
三维防热振动连接边界及试验技术研究
2019-08-19 01:56韩文龙逯志国胡彦平
振动与冲击 2019年15期
韩文龙, 逯志国, 胡彦平, 卫 国, 张 群
(北京强度环境研究所 环境可靠性中心,北京 100076)
由于飞行器在空中处于自由飞行时,既要经受摩擦产生的热环境影响,又要经受气动噪声产生的振动环境的影响,特别是对于超高音速飞行器,由于速度极高,使得飞行器结构自身热环境和气动环境变得极其恶劣,如何在地面上模拟飞行器飞行时所经受的各类极端载荷条件[1-3],对工程设计具有重要的意义。同时随着航天技术的不断发展,工程设计更加注重和追求天地一致性[4-5],因此地面试验的研究越来越倾向于模拟产品、飞行器等在天上经受载荷的真实状态。为此设计结构件的地面多维热振试验对考核飞行器结构特性具有重要意义[6-9],但以往热振试验均以固支状态下单轴热振,或依次展开多台并激振动试验、热试验[10],对模拟飞行器空中自由飞状态具有局限性。同时以往热振试验由于传感器耐热性能差,通常在远端利用常温传感器进行振动控制,控制精度无法很好的保证。且以往受加速度测量设备及测量技术的限制,很难准确获取结构件内部在高温状态下加速度响应数据[11-12],使试验存在缺憾。本文设计并搭建了三维热振试验系统,攻克了各类技术难关开展了相关试验,并依据试验分析结果建立并修正了三维连接结构的有限元模型,结合试验及仿真结果对多维振动的边界连接形式进行了研究,率先对高温状态多维控制技术及方法进行探索,并结合研究成果率先在国内开展了多维热振试验的有效工程应用[13]。
1 理论基础
多维运动模拟试验用多个振动台实现,振动台的个数应与所要控制的响应点数匹配[9]。控制谱矩阵的维数等于界面自由度数,其对角项为该自由度的自谱密度,非对角项为自由度间的互谱密度。以三维试验为例,对每一个频率,矩阵包括9(3×3)个元素:
(1)
式中:Gxyz为空间谱密度矩阵。
自谱密度为实数,可按预示或遥测和包络的方法得到;互谱密度是个复数,却难以用例行的方法得到。如果互谱密度用极坐标记号表示就有
(2)
式中:Gyx(f)为互谱密度的幅值;θxy(f)为相位角;*为共轭。
γxy(f)为相干函数,表示如下:
(3)
通常用以上相干函数来来归一化互谱密度的幅值,应为它适用于包络程序,由此就有:
(4)
即互谱密度依赖于相干函数和相位角的规定。相干函数恐怕只能通过外场测量得到,如果采用包络程序,那么在每个频率上的相干值必须满足一定关系。多维随机振动试验的模拟很依赖于各自由度之间相干函数的定义。而各自由度之间相干函数的取值又与使用环境中振源紧密关联,对于一个线性系统,频响函数与方向无关,故响应方向决定于激励方向。即使是受单振源激励的多自由度系统,其单元振动的主振方向与振源方向也始终一致。这就意味着,对于噪声激励,可能要取较小的相干系数值;对于发动机振动激励,可能要取较大的相干系数值。本文三维防热振动试验系统主要模拟自由飞状态下产品由于气动噪声引起的振动,因此多维振动控制过程中相干系数应取[0,1]之间的较小数值。
2 三维防热振动试验系统的设计
由于导弹及飞行器在空中均为自由飞状态,为最大限度的模拟导弹及飞行器在天上的飞行状态,试验整体设计采用“柔性自由悬吊+尾端三向铰接激振”方式进行。三维防热振动试验系统主要有激振系统、三维振动连接系统、内循环水冷装置、弹性悬吊平衡系统等组成,具体见图1~图2所示。
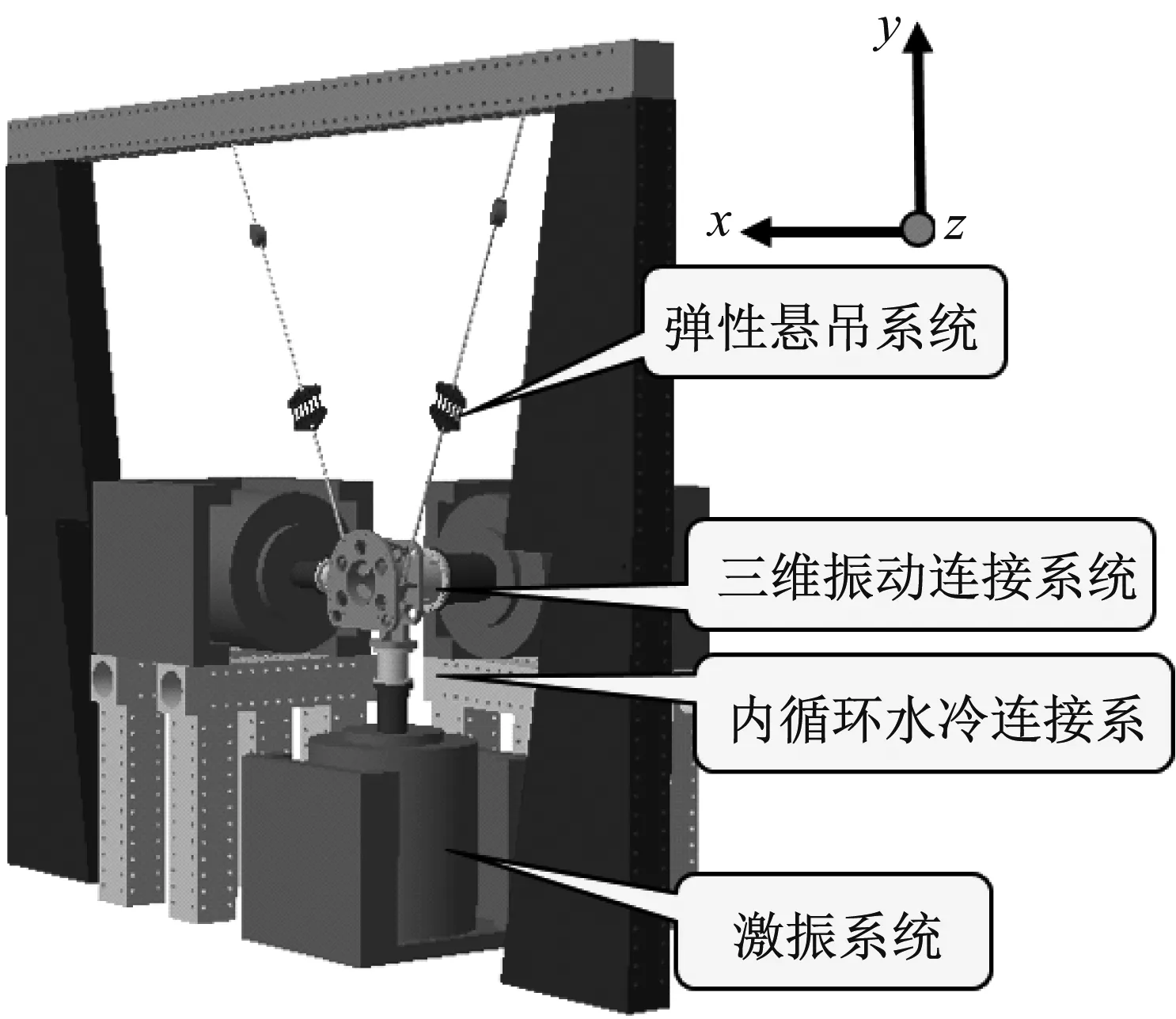
图1 试验系统示意图
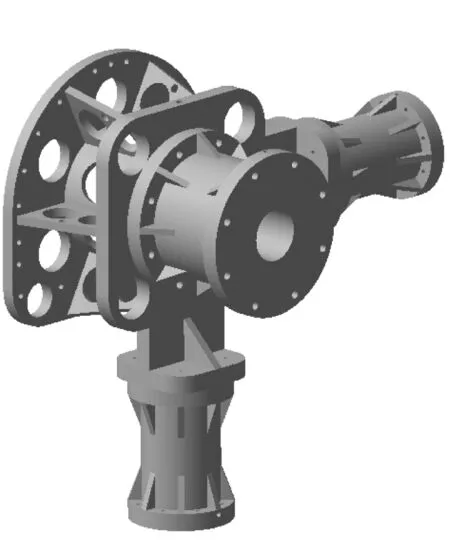
Fig.2 Schematic diagram of Multi-dimensional vibration connection system
3 三维防热振动连接边界确定
由于三维防热振动试验连接系统采用“柔性自由悬吊+尾端三向铰接激振”方式进行,此类试验系统主要模拟飞行器自由飞状态时气动噪声对结构产生的影响,为最大限度模拟飞行器自由飞行状态,地面试验采用三维热振模式,三维激振系统的三个正交轴向均采用双向液压解耦球头,因此三维激振系统激励边界为三轴向铰接连接边界,边界连接形式不易直观确定。为更准确的确定三维激励系统中各轴向边界连接形式,本文通过试验结合仿真的手段对有限元模型的连接边界进行多次设置和调试,最终确定了边界连接形式。
3.1 试验系统的搭建及测试
根据设计方案搭建三轴铰接振动激励系统,并对系统进行测试,测量此连接边界下整体工装的结构响应特性,试验系统搭建,见图3所示。
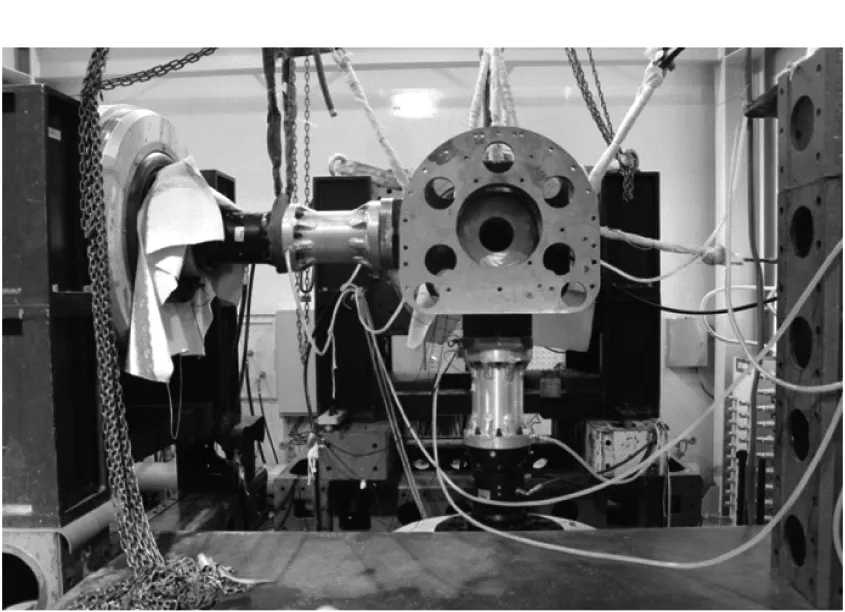
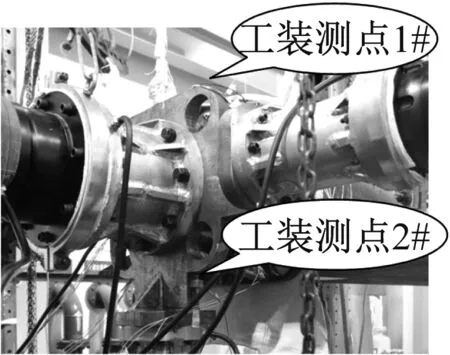
图3 系统调试状态
采用该试验系统,以随机小量级三轴同时激励的方式,控制方式采用MIMO(Multiple-Input Multiple-Output)形式下的3×3矩阵,即控制点数量与激励源一致,且一一对应。三个控制点分别位于三个振动台的台面上,测量整体连接工装上响应特性曲线,其结果见图4所示。
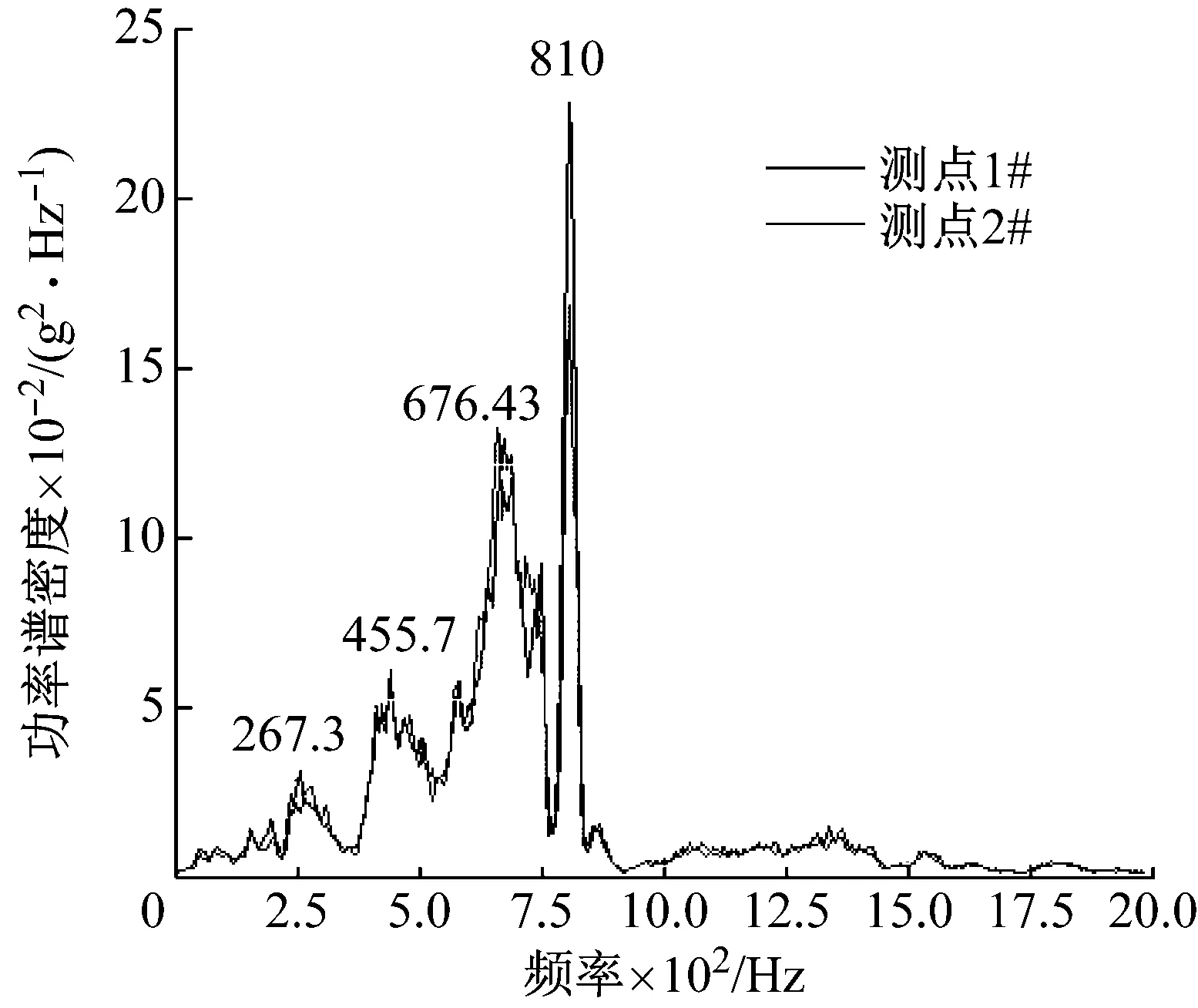
图4 工装测点响应曲线
3.2 有限元模型的建立及仿真
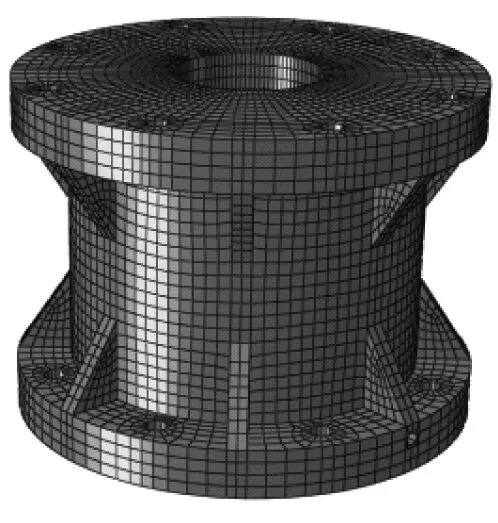
依据三维振动连接系统几何模型及试验状态建立其结构有限元模型,并依据试验结果对有限元模型及连接边界进行修正,有限元模型采用6面体实体单元,为保证有限元模型网格均为6面体单元,对模型进行切割划分,网格模型见图5所示。材料参数属性如表1所示。根据实验结果和各轴向液压球头工作原理对各轴向连接边界进行多次设置和调试比较,最终设置如表2所示的边界形式。
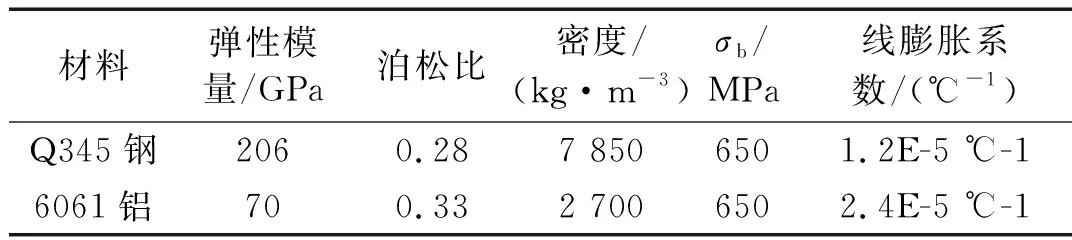
表1 材料属性
依照以上网格划分、材料属性设置、连接边界类型,对三维防热振动连接系统进行模态分析,其前三阶模态振型,见图6~图8所示。

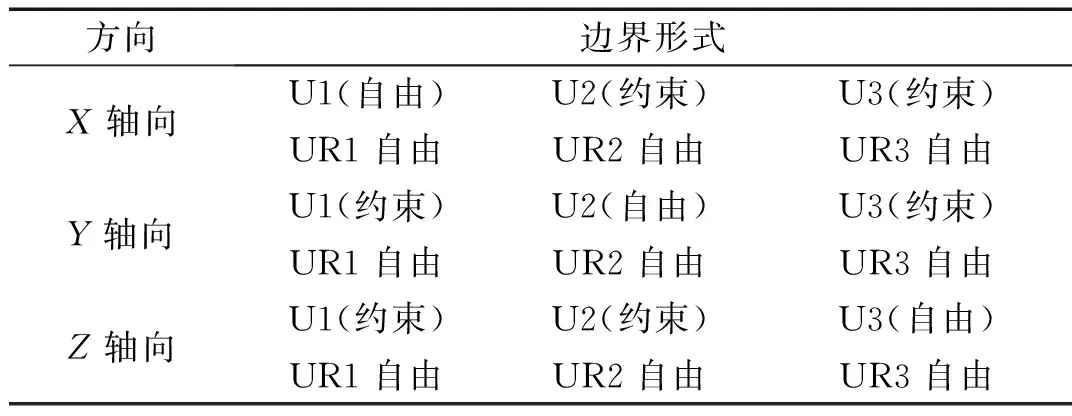
方向边界形式X轴向U1(自由)U2(约束)U3(约束)UR1自由UR2自由UR3自由Y轴向U1(约束)U2(自由)U3(约束)UR1自由UR2自由UR3自由Z轴向U1(约束)U2(约束)U3(自由)UR1自由UR2自由UR3自由
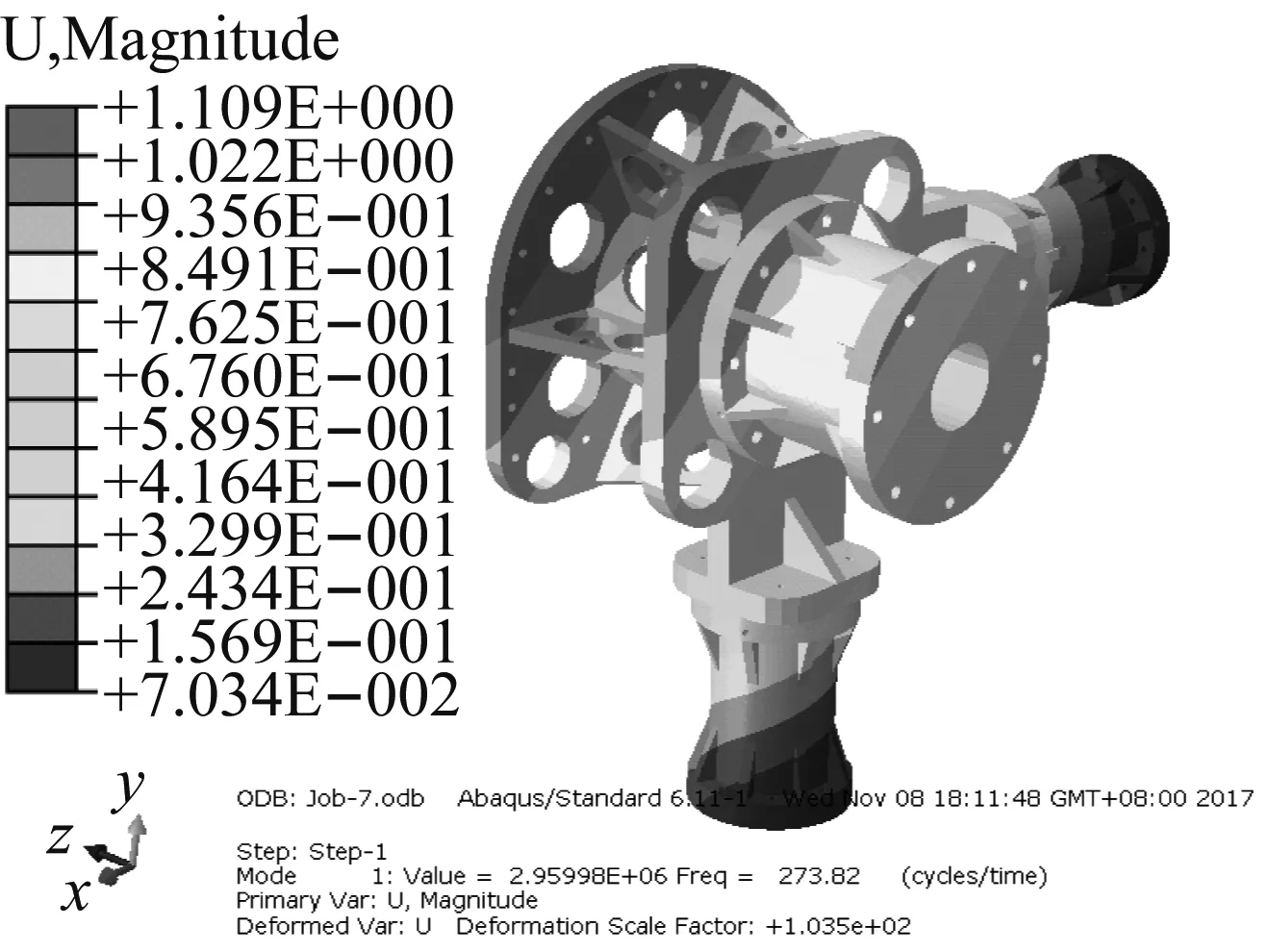
图6 第一阶模态
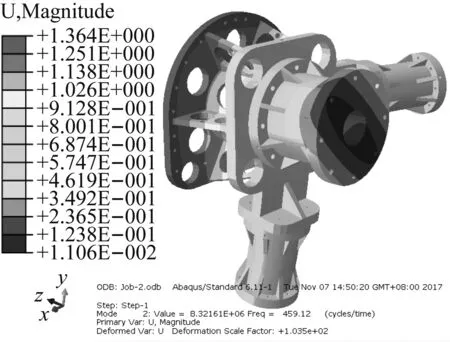
图7 第二阶模态
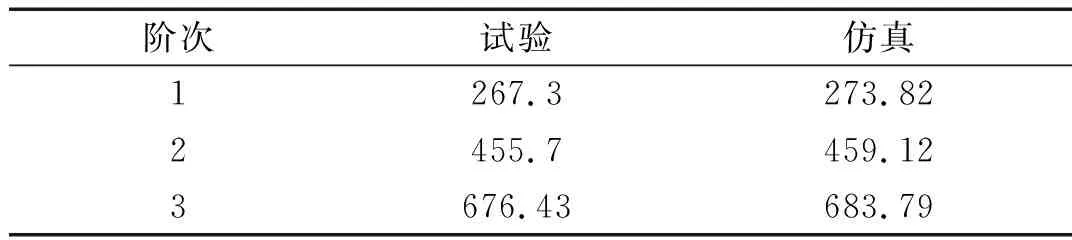
3.3 试验与仿真结果对比分析
试验结果与仿真结果对比见表3所示。
对比试验与仿真结果可知三轴铰接振动边界连接形式符合表2边界设定形式,由表2边界设定形式可知,三轴向18个自由度中有12个为自由边界,仅有6个为约束边界,且三个正交轴向的主振方向边界形式均为自由状态,所有转动也均为自由状态,由此说明此种连接方式能够最大限度的模拟产品在天上的自由飞行状态,符合试验系统设计预期。

图8 第三阶模态
Hz
4 高温状态下多维振动控制方法
高温状态下的多维振动试验在国内还处于研究阶段,尚未真正开展,其难点一方面在于防热,另一方面是高温状态下多维控制与测量技术。现已有的热环境下振动控制方法主要为以下三种。
(1) 在远端非高温区利用常温传感器进行直接控制,这种方法控制过程稳定,但由于距离试件连接位置较远,控制过程中能量传递很难均衡,很容易在试验条件的全频带内造成欠试验频带和过试验频带。
(2) 响应反馈控制方法,这种方法实际上属于开环控制,控制精度很难保证,且随着温度的升高,试验件的弹性模量及模态特性都会发生变化,常温条件下加速度传感器获得的振动谱线的对应关系在高温条件下未必成立,这可能导致试验件在热振联合环境试验过程中产生过试验或者欠试验,甚至被损坏。
(3) 非接触式控制方法,此方法单轴热振试验中尚可,多轴热振试验中,由于有相位和相干函数的影响,测量值速度很难精确的转化为功率谱密度矩阵,且在多维振动过程中非接触控制方法的可靠性将进一步降低。
基于以上原因本文提出利用接触式高温加速度传感器在与试件直接相连的工装高温区进行高温状态下多维控制,同时可以利用接触式高温传感器进行试件内部连接部位的高温加速度测量,因此如何选取合适的高温加速度传感器,如何布置控制点的位置对本文至关重要。
4.1 高温加速度传感器的选取和验证
通过调研比较及试验验证,选择某型高温加速度传感器,该型传感器具备体积小、耐温性能良好(耐温530 ℃)特点,连接电缆也为高温电缆且与传感器分体连接,安装方便,传感器及其灵敏度变化趋势,见图9所示。
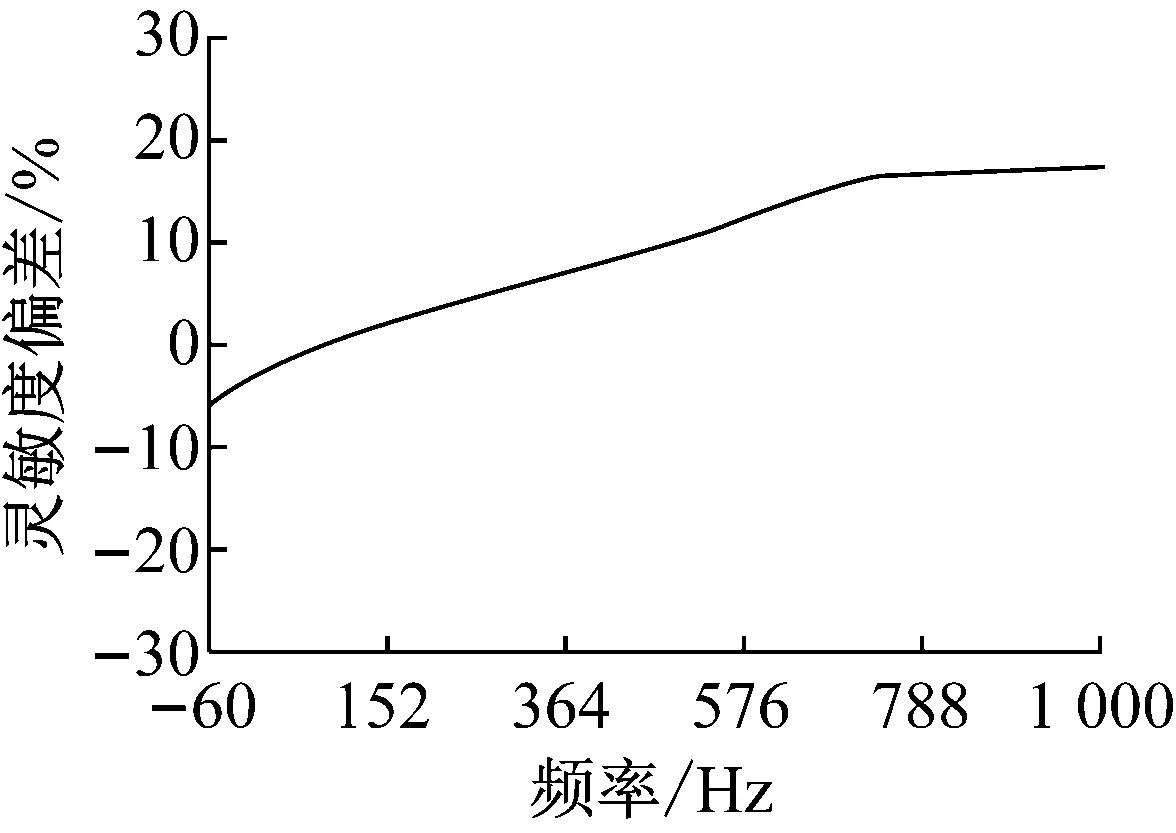
图9 传感器外形及灵敏度变化趋势
采用石英灯加热和声激励的方法验证传感器在高温环境下的性能,试验验证了从常温到500 ℃各温度区间的加速度响应情况,并在500 ℃时连续加热40 min考核其长久耐高温性能,考核结果,见图10~图11所示。
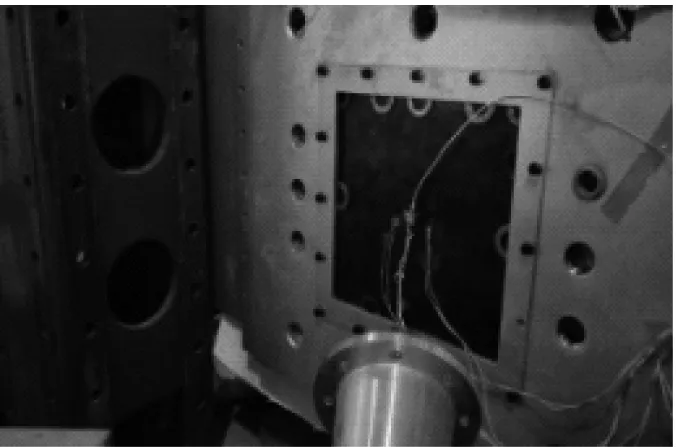
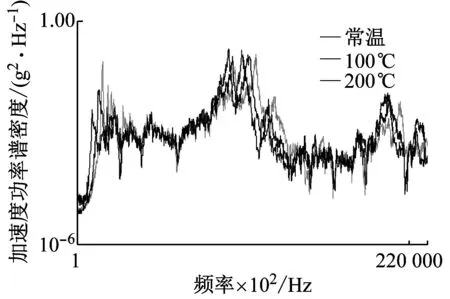

图11 高温加速度传感器验证曲线
试验过程中从常温开始以100 ℃步进逐级加载至500 ℃,加温过程中噪声激励始终进行,在每个温度段待温度稳定后测量其加速度响应,在500 ℃时持续加温40 min充分考核传感器的耐高温性能,从曲线形式上看测量结果复合结构特性,曲线趋势吻合较好,温度载荷不断增加的情况下,加速度测量曲线稳定,无任何跳变,因此在热振试验中舱内加速点测点选取此类加速度传感器能够满足试验要求。
5.2 控制点位置的选取及传递特性分析
分别在远端常温区靠近水冷工装附近及与试件直接相连的主工装后端面高温区位置布置控制传感器,各传感器的控制方向依次与各轴向的激励正方向保持一致。在紧靠连接工装的产品端布置三向加速度测点,具体位置见图12所示。测点各方向响应与各轴向不同位置控制点的传递曲线,见图13~图15所示。
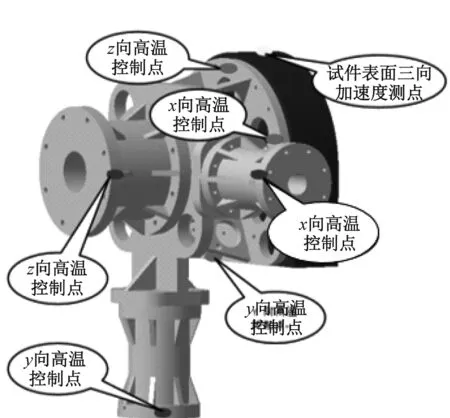
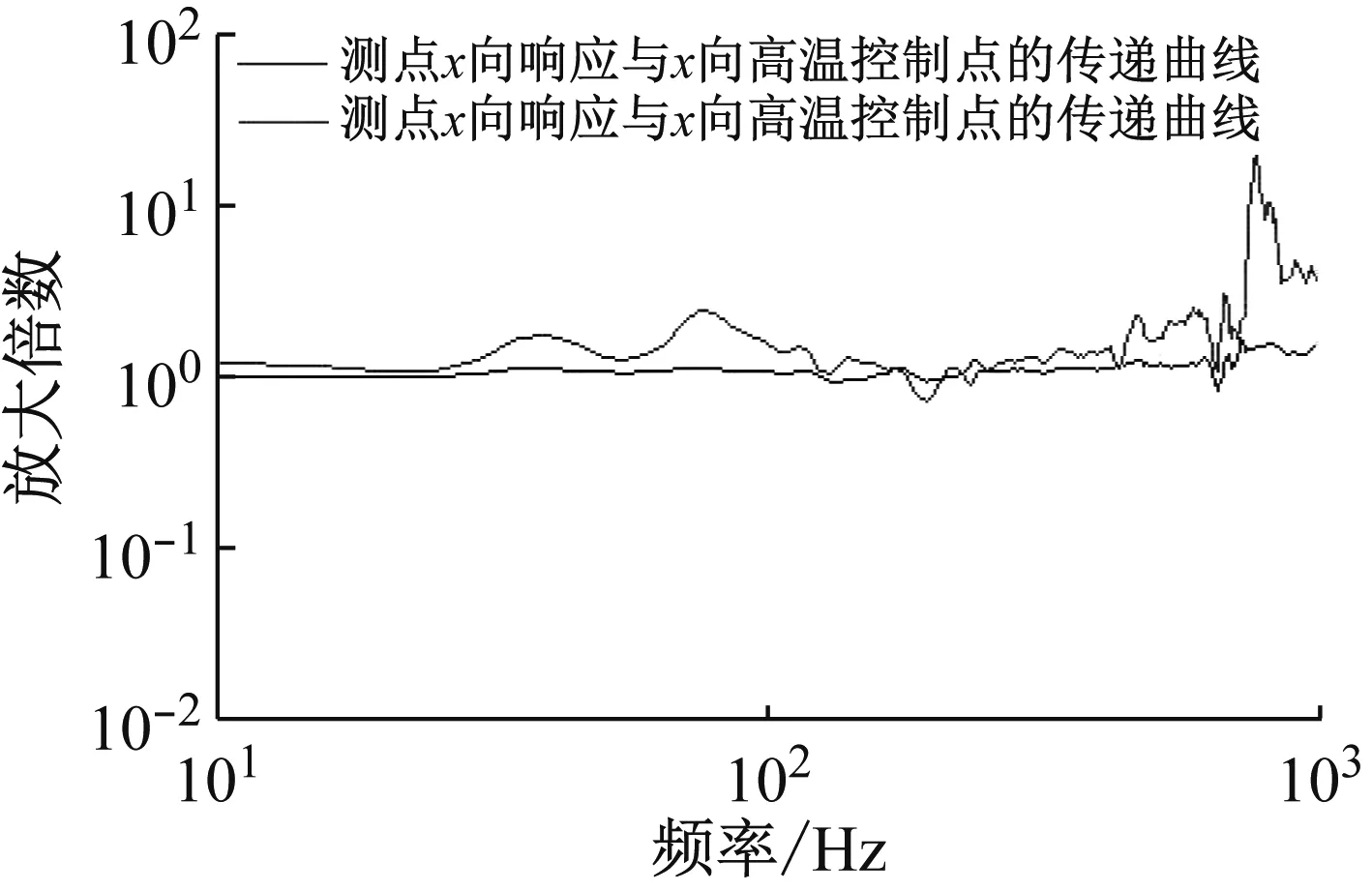
图13 X轴向测点与控制点传递曲线
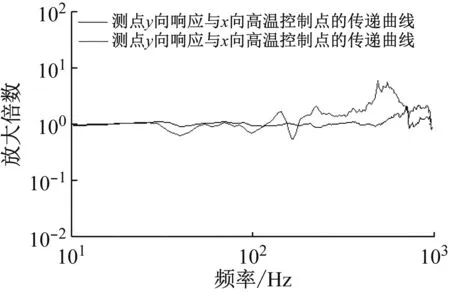
图14 Y轴向测点与控制点传递曲线
从图13~图15X,Y,Z三方向的传递曲线可知,1 000 Hz以下高温区工装控制点位置至产品测点位置几乎为1∶1传递,不存在传递明显衰减或放大频带;而远端常温区控制点位置至产品测点位置传递形式复杂,即存在衰减频带又存在放大频带;因此远端常温区控制很难满足试验条件的精确输入,使试验质量大打折扣,因而采用高温传感器在高温区进行多维振动控制能够精确控制振动载荷的输入,使得试验的质量及精度大大提高。
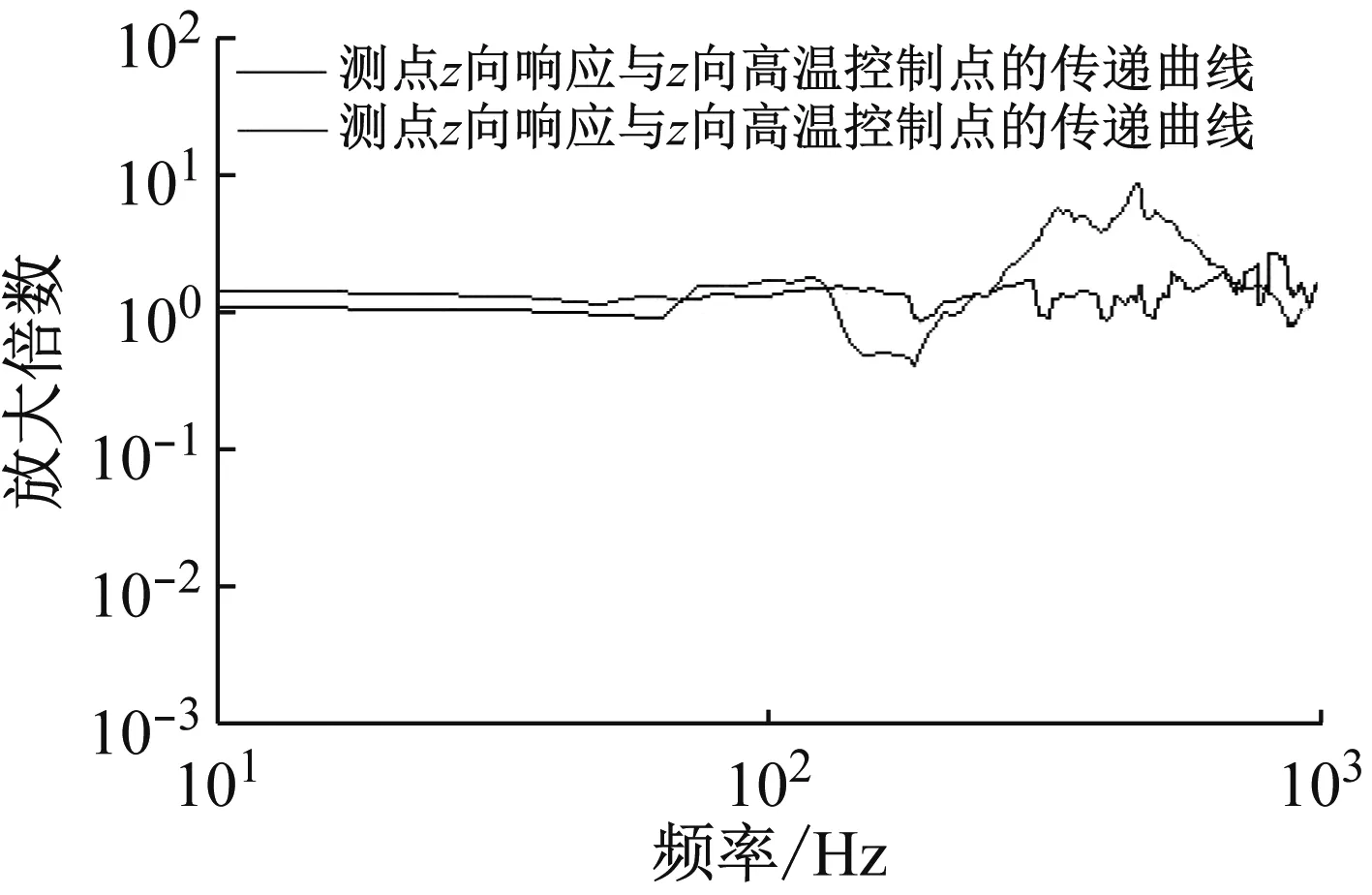
图15 Z轴向测点与控制点传递曲线
采用以上三维防热振动试验系统及高温区多维振动试验控制技术,在国内首次对某整舱试件进行多维热振试验,振动量级总均方根值为5.16 g,加热时间为3 000 s,舱体迎风面热流最高温度达1 300 ℃,图12所示三个高温控制点位置温度范围始终保持在280~330 ℃。由图16~图18可知,多维振动控制曲线满足容差要求,振动控制效果良好,由此说明以上三维防热振动试验方法行之有效、安全可靠。
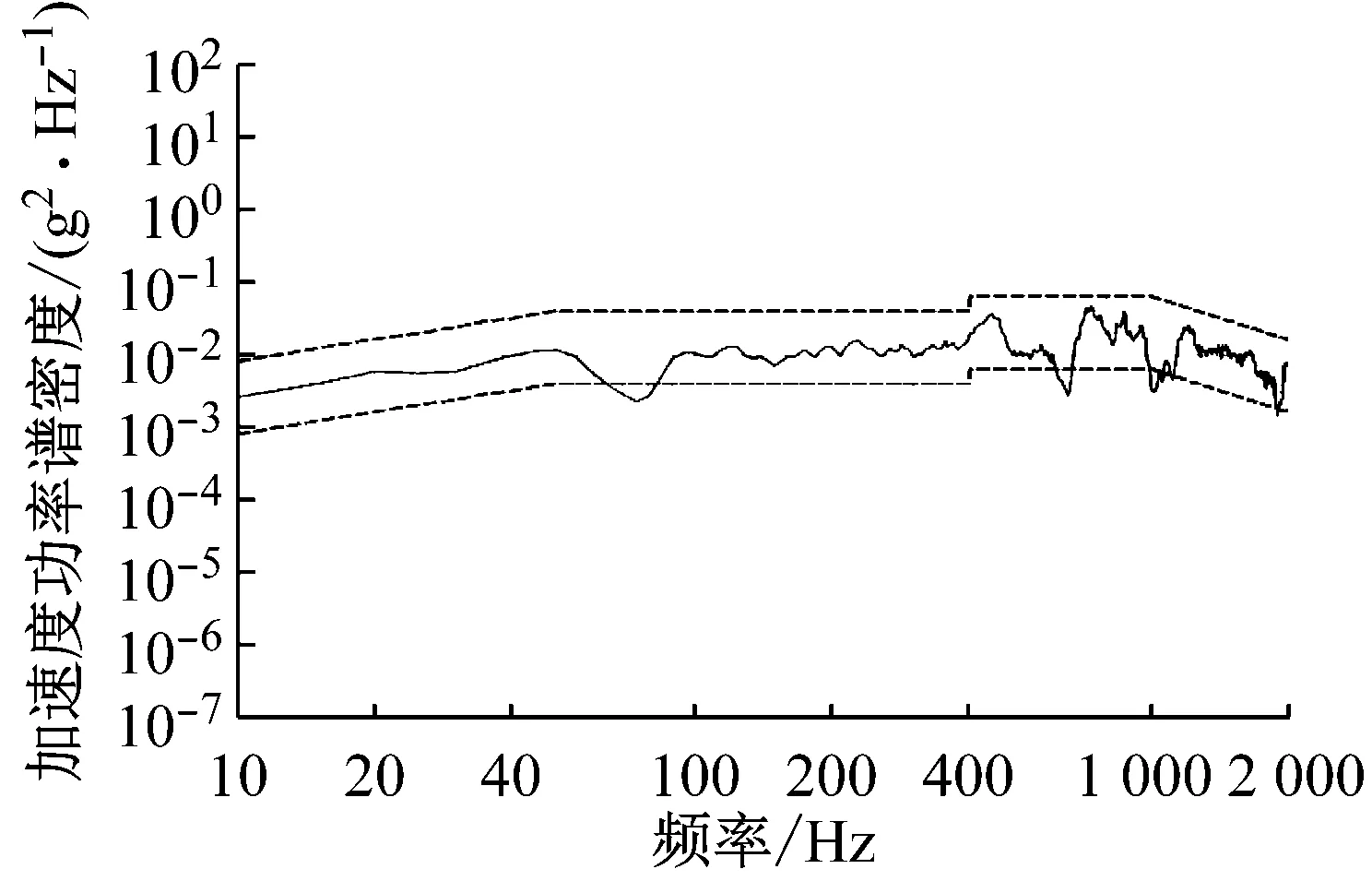
图16 Y向控制曲线
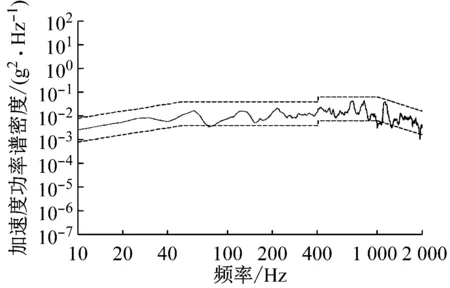
图17 Z向控制曲线
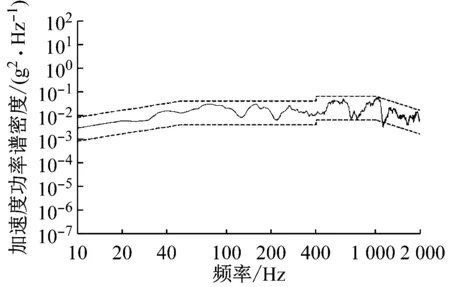
图18 X向控制曲线
5 结 论
(1) 设计并搭建了三维防热振动试验系统,此系统满足了多维振动对连接结构刚度、传力的要求,解决了对振动试验设备长时间有效隔热的技术难题;在国内首次实现了三维热振试验的有效工程应用。
(2) 依据三维振动连接系统几何模型及试验状态建立其结构有限元模型,并根据试验结果对有限元模型的连接边界进行多次设置和调试,最终通过对试验及模态仿真结果分析,确定了三轴铰接振动边界具体连接形式,证明三轴铰接振动边界形式能够最大限度的模拟产品在天上的自由飞行状态。
(3) 调研并验证了接触式高温加速度传感器,通过对比测点与高温区及常温区各轴向控制点的传递曲线,发现1 000 Hz以下试件测点与高温区控制点几乎为1∶1传递,不存在传递明显衰减或放大频带,而试件测点与远端常温区控制点传递形式复杂,即存在衰减频带又存在放大频带;在国内首次突破了采用高温加速度传感器在高温区进行多维振动试验控制的技术难题。
猜你喜欢
水泵技术(2021年5期)2021-12-31
汽车实用技术(2021年10期)2021-06-04
全球定位系统(2021年1期)2021-03-26
火箭推进(2020年6期)2021-01-05
中国环保产业(2019年10期)2019-11-21
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
全球定位系统(2015年4期)2015-02-28
北京航空航天大学学报(2014年11期)2014-12-02
