
五段式与七段式空间矢量脉宽调制下永磁同步电机高频噪声对比分析
2019-08-22 01:35:14林巨广谢涛辉
汽车技术 2019年8期
林巨广 谢涛辉
(合肥工业大学,合肥 230009)
主题词:五段式空间矢量脉宽调制 七段式空间矢量脉宽调制 永磁同步电机 高频噪声 阶次分析
1 前言
空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)适于在数字控制器中实现,且有输出电流波形好、直流环节电压利用率高等优点[1],广泛应用于电动汽车永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)的驱动控制。根据波形的合成方式,SVPWM可分为五段式和七段式。2种SVPWM的谐波在不同频率的分布不同,与五段式SVPWM相比,七段式SVPWM总谐波较低。驱动电机是纯电动汽车的动力核心[2],当其采用SVPWM控制时,若由电流载波及其谐波产生的高频电磁噪声较大,将严重影响整车舒适性。电机的型式以及极、槽配合不同,电流载波频率附近的高频电磁噪声的特性也不同[3],且此高频噪声与由电流载波及其谐波产生的径向电磁力的空间阶次和频率特性有关[4-5]。为探明五段式与七段式SVPWM对永磁同步电机以载波频率为中心频率的高频阶次噪声的影响,本文以纯电动汽车驱动用的8极48槽内转子永磁同步电机为研究对象,从理论上分析2种SVPWM的电流载波及其谐波产生的径向电磁力的时空特性,利用时步有限元法和二维傅里叶变换,对两者的径向电磁力进行仿真分析,并通过电机的振动噪声试验进行验证,以期为优化以载波频率为中心频率的阶次噪声提供参考。
2 电磁力时空特性分析
永磁同步电机采用SVPWM控制时,在载波频率及其整数倍频率附近的电流谐波分量会产生脉动的电磁力,导致电机振动并辐射噪声。由于电机的载波频率一般较高,在载波频率的整数倍频率附近产生的噪声,其频率已超出人耳的敏感频率范围,因此,本文主要研究载波频率附近的高频噪声。
对于内转子永磁同步电机,作用在定子齿表面的电磁力是电机振动噪声的主要来源。由于电磁力的切向分量幅值较小,一般只考虑径向分量对电机振动噪声的影响。根据麦克斯韦应力张量法,作用在定子表面的径向电磁力密度Pn为[6]:

式中,μ0=4π×10-7H/m为真空磁导率;bn(t,α)为气隙磁密;t为时间;α为空间角度。
对于整数槽永磁同步电机,径向电磁力波的次数可能为零或等于电机极数的整数倍[7],因此本文研究的电机的径向电磁力波空间阶数为0阶及8的整数倍阶。由于电机的振动噪声水平与电磁力的空间阶次的4次方成反比[8],本文只考虑空间阶数为0阶和8阶的径向电磁力波对电机振动噪声的贡献。
电机采用SVPWM控制时,三相电流的谐波分量有2部分:电流基频f1的(6k±1)(k为整数)倍谐波和与载波频率fc相近的频率为fc±4f1、fc±2f1、fc±f1、2fc±f1、2fc±5f1的谐波[4]。电流载波及其谐波引起的径向电磁力中,空间0阶、8阶电磁力分量包含的频率如表1所示[4]。
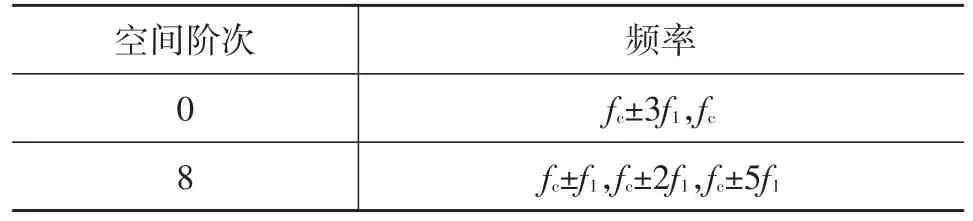
表1 空间0阶、8阶电磁力的频率分布
电动汽车驱动用永磁同步电机是常见的旋转机械,一般采用阶次分析方法分析其振动噪声。振动噪声信号的阶次O为信号频率与参考轴转动频率的比值:

式中,f为信号频率;n为参考轴转速。
电流基频与电机轴转频的比值为电机的极对数,将电机轴作为参考轴,由式(2)计算表1中的频率在中心频率为载波频率fc时对应的频率阶次,如表2所示。

表2 空间0阶、8阶电磁力的频率阶次分布
3 径向电磁力仿真分析
本文的研究对象是8极48槽永磁同步电机,其主要参数如表3所示。

表3 电机主要参数
在Simulink中搭建五段式与七段式SVPWM控制模型,对本文8极48槽电机在载波频率为10 kHz、转速4 000 r/min、转矩120 N·m工况下的电流进行仿真,U相电流在载波频率附近的幅频图如图1所示。由图1可知:电机采用五段式SVPWM控制时,由于绝缘栅双极型晶体管(Insulated Gate Bipolar Transistor,IGBT)有1/3时间处于全开或全关状态,电流在载波频率附近会产生最大幅值为5.6 A的谐波;电机采用七段式SVPWM控制时,由于IGBT每个脉冲宽度调制周期都有开、关2种状态,电流在载波频率附近的谐波幅值最大为2.3 A,相对较小。因此,与五段式SVPWM相比,电机采用七段式SVPWM控制时,由载波频率附近的电流谐波产生的径向电磁力相对较小,从而使载波频率附近的高频噪声减小。

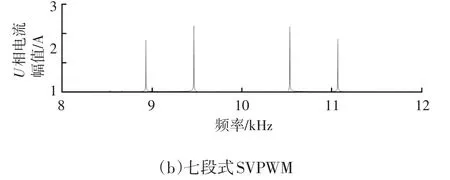
图1 U相电流幅频图
在Maxwell中建立电机的二维电磁模型,如图2所示,载波频率取10 kHz,将电机分别采用五段式与七段式SVPWM控制的实测电流作为电磁模型的激励,利用时步有限元法,对工况为额定转速4 000 r/min、转矩120 N·m的电机进行仿真,获得在时空上周期性分布的径向电磁力,如图3所示。
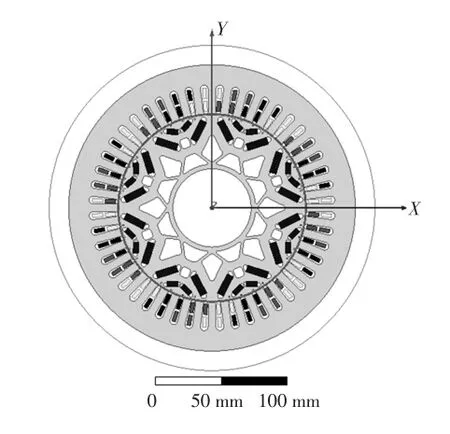
图2 电机二维电磁模型

图3 时空二维分布的径向电磁力
通过二维傅里叶变换对2种控制方式下的径向电磁力进行分解,得到空间0阶、8阶电磁力在载波频率附近的分布,如图4所示。电流进行实测时采样频率为25.6 kHz,由采样定理可知,在0~12.8 kHz频带内电流的频率不失真。采样定理只保证了信号不被歪曲为低频信号,但不能保证不受高频信号的干扰[9],因此实测的电流仍存在一定的误差。由图4可知,载波频率处径向电磁力分量的频率为10 133.3 Hz,与理论值相差1.333%,具有较高的仿真精度。
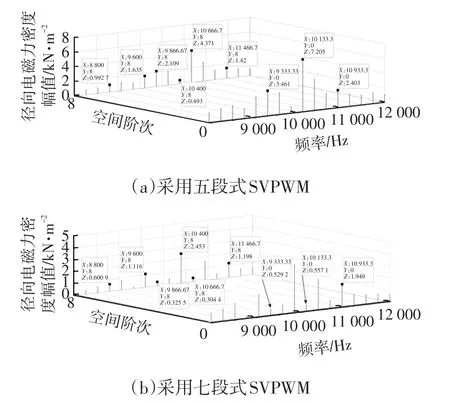
图4 径向电磁力的时空分解
以电机轴的转频为参考频率,载波频率为中心频率,将图4中的频率变换为对应的频率阶次,如图5所示。根据载波电流及其谐波产生的径向电磁力的时空特性,本文只分析五段式与七段式SVPWM对空间0阶,频率0阶、±12阶和空间8阶,频率±4阶、±8阶、±20阶的径向电磁力的影响。
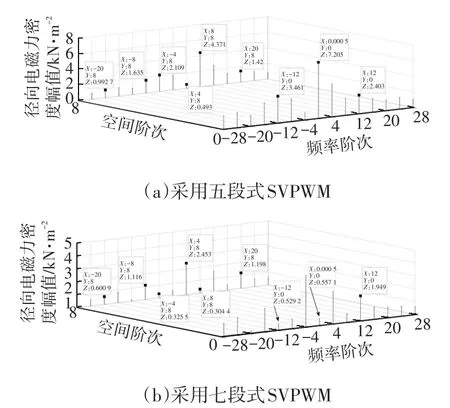
图5 径向电磁力的空间阶次与频率阶次分布
由图5可知,与采用五段式SVPWM相比,电机采用七段式SVPWM控制时,空间0阶的径向电磁力密度幅值在频率阶次为0阶、12阶、-12阶处分别降低6.648 kN/m2、0.454 kN/m2、2.932 kN/m2,空间 8 阶的径向电磁力密度幅值在频率阶次为-4阶、8阶、-8阶、20阶、-20阶处分别降低1.784 kN/m2、4.067 kN/m2、0.519 kN/m2、0.222 kN/m2、0.392 kN/m2,而在频率阶次为4阶时,径向电磁力密度幅值增大1.960 kN/m2。
因此,除空间8阶、频率4阶的电磁力外,电机采用七段式SVPWM控制能在一定程度上削弱其他各阶次的径向电磁力,且对空间0阶、频率0阶和空间8阶、频率8阶的径向电磁力削弱作用最大。
4 电机振动噪声测试分析
4.1 采用五段式SVPWM的电机振动噪声测试分析
本文采用米勒贝姆公司的数据采集设备对电机进行120 N·m加载、匀加速工况振动噪声测试。振动传感器布置在电机壳体上,麦克风与电机轴处于同一水平面,距离电机壳体表面20 cm,如图6所示。

图6 测试布置情况
电机采用五段式SVPWM控制,在加载、匀加速过程中,电机壳体法向振动加速度时频图和近场噪声A计权声压级时频图如图7所示。
由图7可知,电机在10 040 Hz处的振动噪声非常突出,频率值与理论值相差0.4%,这是由实际的控制误差引起的。以10 040 Hz为中心频率,电机存在的振动噪声阶次为0阶、±4阶、±8阶、±12阶、±20阶,与前文的理论分析结果一致。
4.2 采用七段式SVPWM的电机振动噪声测试分析
在相同的测试环境下,对采用七段式SVPWM控制的电机进行振动噪声测试,其壳体法向振动加速度时频图和近场噪声A计权声压级时频图如图8所示。
电机采用七段式SVPWM控制时,由图7a、图8a可知,4阶振动加速度幅值增大,0阶、8阶、-8阶振动加速度幅值减小,测试结果与前文的径向电磁力仿真结果有较好的一致性。由图7b、图8b可知,0阶、8阶、-8阶噪声优化效果明显。
电机分别采用五段式与七段式SVPWM控制的4阶、0阶、8阶、-8阶振动加速度对比如图9所示。由图9可知,在电机转速530~9 000 r/min范围内:采用五段式SVPWM控制时,4阶、0阶、8阶、-8阶振动加速度分别在8 876 r/min、3 373 r/min、3 421 r/min、3 321 r/min处达到峰值 2.22 m/s2、9.94 m/s2、4.49 m/s2、9.38 m/s2;采用七段式SVPWM控制时,4阶、0阶、8阶、-8阶振动加速度分别在6 546 r/min、1 296 r/min、7 521 r/min、7 521 r/min处达到峰值3.59 m/s2、1.77 m/s2、3.18 m/s2、1.43 m/s2。
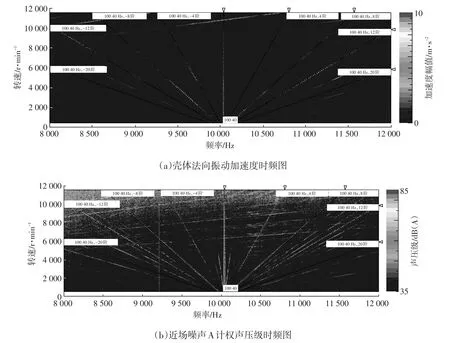
图7 电机采用五段式SVPWM的振动、噪声时频图
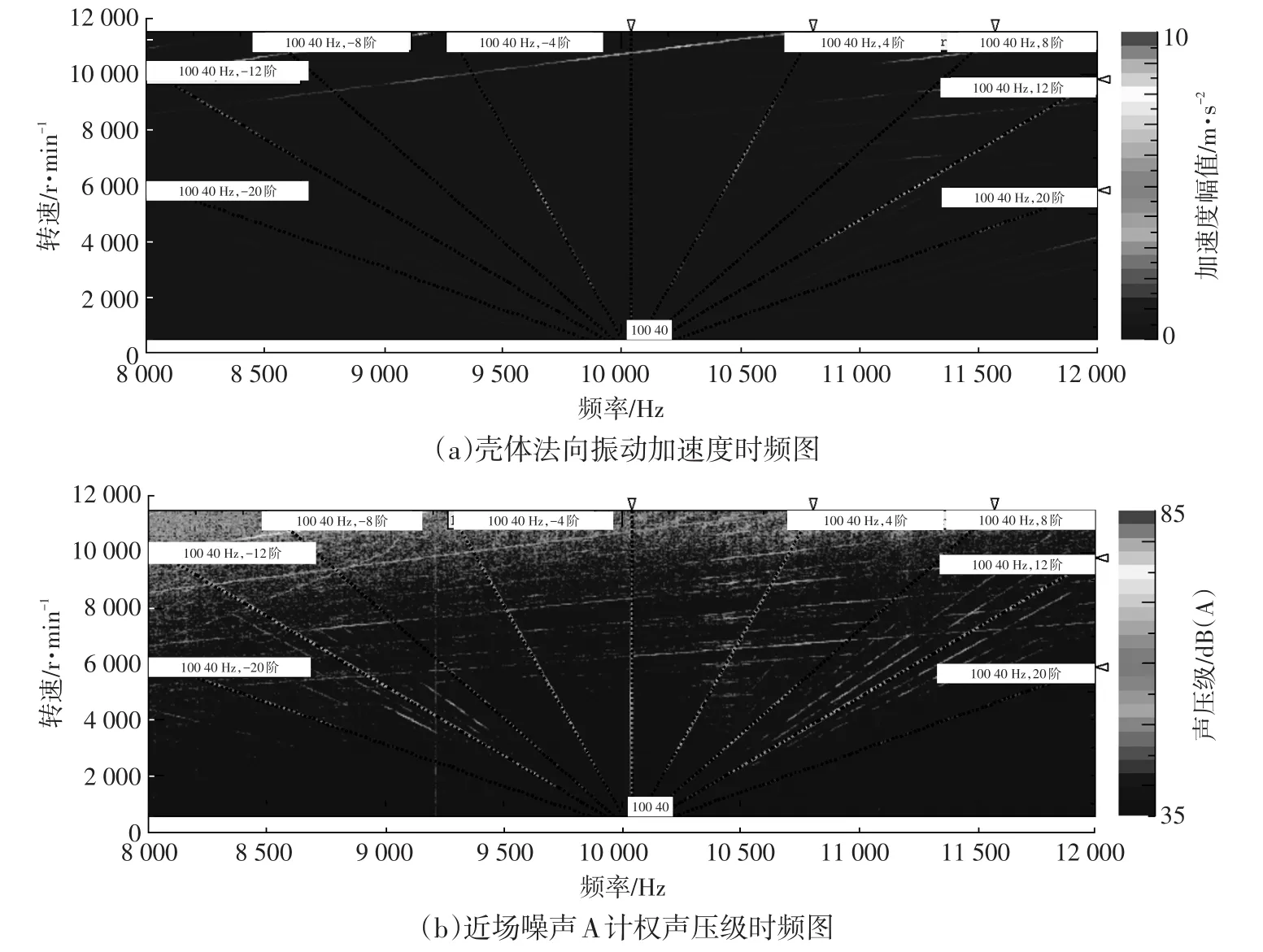
图8 电机采用七段式SVPWM的振动、噪声时频图

图9 电机壳体法向振动加速度对比
因此,电机采用七段式SVPWM控制时,4阶振动增大1.37 m/s2,0阶、8阶、-8阶振动加速度分别减小8.17 m/s2、1.31 m/s2、7.95 m/s2。
电机分别采用五段式与七段式SVPWM控制的4阶、0阶、8阶、-8阶近场噪声对比如图10所示。由图10可知,在转速530~9 000 r/min范围内:采用五段式SVPWM控制时,电机近场0阶、8阶、-8阶噪声声压级分别在2 599 r/min、3 351 r/min、3 224 r/min处达到峰值85.84 dB(A)、70.68 dB(A)、69.17 dB(A);采 用 七 段 式SVPWM控制时,电机近场0阶、8阶、-8阶噪声声压级分别在4 898 r/min、6 849 r/min、8 847 r/min处达到峰值64.63 dB(A)、61.47 dB(A)、56.52 dB(A);而电机近场 4 阶噪声声压级在2种情况下大体一致。
因此,电机采用七段式SVPWM控制时,电机近场0阶、8阶、-8阶噪声声压级分别降低21.21 dB(A)、9.21 dB(A)、12.65 dB(A),优化效果显著,而4阶噪声声压级无明显变化。


图10 电机近场噪声对比
上述振动噪声分析结果表明:与采用五段式SVPWM相比,电机采用七段式SVPWM控制可以显著降低以载波频率为中心频率的0阶、8阶、-8阶的振动噪声。
5 结束语
本文针对电动汽车驱动用永磁同步电机在载波频率附近的高频噪声突出的问题,分别对采用五段式与七段式SVPWM控制的永磁同步电机的径向电磁力进行仿真分析并对两种情况下的电机进行振动噪声测试,结果表明,与五段式SVPWM相比,电机采用七段式SVPWM控制时,以载波频率为中心频率,4阶振动增大,但4阶近场噪声基本不变,而0阶、8阶、-8阶的振动和近场噪声均显著减小,试验结果与仿真结果有较好的一致性,电机采用七段式SVPWM控制可以有效优化以载波频率为中心频率的0阶、8阶、-8阶高频阶次噪声。
猜你喜欢
电子测试(2021年23期)2022-01-22 09:23:56
防爆电机(2021年5期)2021-11-04 08:16:30
防爆电机(2020年6期)2020-12-14 07:16:54
汽车实用技术(2019年24期)2019-12-27 03:52:46
组合机床与自动化加工技术(2019年7期)2019-08-06 03:51:06
价值工程(2017年28期)2018-01-23 20:48:29
光学精密工程(2016年3期)2016-11-07 09:03:49
中国学术期刊文摘(2016年2期)2016-02-13 16:01:41
大电机技术(2015年5期)2015-02-27 08:22:28
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
