
级联式三相交错并联Boost变换器控制策略研究*
2019-08-22 01:35:12林巨广陈松波
汽车技术 2019年8期
林巨广 陈松波
(合肥工业大学,合肥 230009)
主题词:永磁同步电机 级联系统 交错并联 Boost变换器 负载电流前馈
1 前言
永磁同步电机因其体积小、功率密度大、转矩密度大等诸多优点,已广泛用于电动汽车领域。在传统电机控制器直流侧前置Boost变换器,可提高母线电压选择灵活性,降低永磁同步电机低速转矩脉动,提高电机转折转速和驱动系统控制效率[1-2]。
在前置Boost变换器后的级联式电驱动控制系统中,当负载电流发生剧烈变化时,若Boost变换器控制系统不能及时响应,将导致母线电压产生较大波动,继而影响整个驱动系统的安全性。文献[3]~文献[7]针对单相DC/DC变换器,建立了相应的小信号模型,并提出了抑制母线电压波动的控制策略,但整个设计过程不适用于多相变换器。文献[8]、文献[9]研究了多相交错并联DC/DC变换器的电感设计方法,提出交错并联结构,其中耦合电感交错并联结构有效降低了变换器输出电压纹波和多相变换器对滤波电感体积的需求。文献[10]~文献[12]和文献[13]分别采用双相和三相交错并联变换器,但其在变换器控制系统设计过程中均将电机负载视为恒值电阻,仅采用双闭环的形式对其进行控制,而当负载电流发生变化时,母线电压则会出现较大波动。
文献[14]研究了耦合电感的两相DC/DC变换器建模及其控制方法,提出可通过解耦,将耦合电感等效为独立并联电感,故本文只研究采用独立电感的三相交错并联Boost变换器建模及其控制方法。由于电容和电感的寄生参数很小,所以在建模过程中为了简化理论分析,通常将其忽略[15-16]。因此,本文从系统角度出发,在忽略输出电容和输入电感寄生参数的前提下,通过状态变量重构,建立三相交错并联Boost变换器的小信号数学模型,进而提出基于负载电流和电压偏差值前馈的双闭环控制策略,并通过仿真和试验将该控制策略与目前常用的多相交错并联Boost变换器控制策略[10-13]进行对比分析,证明本文所提出控制策略的有效性。
2 三相交错并联Boost变换器小信号模型建立
2.1 Boost变换器状态平均模型
本文所述前置三相交错并联Boost变换器的永磁同步电机驱动系统拓扑结构如图1所示,该系统主要用于新能源汽车的电驱动系统。采用该拓扑结构不仅可以降低变换器输出电压纹波、电感电流纹波和变换器体积,还可以将其复用为车载充电机。Boost变换器部分同相的绝缘栅双极型晶体管(Insulated Gate Bipolar Transistor,IGBT)上、下桥臂互补导通,相邻两相的IGBT移相120°导通。电池电压为Vg,负载电流为iload,变换器输出电压为V。

图1 前置三相交错并联Boost变换器的永磁同步电机驱动系统
首先,定义第n相IGBT导通和关断的二值逻辑开关函数为:

由基尔霍夫电压定律,可建立第n相回路的电压方程为:
整理得:

式中,L为各相电感;iLn(t)为某时刻第n相电感的电流;iL(t)为某时刻三相电感电流之和,即。
根据基尔霍夫电流定律,建立高压侧电容正极节点方程为:

式中,C为输出电容值。
根据状态空间平均法,对于由电阻、电容、电感(RLC)元件、独立电源和周期性开关组成的原始电路,可以用各电路状态在完整周期的平均值描述其对电路的影响。变量x(t)在一个开关周期T内的平均值为:

采用状态空间平均法,对Sn、SniLn进行均值化处理,得其在第m个周期内的平均值为:
2.2 三相均流控制的变换器小信号分析
由于总电感电流控制方式不能对每相电感的电流精确地进行均流控制,在DC/DC变换器实际工作中,将导致电感电流均值产生偏差。一方面,过电流最大的一相电感可能饱和,造成变换器损毁;另一方面,各相IGBT的寿命将出现差异,长期过电流最大的一相将最先损坏,降低系统总体寿命。
为了克服总电感电流控制方式的不足,采用各相电感电流独立控制各相IGBT占空比且相邻2相IGBT移相120°导通的方式,实现各相均流控制。对整个系统来说,虽然采用均流控制相比于总电感电流的控制方式增加了2个电流传感器,但其可以有效避免总电感电流控制方式存在的缺点,提高系统总体寿命。
假设在变换器稳态运行的某一时刻,第n相(n=1,2,3)电感电流和占空比出现扰动,而其余2相电感电流和占空比仍旧维持在稳态值,根据式(4)、式(5),系统的状态方程可以描述为:
式中,d′为上桥臂占空比的稳态值;iL为iL(t)的稳态值。
将上式各状态变量分解为直流分量和微小扰动之和,从而进行小信号分析,令

将式(11)分别带入式(9)、式(10),消去直流分量和二次项分量,并对其进行拉普拉斯变换,即可得到该相的小信号模型:
忽略电池电压扰动,并对式(12)、式(13)进行整理,可得:
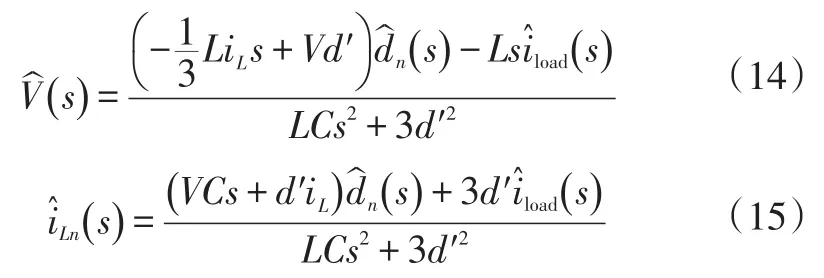
因此有:
式中,GVdn(s)为第n相占空比与变换器输出电压间的传递函数;GViload(s)为负载电流与变换器输出电压间的传递函数;GiLndn(s)为第n相占空比与第n相电感电流间的传递函数;GiLniload(s)为负载电流与第n相电感电流间的传递函数。
由式(16)~式(19)可知,只需实时抵消负载电流变化对输出母线电压的影响即可维持母线电压的稳定。
理论上,只需设计出合理的前馈表达式G(s),并且采用外环作为对母线电压进行控制的电压环、内环作为对电感电流进行控制的电流环的双闭环控制与负载电流前馈相结合的控制策略,即可完全消除负载电流对母线电压波动的影响。但受整个控制系统稳定性的影响,电流内环PI参数不能过大,否则将会导致电流内环响应速度出现一定的延迟,当负载电流变化剧烈时,母线电压仍会出现较大波动。因此,本文提出如图2所示的负载电流前馈与电压偏差前馈相结合的前馈控制策略,通过将电压偏差值前馈,来增大电压参考值和输出母线电压真实值之间的偏差,从而加快系统响应速度,既可实现对三相电流的均流控制,又可有效抑制负载电流波动对母线电压的影响。其中:电压外环的PI输出为电感电流的指令值;电流内环的PI输出为占空比;G(s)为前馈通道补偿环节传递函数;WV(s)、Wi(s)分别为对电压偏差、负载电流进行低通滤波的二阶低通滤波器的传递函数。

图2 三相交错并联Boost变换器均流控制模型
3 变换器均流控制系统设计三相交错并联
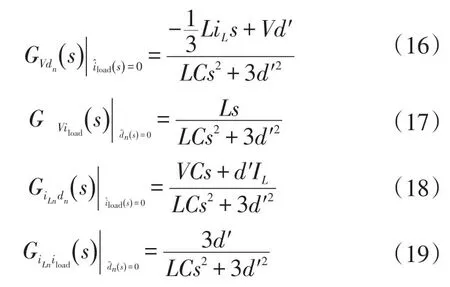
DC/DC变换器设计参数如表1所示。
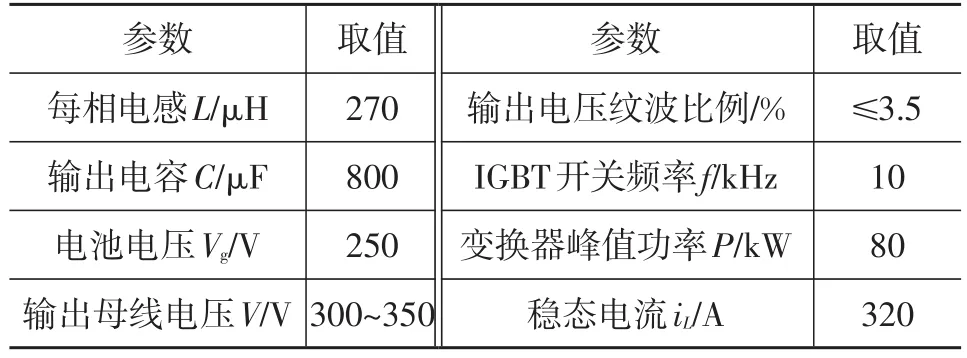
表1 变换器设计参数
3.1 电流环PI补偿器设计
三相交错并联变换器中第n相电流环结构如图3所示。未加PI补偿环节时,第n相电流环的开环传递函数见式(18),其Bode图如图4所示,由图可知其幅值裕度和相位裕度均为正,该闭环系统具有稳定性,但此时内环带宽为205.4 kHz,抗干扰能力差。为增强系统的抗干扰能力,特增加PI调节器对系统的抗干扰能力进行补偿。根据香农采样定理,要不失真地复现模拟信号,采样频率不能小于模拟信号频谱中最高频率的2倍[17]。因此,为实现对电流均流的严格控制,三相电感电流采样频率选为20 kHz,设定电流环带宽为4 kHz左右。利用Simulink中的PI调节工具对电流环PI补偿器进行调节,最终得到补偿后电流环开环Bode图见图4,其比例调节系数Kp=0.019,积分调节系数Ki=7.93,幅值裕度和相角裕度为正,内环带宽为4.04 kHz,保证了电流环的快速响应特性和抗干扰能力[18]。
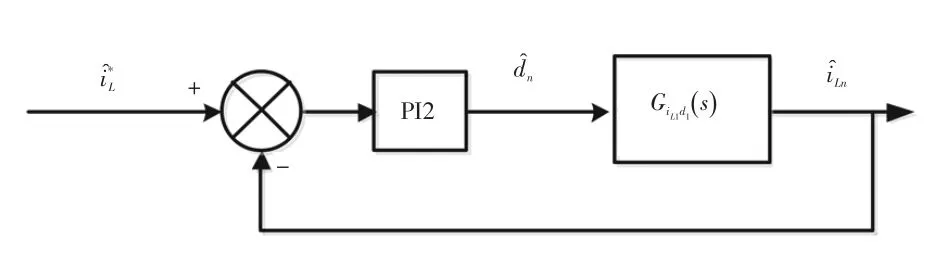
图3 第n相电流环结构

图4 电流环开环传递函数Bode图
3.2 电压环PI补偿器设计
由图2所示的三相交错并联Boost变换器均流控制模型可知,其电压外环控制结构如图5所示。在控制过程中,为避免电压外环与电流内环之间产生干扰,电压外环带宽需远小于电流内环带宽[18]。由Simulink中的PI调节工具对电压环PI补偿器进行调节,最终得到电压环开环Bode图如图6所示,Kp=0.63,Ki=891.72,幅值裕度为11.5 dB,相角裕度为61.2°,带宽为516 Hz,具有较好的动态响应和抗干扰能力。
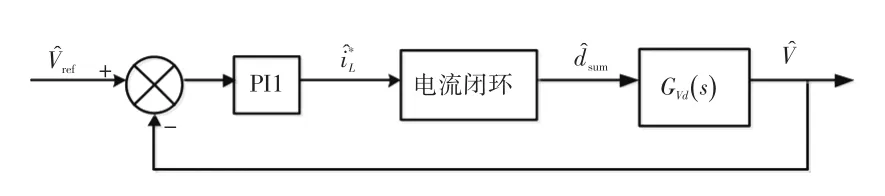
图5 电压环结构

图6 电压环开环传递函数Bode图
3.3 前馈通道补偿环节设计
为准确设计出前馈通道补偿环节传递函数G(s),根据图2所示的变换器控制模型建立负载电流到直流母线电压的传递函数为:

将式(16)~式(18)分别带入式(20)并化简得前馈通道补偿环节的传递函数为:

因此,引入前馈通道补偿环节G(s)后,负载电流到直流母线电压的传递函数为0。负载电流扰动对系统输出没有影响,整个系统稳定性仅与电压环和电流环设计相关,由3.1节和3.2节可知,该系统具有稳定性。所以,引入负载电流前馈后对系统稳定性没有影响。
3.4 前馈通道处二阶低通滤波器设计
为增强整个控制系统的抗干扰能力和稳定性,特在电压偏差前馈通道和负载电流前馈通道处分别加入二阶低通滤波器。
二阶低通滤波器的传递函数为:

式中,P为加权因子;;;f为截止频率;f为采样cs频率。
本文设fc=1 kHz,fs=20 kHz。经试验确定,电压偏差前馈通道处P=0.8,负载电流前馈通道处P=1。
4 仿真与试验验证
4.1 三相交错并联Boost控制策略仿真分析
基于Simulink建立如图1所示的前置三相交错并联Boost变换器的永磁同步电机驱动系统控制模型,变换器设计参数见表1,仿真和试验验证工况如表2所示。

表2 仿真和试验验证工况
使电机转速维持在6 000 r/min,在第0.3 s使电机输出功率突增至80 kW并维持一段时间,在第0.65 s,使电机输出功率突降至0,分别采用本文所述的控制策略和文献[14]所述控制策略进行仿真,得到的Boost输出电压波形如图7所示。

图7 采用2种控制策略的仿真结果
由图7可知,相较于文献[14]所述的三相交错并联Boost变换器控制策略,采用本文提出控制策略的Boost变换器输出电压具有更好的稳定性。
4.2 三相交错并联Boost控制策略试验分析
为验证本文所述控制策略的有效性,在图8所示的试验平台上对本文提出的控制策略和文献[14]所述控制策略进行对比试验。

图8 试验台架和三相交错并联Boost变换器样机
试验结果如图9所示。由图9可知:采用本文所述控制策略时,在永磁同步电机输出功率突增至80 kW和输出功率由80 kW突降至0两种情况下,直流母线电压均未发生突变;采用文献[14]所述控制策略时,永磁同步电机输出功率突增至80 kW时,变换器输出电压突陷25 V,输出功率由80 kW突降至0时,变换器输出电压突增5 V。所以,相较于文献[14]所述的控制策略,本文提出的控制策略能更好地抑制直流母线电压波动。
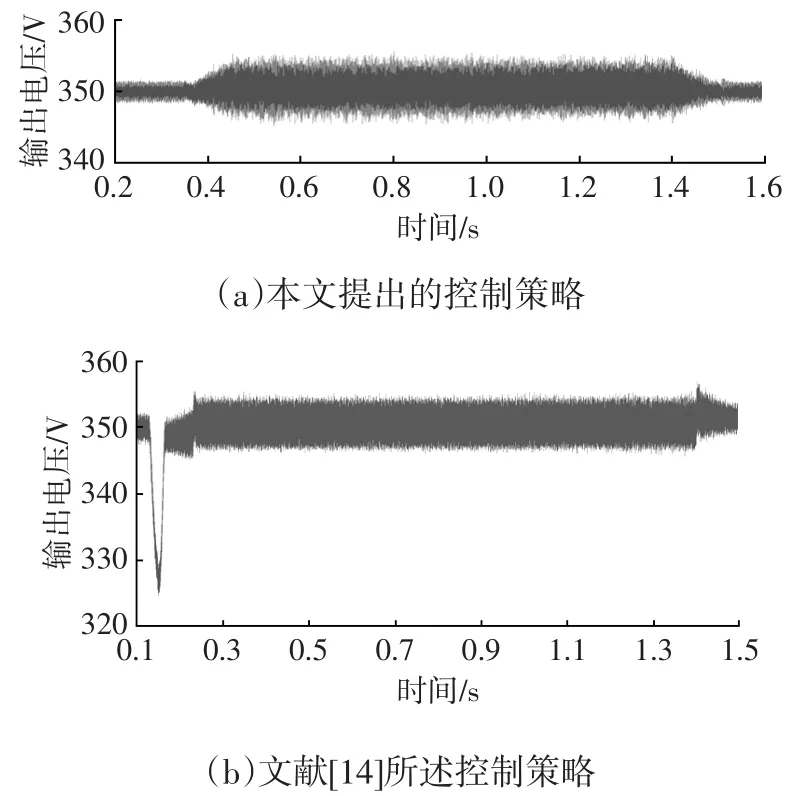
图9 采用2种控制策略的试验结果
5 结束语
本文对电机控制器直流侧前置的三相交错并联Boost变换器提出了一种基于负载电流和电压偏差前馈的双闭环控制策略。通过建立合理的级联式三相交错并联Boost变换器的小信号模型,设计出合理的前馈通道表达式,将负载电流前馈至电流内环的输入端,将变换器输出电压的参考值和变换器输出电压的实际值之间的偏差前馈至电压外环的输入端,提高了变换器的动态响应能力,有效抑制了电机负载突变对母线电压造成的影响。仿真和试验结果表明,本文的理论分析正确,提出的控制方法能有效抑制直流母线电压波动。
猜你喜欢
包装工程(2023年16期)2023-08-25 11:39:16
测控技术(2018年7期)2018-12-09 08:58:46
光学精密工程(2016年4期)2016-11-07 09:05:39
腹腔镜外科杂志(2016年12期)2016-06-01 12:10:09
腹腔镜外科杂志(2016年11期)2016-06-01 12:10:09
电测与仪表(2015年4期)2015-04-12 00:43:06
电测与仪表(2015年5期)2015-04-09 11:30:46
电测与仪表(2014年11期)2014-04-04 09:21:20
电机与控制应用(2013年9期)2013-11-21 08:00:04
城市道桥与防洪(2013年9期)2013-03-11 15:18:48
