
双车道公路驾驶人-车辆-弯道(环境)系统模型*
2019-08-22 01:35:18钱宇彬肖凌云王婉秋
汽车技术 2019年8期
钱宇彬 肖凌云 王婉秋
(1.上海工程技术大学,上海 201620;2.国家市场监督管理总局缺陷产品管理中心,北京 100101)
主题词:驾驶人-车辆-弯道(环境)系统模型 多目标模糊优选决策 非线性汽车动力仿真模型
1 前言
双车道公路弯道因其多样性以及驾驶行为的复杂性,往往成为事故的高发路段。双车道公路弯道的事故机理研究离不开对驾驶人-车辆-弯道(环境)系统模型的研究,而驾驶人的模糊感知、主观决策能力,以及极限状态下车辆的非线性动力学响应增加了系统模型建立和求解的难度。
关于驾驶人-车辆-弯道(环境)系统模型,国内外学者将研究重点集中于驾驶人模型。Prakash A.K.[1]根据驾驶人期望车速,采用人工神经网络方法确定油门踏板开度;Kiumars Jalali[2]采用前视范围内的多点预瞄模型,其中前视距离考虑了车速和驾驶人的反应时间,速度跟随模型基于驾驶人的期望车速采用PID控制策略;Renaud Deborne[3]考虑驾驶人手臂刚度特性和黏性特性,采用试验标定其范围,并通过不同参数组合分析其对侧向偏移的影响;Hsin Guan[4]以逼近于理想解(TOPSIS)的方法将驾驶人的模糊感知能力引入系统模型的建立;Dejun Zhuang[5]引用基于误差消除算法的人工神经网络方法寻求驾驶人的最优前视时间,车辆模型简化为2自由度模型。在这些研究中,部分学者将驾驶人的模糊感知能力引入模型,但未考虑驾驶人的主观特性,部分学者在轨迹跟踪模型中考虑了驾驶人前视时间随驾驶环境实时变化的特性,然而速度控制模型却以跟随期望车速为主,未考虑驾驶人随着前方道路信息动态确定速度的特性。文献[6]采用预瞄跟随策略,在引入驾驶行为控制因素的基础上,考虑驾驶人在决策中的模糊优选、主观特性,建立基于多目标模糊优选决策的驾驶人模型,并选择8处曲线路段标定和验证模型的有效性。模型假设驾驶人驾驶行为缓和,未出现高频操作行为,然而实际弯道环境中车辆以高速进入弯道或进入失稳状态之前,车辆的非线性动态响应对驾驶人驾驶行为的影响不容忽视。
本文在文献[6]工作的基础上,引入12个自由度的非线性汽车动力学分析模型(Vehicle Dynamics Analysis,NonLinear,VDANL),考虑纵向滑移和侧偏联合工况下轮胎的非线性特性,结合龙格-库塔(Runge-Kutta)法、牛顿下山法、插值型求导公式进行综合数值求解。然后结合弯道线形三维模型,建立驾驶人-车辆-弯道(环境)系统模型,基于迭代思想,提出系统误差补偿的计算方法。最后,基于微观的综合风险评价指标体系,选择仿真曲线段,研究警告标志、附着系数等弯道环境因素对行车稳定性和驾驶行为的影响。
2 驾驶人模型的建立
驾驶人模型采用预瞄跟随策略,跟随算法的关键是期望车速和相对最优圆弧轨迹。考虑驾驶人的模糊感知支撑着驾驶行为,期望车速和相对最优圆弧轨迹的决策过程为驾驶人的多目标模糊优选决策过程,将多目标模糊优选理论模型应用于期望车速和相对最优圆弧轨迹决策模型的构建。考虑驾驶人对目标集权重的确定随着驾驶环境的改变而动态变化,既具有客观性的一面,又包含驾驶人的主观感受,驾驶人对目标集权重的确定采用主、客观相结合的方法,其中客观权重方法采用灰色关联法,通过建立新的无量纲化方法,将驾驶人对目标特征值权重的主观感受融入客观权重的计算。其详细分析过程见文献[6]。
3 车辆非线性转向动力学模型建立
3.1 模型的选择
虽然涉及车辆动力学模型的商业软件已较为普及,但鉴于本文的研究重点是弯道驾驶环境的系统模型,车辆动力学模型应能模拟曲线行驶过程中的非线性状态,特别是失稳前车辆的动力学响应特征。本文采用VDANL[7-8],该模型能模拟侧翻极限状态下的汽车运动。整车运动自由度为12,如表1所示。

表1 车辆模型的自由度
该模型较为真实地反映了簧载质量与非簧载质量间的相互作用关系,及其对轮胎垂直载荷的影响。VDANL的轮胎模型(STIREMOD)为半经验公式模型[9-10],考虑了纵向滑移和侧偏联合工况下的轮胎非线性特性。将实际弯道线形参数(纵坡、竖曲线、超高、超高变化率)引入模型,建立实际弯道环境下的VDANL模型。模型形式复杂且具有非线性特征,结合Runge-Kutta法、牛顿下山法、插值型求导公式对模型进行综合数值求解,以提高模型的运行速度和精度。
3.2 运动微分方程
汽车平面受力模型、纵断面受力模型、侧面受力模型如图1~图3所示。

图1 汽车平面受力模型
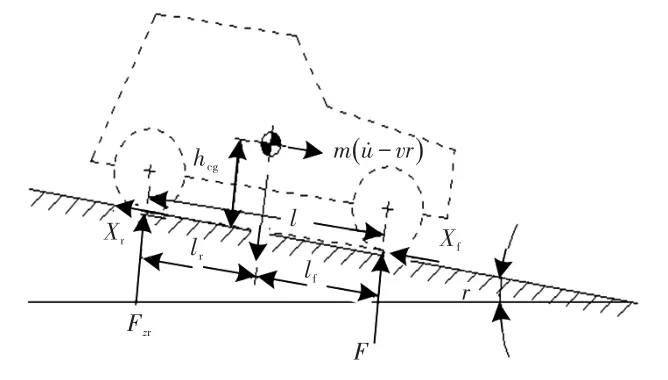
图2 汽车纵向受力模型
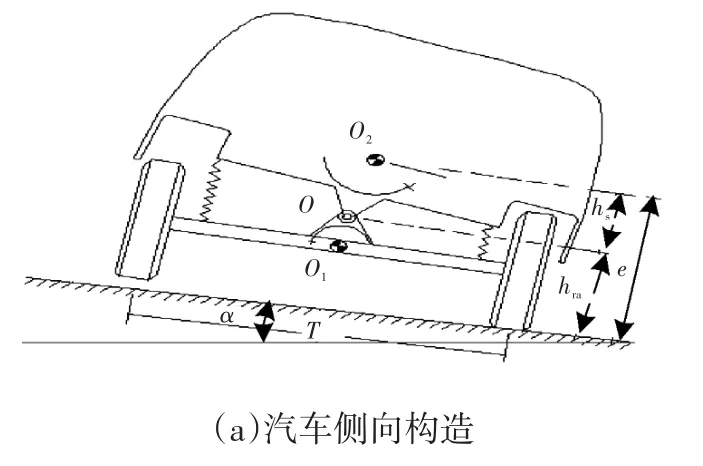

图3 汽车侧向受力模型
根据整车动力学模型,使用牛顿定理、达朗贝尔原理、动量和动量矩定理建立簧载质量运动微分方程组、非簧载质量运动微分方程组以及轮胎旋转运动微分方程组。
3.2.1 簧载质量运动微分方程组
沿X、Y轴的力平衡方程式分别为:
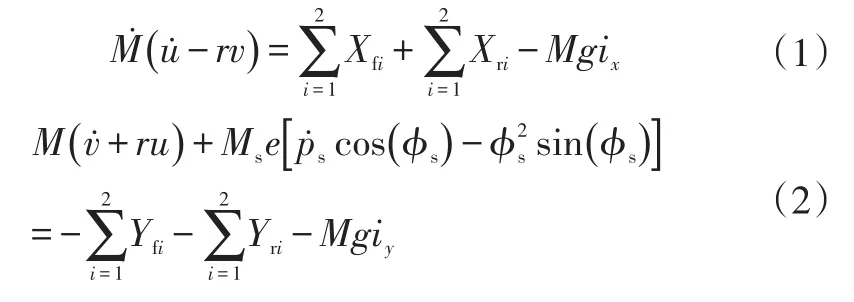
绕Z、X轴的力矩平衡式分别为:

式中,M为整车质量;Ms为簧载质量;u为汽车径向速度;v为汽车侧向速度;r为汽车横摆角速度;Xfi(i=1,2)、Xri(i=1,2)分别为前、后轴左右轮胎的侧偏力;Yfi(i=1,2)、Yri(i=1,2)分别为前、后轴左右轮胎的纵向力;ix、iy分别为道路纵向、横向坡度;g为重力加速度;e为簧载质量质心与侧倾轴的距离;ps为汽车簧载质量侧倾角速度;ϕs为汽车簧载质量侧倾角;Iz为整车质量绕过其质心z轴的转动惯量;Ixz为整车质量绕过其质心x、z轴的转动惯量积;Ixzs为簧载质量绕过其质心x、z轴的转动惯量积;Iys为簧上质量绕过其侧倾轴的转动惯量;lf、lr分别为整车质心距前、后轴距离;T为前、后轮距;ays为簧上质量侧向加速度;Zs为簧上质量竖直位移;Lsuspf、Lsuspr分别为前、后悬架作用于车体的力矩,由簧载质量和非簧载质量的侧倾角决定,并且考虑减振器的影响。
3.2.2 前、后轴非簧载质量运动微分方程组
绕过前、后轴非簧载质量质心的X轴的力矩平衡式为:

沿过前、后轴非簧载质量质心的Z轴的力平衡方程式为:
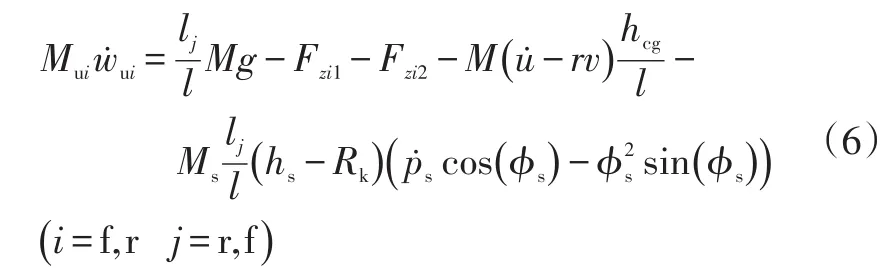
式中,Ixuf、Ixur分别为前、后轴非簧载质量绕过其质心X轴的转动惯量;puf、pur分别为汽车前、后轴非簧载质量侧倾角速度;ϕuf、ϕur分别为汽车前、后轴非簧载质量侧倾角;Fzf1、Fzr1分别为前、后轴左侧轮胎受到的垂直荷载;Fzf2、Fzr2分别为前、后轴右侧轮胎受到的垂直荷载;Fyf1、Fyr1分别为前、后轴左侧轮胎受到的侧向力;Fyf2、Fyr2分别为前、后轴右侧轮胎受到的侧向力;Rk为轮胎半径;hraf、hrar分别为前、后侧倾力矩中心高度;Muf、Mur分别为前、后轴非簧载质量;wuf、wur分别为汽车前、后轴非簧载质量垂直速度;hcg为整车质心高度;hs为簧载质量质心高度;Zuf、Zur分别为汽车前、后轴非簧载质量垂直位移。
3.2.3 轮胎回转运动力矩平衡方程
轮胎绕其中心轴回转运动力矩平衡方程式为:
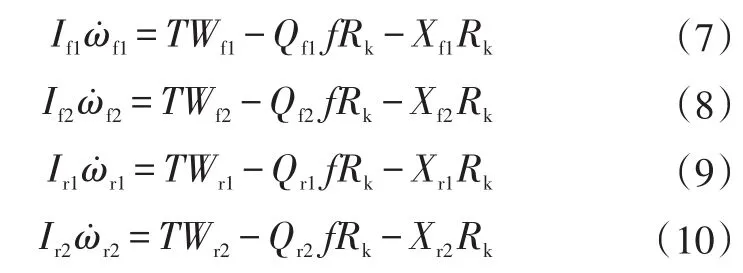
式中,If1、If2分别为前轴左、右轮胎转动惯量;Ir1、Ir2分别为后轴左、右轮胎转动惯量;ωf1、ωf2分别为前轴左、右轮胎的转动角速度;ωr1、ωr2分别为后轴左、右轮胎的转动角速度;TWfi、TWri(i=1,2)在驱动状态时表示各驱动轮的驱动力矩,而在制动状态时表示各轮的制动力矩,由汽车的实时纵向加(减)速度u̇反算得到;Qf1、Qf2分别为前轴左、右轮胎受到的垂直荷载;Qr1、Qr2分别为后轴左、右轮胎受到的垂直荷载;f为轮胎滚动阻力系数。
3.3 轮胎模型公式
STIREMOD考虑了轮胎侧偏角、滑移率、垂直载荷、轮胎气压、胎面宽度等因素,无量纲侧偏力Fy/μFz以及无量纲纵向滑移力Fx/μFz由总滑移率σ得到:

式中,Ks为轮胎纵向滑移刚度;Kc为侧偏刚度;f(σ)为力的饱和函数;β为质心处侧偏角;λ为纵向滑移率;μ为路面附着系数;Fx、Fy、Fz分别为轮胎受到的纵向力、侧向力、垂直荷载。
3.4 模型求解
运动状态变量包括各自由度的位移(角度)、速度(角速度)以及轮胎转动速度等20个变量,即X、Y、ψ、ϕs、Zuf、Zur、ϕuf、ϕur、u、v、r、ps、wuf、wur、puf、pur、ωf1、ωf2、ωr1、ωr2,其中X、Y分别为汽车在地面坐标系的横、纵坐标,ψ为汽车在地面坐标系的方位角。
位移(角度)状态变量的一阶导数为:

速度(角速度)和轮胎转动速度状态变量的一阶微分方程由VDANL通过一系列的向量运算、矩阵变换得到:

综合式(12)的位移(角度)状态变量的一阶导数信息,得到20维状态变量W的一阶微分方程:

20维状态变量的微分方程组求解涉及多个微分方程的联合求解,本文选用4阶Runge-Kutta法求解。形如dy/dx=f(x,y)的微分方程,其4阶Runge-Kutta法算法的递推公式为:

式中,h=xk+1-xk为区间值;k1=f(xk,yk)为点(xk,yk)处斜率;k2=f(xk+h/2,yk+hk1/2)、k3=f(xk+h/2,yk+hk2/2)分 别 为 点(xk+h/2,yk+hk1/2)及点(xk+h/2,yk+hk2/2)的斜率;k4=f(xk+h,yk+hk3)为点(xk+h,yk+hk3)的斜率。
递推公式包含区间[xk,xk+1]的导数信息k1、k2、k3、k4,由于式(13)中包含形如F=f(F)的非线性轮胎模型,导数信息k1、k2、k3、k4不能显示表达。因此,首先需求解形如F=f(F)的非线性方程,其数值求解方法采用牛顿下山法,以扩大初始值的选择范围,保证迭代收敛。
将F=f(F)变换为y(F)=F-f(F)=0,设定初始值F0,牛顿下山法公式为:

式中,λ为下山因子,0<λ≤1。
λ的选取可以采用逐次减半法,反复计算,直到|y(Fk+1)|<|y(Fk)|时,完成第k次迭代。将Fk+1作为下一次迭代初值Fk,进入第(k+1)次迭代,直到|Fk+1-Fk|<ε时,迭代计算结束,ε为迭代精度。
牛顿下山法存在求导运算y′(Fk),本文选用插值型求导公式,以提高运算速度。设3个节点x0=Fk、x1=Fk+h、x2=Fk+2h间距相等,其导数为:

4 系统驾驶人-车辆-弯道(环境)系统模型的建立与求解
4.1 模型的建立
在车辆行驶过程中,车辆模型产生的动力学状态实时反馈于驾驶人,驾驶人依据对行驶轨迹弧长l、横向力系数ud以及侧向偏移d进行实时主观判断,并结合前方影响区域的道路信息,对车速V和转向盘转角δf进行实时的模糊优选决策,产生新的指令输入车辆模型。驾驶人的驾驶决策行为和车辆动力学响应又与弯道环境(路面附着系数μ、视距VD、道路纵向坡度iy、道路横向坡度ix、曲率变化率CCR等)密切相关。驾驶人-车辆-弯道(环境)的系统模型如图4所示。

图4 驾驶人-车辆-弯道(环境)系统模型
4.2 系统模型的求解
驾驶人的补偿行为如图5所示,因驾驶人在系统中的反应滞后效应、车辆动态响应误差以及驾驶人对迟滞、速度误差和轨迹误差的补偿的计算较为复杂,本文采用牛顿下山法,以滞后时间Δt为仿真步长,通过不断迭代计算,使得车辆在Δt末的实际速度V和轨迹曲率1/R与预期值基本一致,以获得符合补偿要求的加速度a和转向盘转角δf。
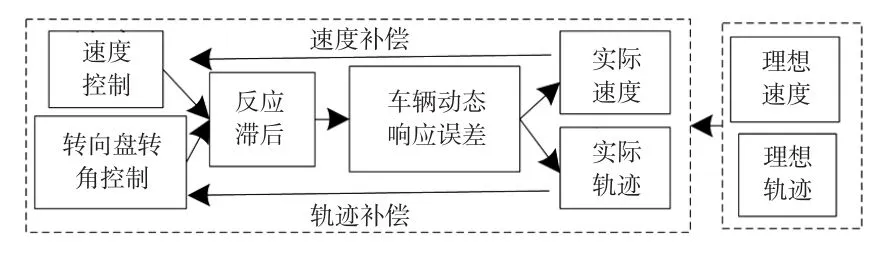
图5 驾驶人的补偿行为
5 弯道事故机理仿真分析
5.1 综合指标的建立
仿真分析可以获得驾驶人-车辆-弯道(环境)系统的微观指标,为从微观角度挖掘系统风险状态的演变过程创造了条件。系统风险状态的演变是微观指标综合作用的产物,通过分析,建立4类相互独立且与行车安全密切相关的指标体系。
5.1.1 轨迹跟踪优劣的误差指标JA
轨迹跟踪误差指标为:

式中,E(s)为车辆实际运行轨迹与理想轨迹的侧向偏移量;̂为轨迹误差标准值,取不设缓和曲线的内移值0.2 m。
方向误差指标为:

式中,A(s)为车辆实际运行轨迹的行驶方向角;φ(s)为理想轨迹方向角;̂为以设计车速匀速行驶的角度误差最大值。
5.1.2 驾驶人驾驶负荷指标JB
转向盘转角变化率为:

式中,δsw(s)为转向盘转角;为以设计车速匀速行驶的转向盘转角。
纵向加速度指标为:

式中,ay(s)为纵向加速度;。
5.1.3 侧翻危险性指标JC
横向力系数指标为:

式中,u(s)为横向力系数;为以设计车速匀速行驶的稳态横向力系数。
簧上质量侧倾角指标为:

式中,ϕ(s)为簧上质量侧倾角;̂为以设计车速匀速行驶的稳态簧上质量侧倾角。
5.1.4 前、后轴侧滑危险性指标JD
侧滑危险性指标为:
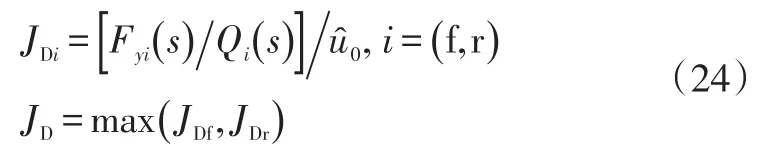
式中,JDf、JDr分别为前、后轴侧滑危险性指标;JD为整车侧滑危险性指标;为侧向附着系数;Qf(s)、Qr(s)分别为前、后轴所受的垂直荷载;Fyf(s)、Fyr(s)分别为前、后轴所受的侧向力。
指标体系涉及多层权重的确定,层次关系如图6所示,指标权重关系采用灰色关联法确定,由随里程变化的指标值组成的序列与母序列之间的关联度决定。

图6 综合指标体系
综合风险评价指标JT为:

综合风险评价指标沿道路里程的变化,从微观的角度揭示了行车风险状态的演变。
5.2 道路环境因素对行车安全的影响
仿真路段设计车速60 km/h,平曲线半径为240 m,前缓和曲线长Ls1=60 m,后缓和曲线长Ls2=60 m,平曲线总长L=270 m,横向坡度iy=5%,平曲线如图7所示,图中BP为路段起点,ZH为直缓点,即直线和前缓与曲线的连接点,HY为缓圆点,即前缓和曲线与圆曲线的连接点,YH为圆缓点,即圆曲线与后缓和曲线的连接点,HZ为缓直点,即后缓和曲线与直线的连接点,EP为路段终点,其对应的里程如图7所示。
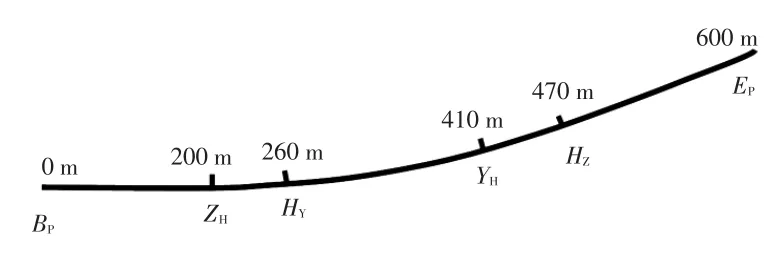
图7 试验路段曲线图
5.2.1 警告标志对行车安全的影响
假设进入曲线的视距为75 m,曲线视距刚好满足停车视距75 m。
考虑未设置弯道警告标志的道路环境,由于驾驶人对前方弯道环境信息的获取有限,车辆以高速(90 km/h)驶入曲线路段。当驾驶人发现前方道路线形为小半径曲线的瞬时,驾驶人的反应时间从t=0.5 s突变为t=1.31 s,其中0.5 s为驾驶人对前方视距不良曲线有一定预知情况下的反应时间,1.31 s为出人意料情况下驾驶人的平均反应时间[11]。由仿真结果可知,驾驶人在预警不足的条件下,面对视距不良的小半径曲线路段,由于反应时间的延长致使车辆行驶轨迹发生了严重的侧向偏移,车辆向曲线外侧偏离了2.85 m(见图8、图9),综合风险评价指标达到了8(见图10),相对于反应时间t=0.5 s的车辆行驶轨迹侧向偏移值0.52 m(见图8)、综合风险评价指标为3.5(见图10),驾驶人反应时间的延长加剧了高风险状态向事故形态的转化。

图8 驾驶反应时间为1.31 s和0.5 s时的侧向偏移对比
5.2.2 附着系数对行车安全的影响
由于驾驶人对路面附着系数的感知不如其对前方线形的感知直接,当路面附着系数较低时,驾驶人往往习惯性地采取与高附着系数路面下相同的驾驶行为。通过仿真分析可知,驾驶人高速进入缓和曲线之前存在预减速阶段,进入缓和曲线段后持续减速。针对附着系数低的弯道,本文提高缓和曲线以及缓和曲线前约30 m路段的路面附着系数,分析该措施在维持系统稳定方面的效果。

图9 驾驶反应时间1.31 s时的行驶轨迹

图10 反应时间1.31 s和0.5 s的综合指标随里程变化对比
假设车辆以初始速度80 km/h进入弯道,弯道附着系数μ设为0.3,将缓和曲线及其前30 m处路段的附着系数μ设置为0.8,仿真结果如图11~图13所示,由仿真结果可见,车辆顺利通过了小半径曲线。
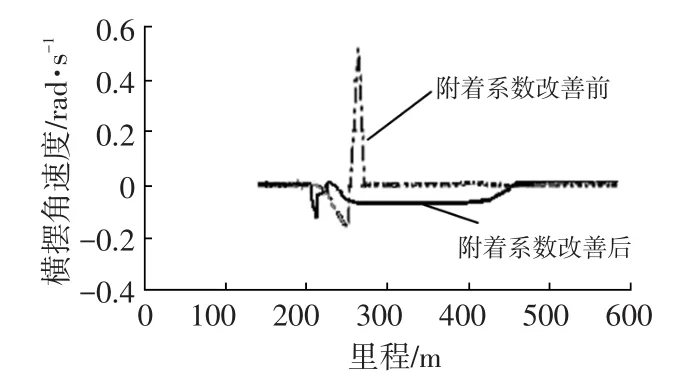
图11 附着系数改善前、后的横摆角速度对比
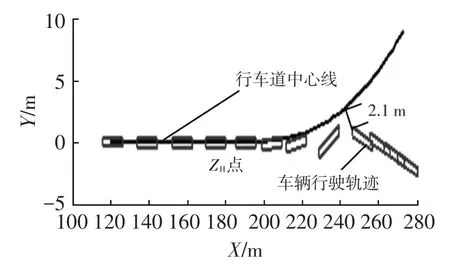
图12 附着系数改善前(μ=0.3)的轨迹侧向偏移示意
6 结束语
本文选用了12个自由度的非线性动力学仿真模型,运用Runge-Kutta法、牛顿下山法、插值型求导公式进行了综合数值求解。结合文献[6]的驾驶人模型、三维弯道线形模型,建立了驾驶人-车辆-弯道(环境)系统模型,研究了系统误差补偿的计算方法,建立基于微观的综合风险评价指标体系,选取半径为240 m的平曲线路段作为试验路段,模拟了警告标志设置与否、路面附着系数的局部改善对行车状态以及驾驶行为的影响。仿真结果表明,警告标志的设置及路面附着系数的局部改善可为规避弯道事故起到较好的效果。
猜你喜欢
资源信息与工程(2021年5期)2022-01-15 05:37:42
北京航空航天大学学报(2021年4期)2021-11-24 01:12:56
少儿科学周刊·少年版(2020年9期)2020-03-04 11:38:12
童话世界(2019年14期)2019-06-25 10:11:52
幼儿教育·父母孩子版(2017年12期)2018-02-28 16:33:59
光学精密工程(2016年3期)2016-11-07 09:03:52
通信电源技术(2016年1期)2016-04-16 04:57:35
西北工业大学学报(2015年1期)2016-01-19 03:29:56
橡胶工业(2015年4期)2015-07-29 09:17:24
橡胶工业(2015年4期)2015-07-29 09:17:02
