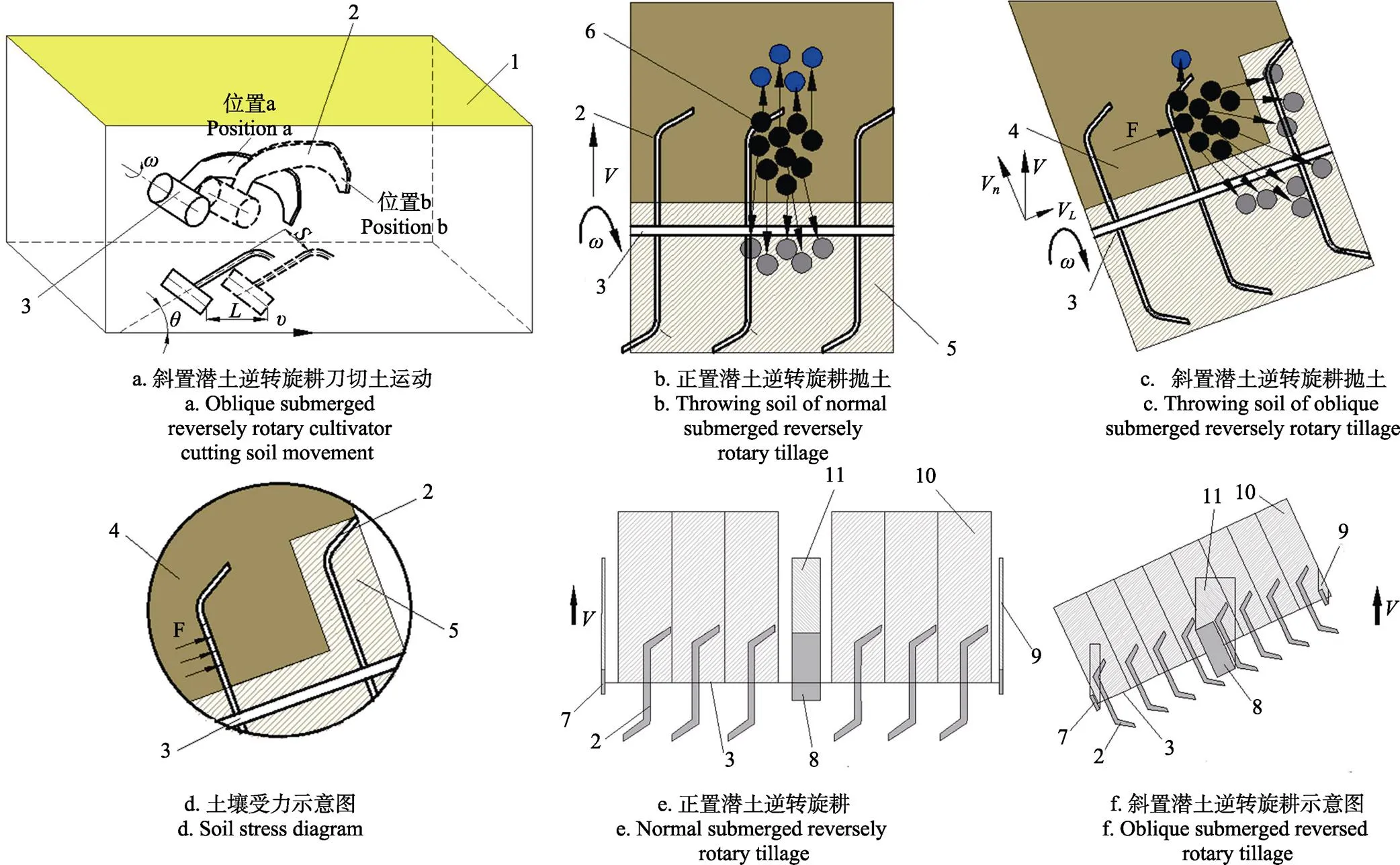
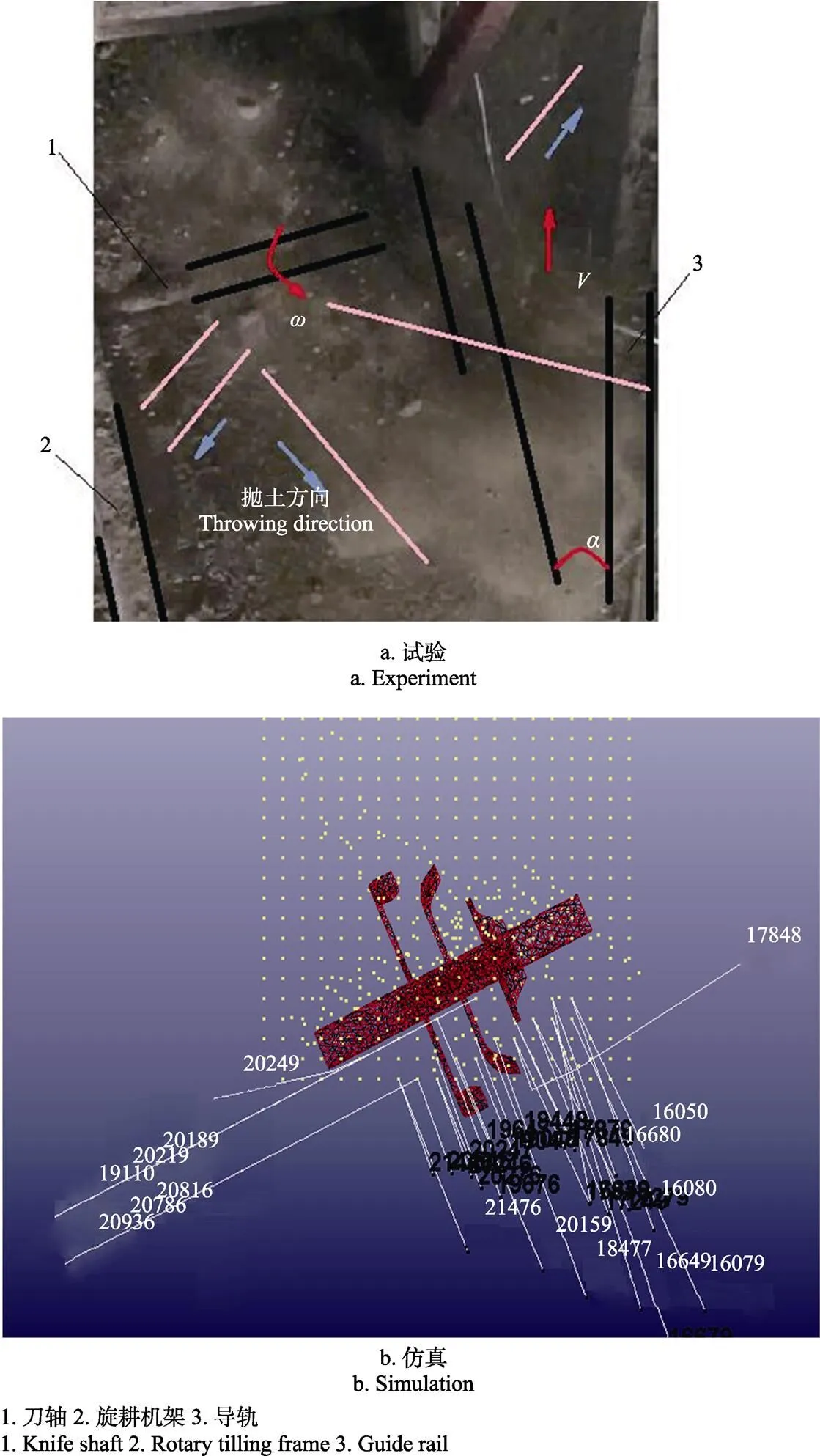
1.地表 2.旋耕刀 3.刀轴 4.未耕地 5.已耕地 6.被切土粒 7.机架 8.变速箱 9.机架行走轨迹 10.旋耕刀切土轨迹 11.变速箱行走轨迹
1. Field surface 2. Rotary cutter 3. Knife shaft 4. Uncultivated soil 5. Cultivated soil 6. Cutted soil particles 7.Frame 8. Gearbox 9. Traveling track of rack 10. Cutting track of rotary cutter 11. Traveling track of gearbox
注为斜置角;为刀轴前进距离;为侧向移动距离;为机具前速度;V为法向速度;V为轴向速度;为刀轴转速;为侧向力。
Note:is the oblique angle;is the advance distance of the knife shaft;is the lateral movement distance;is the forward speed of the machine;Vis the normal velocity; Vis the axial velocity;is the rotation speed of the knife shaft;is the lateral force.
图1 旋耕刀切土运动示意图
Fig.1 Diagram of rotary cultivator cutting soil movement
2 斜置潜土逆转旋耕抛土仿真与验证
2.1 仿真模型的建立与求解
为了揭示斜置潜土逆转旋耕抛土规律,采用LS-DYNA软件建立斜置潜土逆转旋耕的虚拟抛土仿真模型,为了使虚拟仿真中所采用的旋耕刀的外形轮廓与实际耕作中的旋耕刀一样,本文旋耕刀模型是通过三维扫描技术反求重构得到的国标R165旋耕刀单刀模型,并在单刀模型的基础上通过三维建模软件UG建模装配得到简化刀辊模型,为了确保刀辊能沿水平方向定向前进而不发生上下和左右跳动,在刀辊外设置一对导轨和套筒,将刀辊插入套筒内侧,套筒外侧和导轨连接。为了保证刀辊有足够的强度,刀辊材料设置为刚体*MAT_RIGID。最终建立的抛土仿真模型三维模型如图2所示,其参数如表1所示。

1. 套筒2. 刀轴3. 旋耕刀4. 导轨
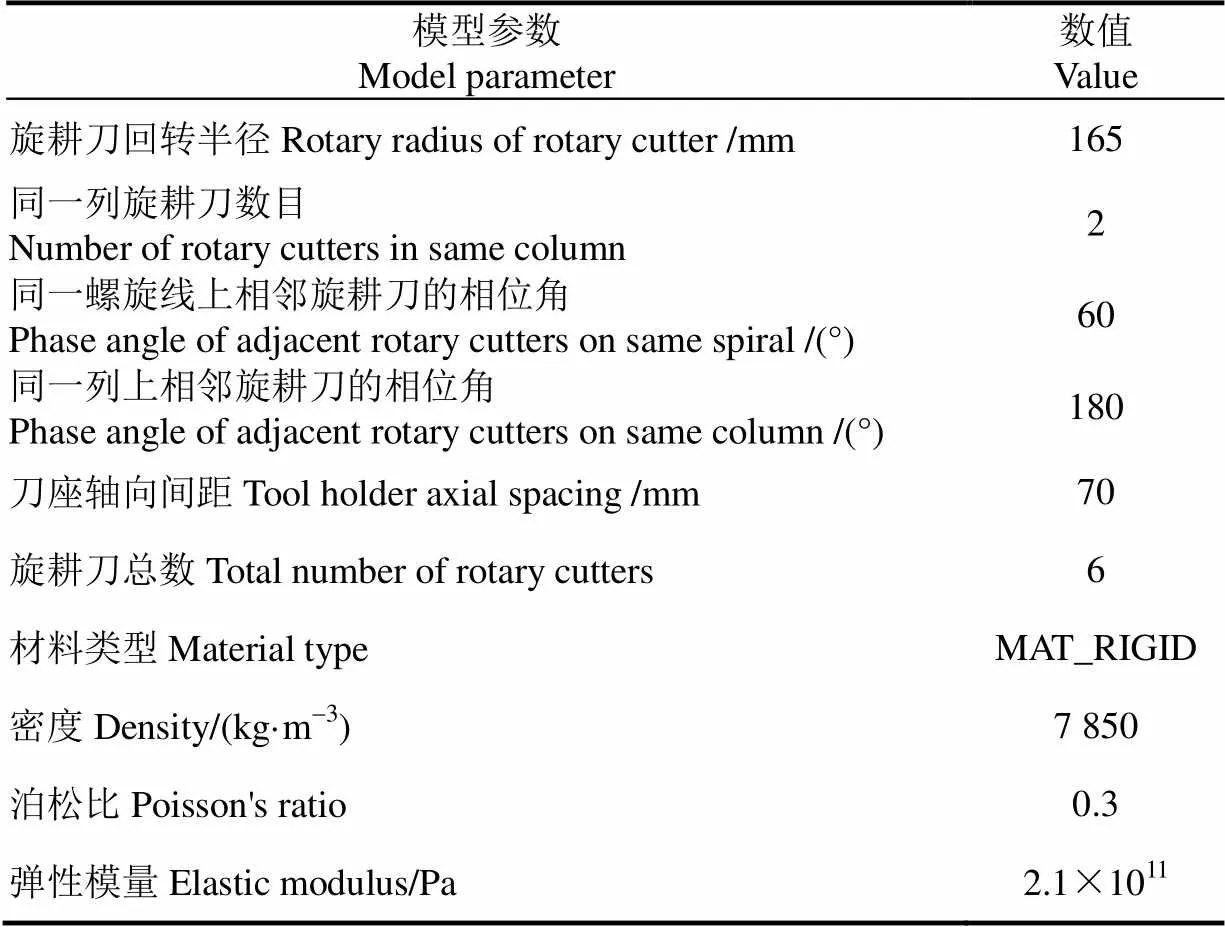
表1 抛土仿真三维模型参数
因ANSYS/LS-DYNA和三维建模软件UG之间具有共用的x-t文件格式,所以本文先将通过UG中建立好的刀辊模型保存为共用x-t格式,再通过通用格式直接导入到ANSYS/LS-DYNA,采用Lagrangian单点积分算法和四面体单元类型,并选用智能网格对刀辊划分网格,在ANSYS/LS-DYNA中设置SOILD164实体单元为刀辊单元类型。
相关学者用有限元法对土壤切削过程进行了模拟仿真[14-16],由于其中牵涉到的土壤是多相、松散的,土壤在被旋耕刀作用时发生的形变是非线性的,用有限元法和边界元法等连续体力学理论及其数值解法很难对其在旋耕刀高速作用下的破坏过程以及破坏后的运动状态进行描述。近年来用于对土壤动力学研究的离散元法被有关学者引入[17],该方法在研究颗粒运动、振动、破碎等离散度大、变形-流动显著的问题时有一定的优越性,但同时存在接触模型的近似性、仿真结果不够精确以及计算量大、计算时间费时等缺点,因此该种方法在理论和算法上还存在很大的局限性。
SPH(smoothed particle hydrodynamics,光滑粒子流体动力学)是一种无网格方法,这是一种纯拉格朗日方法,本质上不需要借助于网格,因而不存在网格畸变的问题,所以可以在拉格朗日格式下处理大变形问题。同时,SPH法允许存在材料界面,可以简单而精确地实现复杂的本构行为,也适用于材料在高加载速率下的断裂等问题的研究[18-19]。高建民等2007年率先在国内应用SPH开展了高速土壤切削的仿真研究[18],随后SPH逐渐成为国内研究土壤切削仿真的主要研究方法之一[20-32]。
本文建立土壤的SPH模型,结合有限元法对旋耕刀切削土壤过程进行数值仿真研究。考虑到仿真是在LS-DYNA系统里进行,土壤模型采用修正的Mohr-Coulomb模型(MAT_FHWA_SOIL)。土壤参数的测定是在在江苏大学农机实验室和土力学实验室完成的,通过应变控制式直剪仪(ZJ型四连剪,最大垂直载荷为400 kPa,最大水平剪切力为1.2 kN,南京土壤仪器厂有限公司)和应变控制式静力三轴仪(FSYL-30型,最大轴向载荷为30 kN,最大周围压力为2 MPa,江苏永昌科教仪器制造有限公司),测定了土壤的内摩擦角、土壤凝聚力剪切模量以及泊松比。土壤参数如表2所示。

表2 土壤模型主要参数
本文通过ANSYS将建立好的土壤三维模型进行网格划分,并以k文件格式导入到前后处理软件LS- PREPOST中,再采用LS-PREPOST软件中的SPH粒子生成功能将网格划分好的节点替换成SPH粒子,并对k文件中的程序设置进行一定修改。定义单向接触*ERODING_NODES_TO_SURFACE为刀辊和土壤的相互作用类型,并且设置刀辊为主动接触,土壤为被动接触。边界条件设为土壤底部和两侧固定。设置滑动界面惩罚因子为0.15,动摩擦因子为0.21及静摩擦因子为0.23,仿真时长设为1 s。本文建立的抛土仿真模型如图3所示。
采用上述调好的仿真参数,分别在前进速度为0.5 m/s时的不同斜置角、刀轴转速以及潜土深度的情况下进行虚拟仿真,并通过前后处理软件LS_PREPOST对模拟情况进行查看分析。通过对被切土粒进行轨迹跟踪,得到不同层土壤的后抛土率(向刀轴后面抛的粒子数占粒子总数的比),最终得到如表3所示的仿真结果。

1.导轨 2.土壤 3.旋耕刀 4.套筒 5.刀轴

表3 斜置潜土逆转旋耕虚拟抛土仿真结果
上述对仿真结果的统计分析表明,刀轴的潜土深度为5 cm,刀轴的旋转速度为300 r/min时,斜置角分别为0°、10°、20°时的后抛土率分别为31.13%、38.77%和54.57%,可以得出:斜置角的增大对提高后抛土率有很大影响;斜置角为10°,刀轴的旋转速度为300 r/min时,刀轴潜土深度分别为0、5、10 cm时的后抛率分别为24.03%、38.77%和53.53%,可以看出:刀轴潜土深度对后抛土率有明显的影响;斜置角为10°,刀轴潜土深度为5 cm时,刀轴转速分别为200、300、400 r/min时的后抛土率分别为32.40%、38.77%和39.33%,所以刀轴转速的增加对后抛土率影响不大。此外,各种工况下的仿真数据表明,相同条件下,上层的后抛土率均比中层和下层的后抛土率都高,中层的后抛土率又比下层的后抛土率高,即越靠近地表的土壤后抛率越大。
2.2 仿真模型校正
2.2.1 斜置旋耕试验台设计
为了验证仿真模型,本文在室内土槽进行了斜置潜土逆转旋耕的室内抛土试验。斜置旋耕试验台如图4所示,主要由承载小车、旋耕机架、电机、控制系统、传动系统、刀辊等组成,其中承载小车上设有行走轮和与牵引台车挂接的连接板,承载小车与安装在上面的旋耕机架都是型号为50 mm´50 mm´4 mm的方钢和厚16 mm的钢板焊接而成。旋耕机架上装有电机(Y100L-2,额定功率为3 kW,额定转速为2 880 r/min,上海韩奥电机有限公司)和配套使用的变频器,电机的转速大小由变频器控制,并采用带传动的方式使刀辊运动,其中与电机输出轴连接的带轮所选用的是外径为70 mm的B型2槽带轮,与刀辊轴连接的带轮所选用的是外径为210 mm的B型2槽带轮,即传动比为3:1,刀辊转速调速范围为100~466 r/min。为了使试验结果能跟仿真结果进行对比验证,刀辊参数与前文仿真的刀辊模型参数相同,并与安装在旋耕机架的轴承座(UCP206,广州磐固晟机械设备有限公司)连接。

图4 斜置旋耕试验台
将旋耕机架与承载小车连接部位设计成如图5所示,即承载小车安装连接板上分别在圆周间隔15°对称开有4个螺栓安装孔,而对应旋耕机架连接安装板上分别在圆周间隔10°对称开有4个螺栓安装孔,因此安装时,通过不同安装孔的组合安装,可以得到所需要的0°、5°、10°、15°、20°、25°、30°的斜置角。
2.2.2 室内抛土试验
试验时在土壤的不同深度埋不同颜色的粉笔对不同层土粒进行标定,即在旋耕底部上方2~3 cm处(下层)掩埋蓝色粉笔,在一半耕深处(中层)掩埋红色粉笔,在地表以下2~3 cm处(上层)掩埋黄色粉笔。其中每层掩埋40个粉笔,每个粉笔长2 cm左右。通过统计计算旋耕后被抛向后方的粉笔数占总数的比得到不同工况下旋耕的后抛土率。土槽土壤的整理主要分为3步,首先,对30 cm深的土槽土壤进行全面碎土;接着在不同深度掩埋相应颜色的粉笔,洒适量的水并压实;经一段时间直到试验泥土的干湿度达到旋耕试验要求,物理样机抛土试验结果如表4所示。

图5 斜置角调节结构示意图
为了验证仿真模型是否可靠,本文将试验时抛起泥土的运动趋势和仿真时土粒的抛洒情况进行分析对比。如图6所示的是在刀轴斜置角为10°、潜土深度为5 cm、刀轴转速为300 r/min情况下试验和仿真得到的抛土情况对比图。可知相同情况下的试验抛土趋势与仿真抛土趋势基本一致,进而初步验证了仿真模型的可靠性。
为了进一步对仿真模型进行验证,本文将相同条件下仿真得到的不同层的后抛土率(如表3所示)和试验得到的不同层的后抛土率(如表4所示)进行对比分析。分析结果如图7所示,试验所得出的上层、中层、下层以及平均后抛土率大致比仿真所得到的后抛土率高,最大仿真误差为12.50%,最小仿真误差为0.20%,平均误差为3.09%,说明仿真模型的精度可以满足抛土虚拟试验的要求。
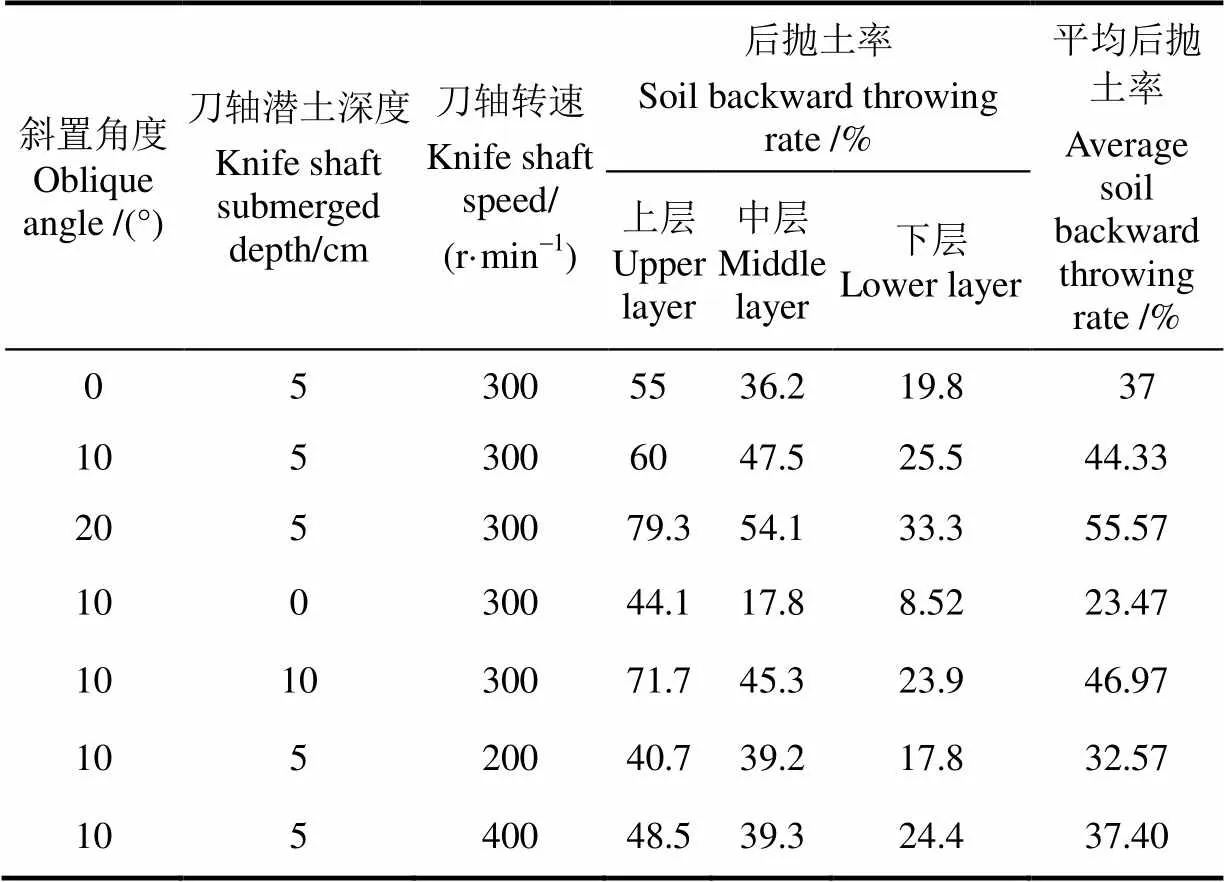
表4 抛土试验结果
注:刀轴斜置角为10°、潜土深度为5 cm、刀轴转速为300 r·min-1。
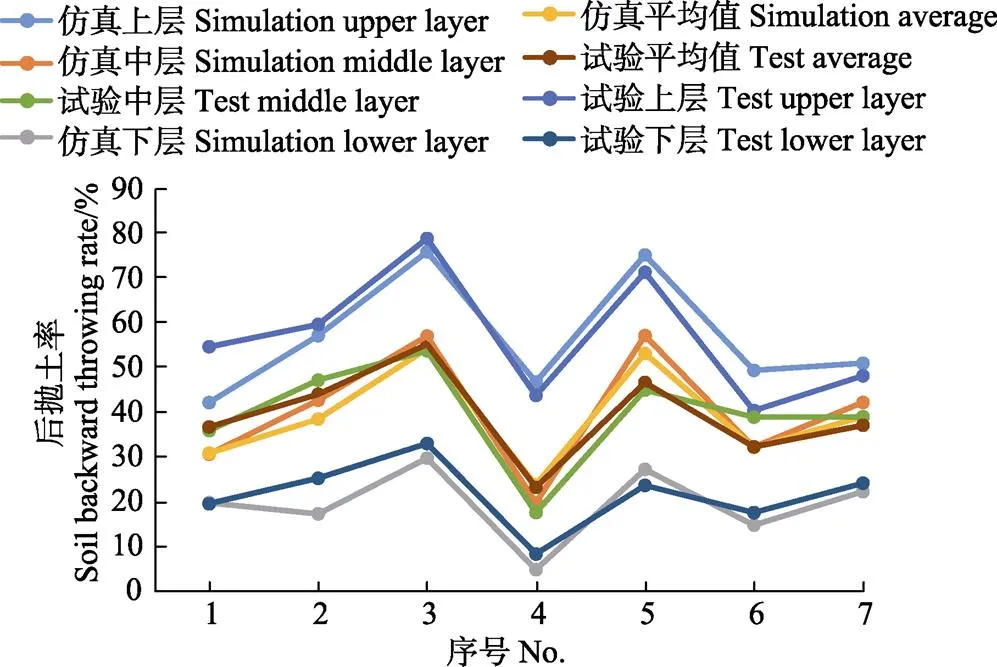
图7 仿真与试验对比结果
3 斜置潜土逆转旋耕抛土的虚拟正交试验与田间试验
鉴于通过物理样机试验研究斜置潜土逆转旋耕抛土不仅要花费较大的成本,而且试验周期也很长。因此,本文首先采用校正的ANSYS/LS-DYNA旋耕抛土虚拟仿真模型进行虚拟正交试验[33]。以斜置角、前进速度、潜土深度以及刀辊转速作为试验的4个因素,并对每个因素取3个水平,即斜置角的3个水平取0°、10°和20°;考虑到室内土槽的长度为15 m,从安全性角度和仿真数据的可验证性考虑,前进速度的3个水平取0.4、0.6和0.8 m/s;潜土深度的3个水平取0、5和10 cm;刀辊转速的3个水平分取200、300和400 r/min。试验因素水平表如表5所示。

表5 试验因素水平
3.1 试验结果与极差分析
为了数据的准确性,采用重复取样的方法,每次试验取3次。根据等水平正交试验表具有的性质,选用L9(34)正交表[34-35]。虚拟正交试验结果及极差分析如表6所示。
极差结果分析表明:影响后抛土率的因素从主到次的顺序依次为:潜土深度、斜置角度、刀辊转速、前进速度。在所有9个试验组合中,最优组合为3133,即当斜置角为20°,刀辊回转速度为400 r/min,潜土深度为10 cm以及前进速度为0.4 m/s时,后抛土率最大,即抛土效果最好。
3.2 试验结果的方差分析
虽然通过直观分析可以直观地得出各个因素对试验考察指标影响的主次顺序,但其不能得出各个因素对考察指标的影响是否显著。为了得到各个因素对考察指标的影响程度,对试验所得到的结果进行方差分析,方差分析结果如表7所示。

表6 虚拟正交试验结果及极差分析

表7 试验结果方差分析
由表7中的值可知:()=0.2,()=0.6都小于0.10(2,18)=2.62,所以因素(前进速度)和(刀辊转速)水平的改变对试验指标后抛土率没有显著影响,试验中的四个因素的主次地位依次为(潜土深度)、(斜置角)、(刀辊转速)、(前进速度)。
3.3 试验结果的回归分析
对试验数据的直观分析和方差分析虽然能够相对确定较好的试验因素组合,但它确定的较好的因素组合方式只能局限在已经确定好的因素水平上,却得不到所取范围内的最好组合,而对试验数据进行回归分析拟合的回归方程可以有效的对试验结果进行预测和优化。因此,本文对试验结果进一步采用回归分析。
采用数据处理软件Design Expert对表4所示的试验结果进行回归分析。因为前文方差分析表明,试验因素中的前进速度和刀辊转速对试验指标(后抛土率)没有显著性影响,所以回归分析时只考虑对试验考察指标有显著影响的因素(斜置角1,潜土深度2)。因此,对试验数据进行多元回归拟合,建立以土壤后抛率为响应值的多元回归方程,土壤后抛率符合二元一次模型。
=0.132 61+0.002 91+0.045 32(1)
由拟合方程(1)计算出的的预测值和试验值的关系如图8所示,其中相关系数2=0.989,表明后抛土率与斜置角和潜土深度的关系可以用方程(1)表示。

图8 后抛土率试验值和预测值的关系
从图8可以看出,采用该预测模型所得出的预测值与试验值非常接近,表明该模型适合试验因素与试验指标之间相关性的描述。因此,所得出的模型可以反映参数之间的真实关系,并且可以采用该模型对后抛土率进行预测和分析。
采用数据处理软件Design Expert绘制出试验因素(斜置角和潜土深度)和试验指标(后抛土率)的响应图如图9所示。

图9 后抛土率与斜置角和潜土深度响应图
根据图9可以得出,后抛土率随潜土深度和斜置角度的变大而增大,并且后抛土率随斜置角的增大趋势相对比随潜土深度的增大趋势小。此外,同时增加潜土深度和斜置角度可以有效提高后抛土率。
3.4 田间试验
根据抛土虚拟试验结论,设计制造了斜置潜土逆转旋耕机样机,其耕宽是3.15 m,斜置角度为17°,采用的旋耕刀为R175标准旋耕刀,田间试验于2017年4月15日在江苏省盐城市树东农场进行,如图10所示。试验时以东方红LX1204轮式拖拉机为牵引拖拉机。本文参考GB/T5668-2008旋耕机试验方法,测得旋耕机有效耕深为20 cm,旋耕机支架和中央传动箱成功潜入地下,实现了短刀大耕深。

图10 田间试验现场
4 结 论
1)运用ANSYS/LS-DYNA软件,结合SPH算法,建立了斜置潜土逆转旋耕仿真虚拟样机仿真模型,并且通过室内土槽试验对该模型进行了验证,验证的结果表明最大仿真误差为12.50%,最小仿真误差为0.20%,平均误差为3.09%。
2)正交试验设计的极差分析的结果表明:当斜置角为20°,刀辊回转速度为400 r/min,潜土深度为10 cm以及前进速度为0.4 m/s时,后抛土率最大,即抛土效果最好。影响后抛土率的因素从主到次的顺序依次为:潜土深度、斜置角度、刀辊转速、前进速度。潜土深度和斜置角对后抛土率影响显著,而前进快慢和刀辊回转速度对试验指标的影响不显著。
3)加工制造出了斜置潜土逆转深旋耕机的物理样机,并进行了田间试验。田间试验结果表明,斜置潜土逆转旋耕解决了旋耕机支架和中央传动箱体潜土的难题,并且用R175标准旋耕刀达到了20 cm的耕深,实现了短刀大耕深,表明斜置潜土逆转深旋是一种有前途的深旋耕方法。
[1] 夏晓东,乔富舜. 加大耕深型正转旋耕机研究设计初探[J]. 农业工程学报,1999,15(1):69-72.
[2] 李永磊,宋建农,康小军,等. 双辊秸秆还田旋耕机试验[J]. 农业机械学报,2013,44(6):45-49. Li Yonglei, Song Jiannong, Kang Xiaojun, et al. Experiment on twin-roller cultivator for straw returning[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(6): 45-49. (in Chinese with English Abstract)
[3] 朱松. 秸秆全量还田大耕深双轴分层切土旋耕机的设计与性能试验[D]. 扬州:扬州大学,2015.
[4] 刘孝民,桑正中. 潜土逆转旋耕抛土研究[J]. 农业机械学报,1996,27(4):40-44.
[5] Gao J M, Qi H D. Soil throwing experiments for reverse rotary tillage at various depths, travel speeds, and rotational speeds[J]. Transactions of the ASABE, 2017, 60(4): 1113-1121.
[6] Shibusawa S, Kawamura N. Studies on deeper rotary tillage, 2: Field test, 1: Tilling patterns and tilling reaction force. [J]. Journal of the Society of Agricultural Machinery, 1981, 43(2):181-187.
[7] Shibusawa S, Kawamiura N. Studies on deeper rotary tillage. III. Field test II tilling load characteristics and analysis of throwing tilled soil[J]. Nogyo Kikai Gakkai shi = Journal of the Society of Agricultural Machinery, Japan, 1982, 44(1):9-16
[8] 王国林,王新忠,桑正中. 斜置式旋耕研究初探[J]. 农业机械学报,1998,29(增刊1):17-21.
[9] 孔令德,孔海旺. 斜置旋耕地表切痕仿真研究[J]. 太原科技大学学报,1999,20(3):218-223.
[10] 孔令德,陕建平. 斜置旋耕过程理论分析[J]. 机械工程与自动化,2000,1(1):1-3.
[11] 高建民,桑正中. 斜置旋耕刀侧切刃曲线的理论研究[J]. 农业机械学报,2001,32(2):24-26. Gao Jianmin, Sang Zhengzhong. A study on lengthwise edge-curve of oblique rotary tiller blade[J]. Transactions of the Chinese Society for Agricultural Machinery, 2001, 32(2): 24-26. (in Chinese with English Abstract)
[12] 丁为民,徐志刚,汪小函. 斜置旋耕刀滑切角及其方程[J]. 农业工程学报,2002,18(3):49-53. Ding Weimin, Xu Zhigang, Wang Xiaohan. Grass sliding cutting angles and their equations of oblique rotary blades[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2002, 18(3): 49-53.
[13] 高建民. 基于MDT平台的斜置旋耕工作过程仿真研究[C]// 2002农业工程青年科技论坛论文集. 北京:2002:77-81.
[14] 夏俊芳,贺小伟,余水生,等. 基于 ANSYS/LS-DYNA 的螺旋刀辊土壤切削有限元模拟[J]. 农业工程学报,2013, 29(10):34-41. Xia Junfang, He Xiaowei, Yu Shuisheng, et al. Finite element simulation of soil cutting with rotary knife roller based on ANSYS/LS-DYNA software[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(10): 34-41. (in Chinese with English Abstract)
[15] 蒋建东,高洁,赵颖娣,等. 基于ALE有限元仿真的土壤切削振动减阻[J]. 农业工程学报,2012,28(增刊1):33-38. Jiang Jiandong, Gao Jie, Zhao Yingdi, et al. Numerical simulation on resistance reduction of soil vibratory tillage using ALE equation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(Supp.1): 33-38. (in Chinese with English Abstract)
[16] 丁峻宏,金先龙,郭毅之,等. 土壤切削大变形的三维数值仿真[J]. 农业机械学报. 2007,38(4):118-121. Ding Junhong, Jin Xianlong, Guo Yizhi, et al. Study on 3D numerical simulation for soil cutting with large deformation[J]. Transactions of the Chinese Society for Agricultural Machinery, 2007,38(4):118-121. (in Chinese with English Abstract)
[17] 熊平原,杨洲,孙志全,等. 基于离散元法的旋耕刀三向工作阻力仿真分析与试验[J]. 农业工程学报,2018,34(18):113-121. Xiong Pingyuan, Yang Zhou, Sun Zhiquan, et al. Simulation analysis and experiment for three-axis working resistances of rotary blade based on discrete element method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(18): 113-121. (in Chinese with English Abstract)
[18] 高建民,周鹏,张兵,等. 基于光滑粒子流体动力学的土壤高速切削仿真模型开发及试验[J]. 农业工程学报,2007,23(8):20-26. Gao Jianmin, Zhou Peng, Zhang Bing, et al. Development and test of high speed soil-cutting simulation system based on smooth particle hydrodynamics[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2007, 23(8): 20-26. (in Chinese with English Abstract)
[19] 朱留宪,杨玲,杨明金,等. 基于光滑流体动力学的土壤切削仿真研究[J]. 中国农机化学报,2014,35(4):274-277. Zhu Liuxian, Yang Ling, Yang Mingjin, et al. Simulation research of soil cutting based on smoothed particle hydrodynamics [J]. Journal of Chinese Agricultural Mechanization, 2014, 34(4): 274-277. (in Chinese with English Abstract)
[20] 郝建军,于海杰,赵建国, 等. 楔形减阻旋耕刀设计与试验[J]. 农业工程学报,2019,35(8):55-64. Hao Jianjun, Yu Haijie, Zhao Jianguo, et al. Design and test of wedge drag reduction rotary blade[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(8): 55-64. (in Chinese with English Abstract)
[21] 李云伍,张国勇,张植,等. 低功耗小型立轴式深耕机分段螺旋旋耕刀具的研制[J]. 农业工程学报,2019,35(4):72-80. Li Yunwu, Zhang Guoyong, Zhang Zhi, et al. Development of low power- consumption multi-helical rotavator for small vertical-shaft deep-cultivator[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(4): 72-80. (in Chinese with English Abstract)
[22] 马跃进,王安,赵建国,等. 基于离散元法的凸圆刃式深松铲减阻效果仿真分析与试验[J]. 农业工程学报,2019,35(3):16-23. Ma Yuejin, Wang An, Zhao Jianguo, et al. Simulation analysis and experiment of drag reduction effect of convex blade subsoiler based on discrete element method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(3): 16-23. (in Chinese with English Abstract)
[23] 李根峰,申向东,邹欲晓,等. 风沙冲蚀与碳化耦合作用下风积沙粉体混凝土耐久性能[J]. 农业工程学报,2018,34(17):158-166. Li Genfeng, Shen Xiangdong, Zou Yuxiao, et al. Durability of aeolian sand powder concrete under mechanism of aeolian sand blowing erosion and carbonization[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(17): 158-166. (in Chinese with English Abstract)
[24] 熊平原,杨洲,孙志全,等. 旋耕刀三向工作阻力试验及作业参数优化[J]. 农业工程学报,2017,33(19):51-58. Xiong Pingyuan, Yang Zhou, Sun Zhiquan, et al. Experiment on three-axis working resistances of rotary blade and working parameters optimization[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(19): 51-58. (in Chinese with English Abstract)
[25] 杨望,张栩梓,杨坚,等. 木薯收获机土薯抖动分离装置性能仿真及试验[J]. 农业工程学报,2017,33(16):18-25. Yang Wang, Zhang Xuzi, Yang Jian, et al. Simulation and test on performance of soil-cassava jitter separation device of cassava harvester[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(16): 18-25. (in Chinese with English Abstract)
[26] 康建明,李树君,杨学军,等. 圆盘式开沟机作业功耗仿真分析及试验验证[J]. 农业工程学报,2016,32(13):8-15. Kang Jianming, Li Shujun, Yang Xuejun, et al. Experimental verification and simulation analysis on power consumption of disc type ditcher[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2016, 32(13): 8-15. (in Chinese with English Abstract)
[27] 潘君廷,马俊怡,郜天磊,等. 膨润土改善鸡粪厌氧消化产酸产甲烷特性[J]. 农业工程学报,2016,32(8):246-252. Pan Junting, Ma Junyi, Gao Tianlei, et al. Improving production characteristics of methane and organic acid during anaerobic batch digestion of poultry manure by adding bentonite[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(8): 246-252. (in Chinese with English Abstract)
[28] 杨望,李晓月,王蓉蓉,等. 木薯块根拔起的最大应力数值模拟及试验[J]. 农业工程学报,2016,32(6):58-64. Yang Wang, Li Xiaoyue, Wang Rongrong, et al. Numerical simulation test of maximum stress of tuber incassava lifting[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(6): 58-64. (in Chinese with English Abstract)
[29] 顿国强,陈海涛,李昂,等. 刀齿排布旋向对免耕覆秸精播机清秸单体性能的影响[J]. 农业工程学报,2015,31(12):48-56. Dun Guoqiang, Chen Haitao, Li Ang, et al. Effect of rotation direction of knife teeth configuration on clearing straw unit performance for no-tillage and straw mulching precision seeder[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(12): 48-56. (in Chinese with English Abstract)
[30] Mehrez Bashar, Yang Zhou, Li Jun, et al. Achievements in modeling of energy requirements for tillage tool[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(9): 58-65. Mehrez Bashar,杨洲,李君,等. 耕作机具能耗模拟研究进展(英文)[J]. 农业工程学报,2014,30(9):58-65.
[31] 杨望,蔡敢为,杨坚,等. 木薯块根拔起力的力学模型和数学模型分析[J]. 农业工程学报,2011,27(11):95-100. Yang Wang, Cai Ganwei, Yang Jian, et al. Mechanical and mathematical model analysis of uprooted force on cassava storage root[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(11): 95-100. (in Chinese with English Abstract)
[32] 钟江,蒋建东,姜涛,等. 基于光滑粒子流体动力学仿真的板结土壤深旋耕技术[J]. 机械工程学报,2010,46(19):63-69. Zhong Jiang, Jiang Jiandong, Jiang Ta, et al. Deep-tillage rotavator technology based on smoothed particicle hydrodynamics simulation[J]. Journal of Mechanical Engineering, 2010,46(19):63-69. (in Chinese with English Abstract)
[33] 姜同川. 正交试验设计[M]. 济南:山东科学技术出版社,1985.
[34] 邱轶兵. 试验设计与数据处理[M]. 合肥:中国科学技术大学出版社,2008.
[35] 葛宜元. 试验设计方法与Design-Expert软件应用[M]. 哈尔滨:哈尔滨工业大学出版社,2015.
Simulation and experiment of soil casting during oblique submerged reversely rotary tillage
Gao Jianmin, Liu Xingda, Qi Huidong, I. A. Lakhiar
(212013,)
Deep rotary tillage is a hot and difficult problem in the research field of tillage machinery. Scholars at home and abroad have made a lot of explorations on deep rotary tillage technology and theory. At present, deep rotary tillage is mainly realized through the following three methods: 1) plowing depth was increased by directly increasing the diameter of the knife roller; 2)Two-axis stratified rotary tillage. Two rows of knife rollers are set in front and back for the first rotary tillage of the former one, and then the latter one for further rotary tillage; 3) subsoil reverse rotary tillage, that is, deep tillage is achieved by sinking the knife shaft below the surface. These three methods can achieve the goal of deep rotation tillage, but they all have their own disadvantages. Considering the characteristics of oblique rotary tilling and reverse tilling, the principle of oblique submerged reverse rotary tillage is put forward in this paper, which can not only destroy the soil by “pull” but also reduce the heaping soil as well as make the central transmission box easy to sink subsoil, and realize low energy consumption deep tilling with short knife. The back-up amount of tilting rotary tilter directly depends on the performance of tilting rotary tilter. Oblique submerged reverse rotary tillage is put forward in this paper. It is important to study the mechanism of throwing soil to optimize the design of this machine. Oblique submerged reverse rotary tillage is a new type of rotary tillage. It is important to study the mechanism of throwing soil to optimize the design of inclined subterranean reversal rotary tiller. In this paper, a simulation model of SPH (Smoothed Particle Hydrodynamics) is established on the LS-DYNA platform. The model is used to reverse the rotary tillage in different working conditions. The simulation results show that the post-soil rate of different layers in the reverse rotation of different parameters under different parameters is obtained. The post-soil rate of different layers obtained under the same conditions and the post-casting of different layers obtained by the indoor soil trough test are obtained. The soil rate was compared and analyzed. The verification results show that the maximum simulation error is 12.50%, the minimum simulation error is 0.20%, and the average error is 3.09%. Applying the corrected simulation model, the oblique angle, the forward speed, the depth of the submerged soil and the speed of the cutter roll were taken as the four factors of the test, and three levels were taken for each factor. Afterwards, the throwing rate was measured and the tilt was set. The virtual orthogonal experiment of reversing the rotary tillage and throwing soil was conducted. The test results were analyzed by the range analysis method, the variance analysis method and the regression analysis method. The data analysis results show that the primary and secondary order of the impact rate after the impact is the subsoil depth and the oblique angle, the forward speed and the knife roll speed. The influence on the post-lost rate is not significant, and the mathematical relationship model of the subsoil depth, the oblique angle and the post-lost rate is obtained. According to the results of virtual experiment, the physical prototype of the inclined submersible soil reverse rotation tillage machine was optimized and the field experiment was carried out. The field test results showed that the reverse rotation of the inclined subterranean soil successfully solved the problem of the rotary tiller bracket and the central transmission box. And with the R175 standard rotary cultivator, the tilling depth of 20 cm was achieved, and deep tilling using short knife was realized in this paper.
agricultural machinery; design; experiments; oblique reversely rotary tillage; throwing soil; orthogonal
10.11975/j.issn.1002-6819.2019.13.006
S225. 71
A
1002-6819(2019)-13-0054-10
2018-08-26
2019-06-21
江苏省农业科技自主创新基金(CX(18)3048);国家重点研发计划(2017YFD0700101);国家自然科学基金(No.51275214);江苏高校优势学科建设工程资助项目(苏财教(2011)8号)
高建民,研究员,博士,主要从事耕作机械和雾化耕作研究,2010-2011年由教育部公派赴美国农业部研究院农业工程应用技术国家实验室研修(USDA/ARS)。Email:1000001903@ujs.edu.cn
高建民,刘兴达,齐惠冬,I.A. Lakhiar.斜置潜土逆转旋耕抛土仿真及试验[J]. 农业工程学报,2019,35(13):54-63. doi:10.11975/j.issn.1002-6819.2019.13.006 http://www.tcsae.org
Gao Jianmin, Liu Xingda, Qi Huidong, I. A. Lakhiar. Simulation and experiment of soil casting during oblique submerged reversely rotary tillage [J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(13): 54-63. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.13.006 http://www.tcsae.org
猜你喜欢
快乐学习报·教育周刊(2022年16期)2022-05-01
中学生数理化·七年级数学人教版(2020年11期)2020-12-14
装备维修技术(2020年5期)2020-11-20
农民致富之友(2020年17期)2020-06-19
福建基础教育研究(2019年6期)2019-05-28
农民致富之友(2019年12期)2019-05-22
科技与创新(2019年3期)2019-02-19
农机使用与维修(2019年12期)2019-01-06
农民致富之友(2017年11期)2017-06-20
农家顾问(2014年5期)2014-06-26
