面向实时数据的CPS一体化建模方法 *
2019-08-13 05:06罗晨霞李晓娟施智平XiaoyuSONG
软件学报 2019年7期
罗晨霞, 王 瑞, 关 永, 李晓娟, 施智平 , Xiaoyu SONG
1(轻型工业机器人与安全验证北京市重点实验室(首都师范大学 信息工程学院),北京 100048)
2(电子系统可靠性与数理交叉学科国家国际科技合作示范型基地(首都师范大学),北京 100048)
3(Portland State University, Portland 97207, OR 97207, USA)
CPS是一个在环境感知的基础上整合了物理和计算元素的系统,可以智能地响应真实世界场景的动态变化.它通过计算进程和物理进程相互影响的反馈循环实现深度融合和实时交互增加或扩展新的功能,以安全、可靠、高效和实时的方式监测或是控制一个物理实体[1].从2006年2月《美国竞争力计划》将CPS列为重要的研究项目后,信息物理系统取得了很好的研究和发展[2].直至现在,CPS已经涵盖了小到智能家庭网络,大到工业控制系统和智能交通系统,渗透到了航空、汽车、能源、医疗卫生和物流等多个领域.随着CPS的广泛应用,它的安全性问题也越来越得到关注.其中,由于CPS在真实的物理环境中工作,各种环境因素对于CPS的影响是实际存在且不容忽视的,它们可能会导致CPS从传感器中获得的数据与实际环境不符,从而使得CPS做出错误的或是危险的行为[3-5].因此,在对CPS的安全性和可靠性研究中考虑物理环境的影响是非常有必要的.
保证系统安全性和可靠性的传统手段有静态分析、测试和模型检测等.静态分析是一种离线分析程序的技术,旨在根据程序结构来确定程序的属性.通常这样的静态分析只能检测一组有限的通用错误,如数组绑定操作潜在的死锁问题,而且常常会产生误报[6].测试是对选定的输入数据集运行系统,通过比较所产出的输出与预期值来判断系统是否会有错误,但依然存在测试用例不完备的问题,通常不能保证系统绝对没有错误[7].与测试不同,模型检测是针对某类性质来检查系统是否合乎规约,它的基本思想是将一个过程或系统抽象成一个有穷状态模型,然后加以分析验证.由于对系统空间的穷举搜索,在并发系统中,其状态的数据往往随着并发分量的增加呈指数增长,因此,模型检测会存在空间爆炸问题.与以上这些传统质量保障技术相比,运行时验证方法是一种轻量级的形式化方法,并且具有高度的可扩展性[8-13],它对运行的软件系统进行实时监控,可以实时地验证系统的执行路径是否满足属性规范.由于运行时验证方法是针对程序或者程序产生的踪迹进行分析的,并且系统在运行时的执行路径是有穷的,因此不存在空间爆炸问题.形式化验证方法作为传统质量保障方法的补充,已被应用到了多个领域,如:无线传感器应用[14]、车辆总线系统[15]、C程序[16]和医疗系统[17]等.同样地,在 CPS领域也取得了一定的成果.例如,针对CPS中计算和物理系统由于复杂交互出现的问题,利用形式化验证方法检测和验证了可能导致复杂交互失败的条件.提出了改进的形式化方法来验证CPS中组件的复杂性问题,提高了CPS的可靠性[18].也有学者研究自动转换方法和规范逻辑语义以降低验证复杂性和运行开销[19].对于特殊情况,如关于 CPS是分布式系统并且在动态物理环境下存在离散控制问题,有关学者提出了针对性的形式化验证方法和框架[20].
关于考虑物理环境对 CPS的影响,国内外已有相关研究.为了使自主机器人在远程感知的开发研究中应对环境的变化并允许探索全新的领域,Tabak等人介绍了一种算法,通过在环境中不同位置收集数据来生成或更新环境的3-D体积模型[21].为了解决CPS中由于多维异构性导致的环境信息描述不统一的问题和环境信息融合交互困难的问题,于洋等人基于元建模设施和建模技术,提出一种面向CPS环境信息的建模方法.该方法利用层次化的建模思想和领域化的建模方法,定义了环境信息的元元模型及不同领域中环境信息的元模型,实现了环境信息的元信息统一和不同领域中展现形式的多样性[22].在医疗领域,允许工程师明确而精确地指定有关CPS设计的物理环境假设,并通过算法将物理模型与系统模型相结合,利用 UPPAL进行医疗器械的形式化验证[23].
本文针对物理环境的影响提出一种面向实时数据的一体化建模方法,通过定义一系列规则,将环境模型集成到运行时监视模型中.该方法的原理是通过动态调整监视模型中的参数范围,使得 CPS中的安全属性在复杂的物理环境中仍然得到满足.具体步骤是,首先建立环境的数学模型.然后,依据合并规则将数学模型进行整合,整合的最终结果是,相同的系统参数有且仅有一个相同的环境模型.接着,定义了转换规则,用伪代码作为中间转换语言描述环境模型.最后,根据组合规则将环境模型代码组合到运行时监视模型中进行验证.最后,本文搭建了 EV3实验平台,以移动机器人避障为例,对电量续航进行安全性提示,通过分析和建立环境模型,然后将此模型组合到监视模型中,以使监视模型更加完整,在不同物理环境中对续航时间的提示更加准确.
本文第1节介绍运行时验证方法的执行过程和JavaMOP基础知识,为本文提到的运行时监视模型和环境建模方法的研究提供理论基础.第2节详细介绍环境建模方法,定义了合并、转换和组合规则,并举例说明.第3节对第 2节中提出的方法进行实验评估,将影响电池容量的环境模型整合到监视模型中进行实验评估.第 4节总结本文工作.
1 预备知识
本节首先介绍了运行时验证方法、原理和本文用到的运行时验证工具框架,为本文后续的环境建模方法提供理论基础.
1.1 运行时验证
运行时验证是一种在线的、实时的形式化验证方法,它允许测试者使用数学的形式来指定系统并监测这些属性规约在系统运行时是否是一直满足的,当系统行为违反属性规约时,激发处理程序给出提醒或是执行用户自定义程序引导系统到正确的行为.它避免了模型检测方法的空间爆炸问题和传统测试的测试用例不完备问题,是一种实时的、全自动的、技术规模更小的质量保障方法.
运行时验证方法的原理是构造实时时序逻辑的时间自动机.如果系统的执行路径表示为v=ʋ1ʋ2…ʋi…,其中,ʋi是一个时间状态,那么,运行时验证方法则是将时间自动机扩展为监视器来验证该执行路径是否满足属性规约.如图 1所示,对一个系统进行运行时验证,首先,根据该系统的属性规约生成监视器.然后,将目标系统置于监控下,监控器下的事件记录器负责窃听目标程序的数据和执行状态,将目标程序的每一次类的加载、调用和函数的调用、执行等操作进行非侵入式的收集,这些操作将会随着系统的执行实时地、不断地在存储器中更新.状态检查器根据需要验证的属性规范匹配系统状态,确定是否违背或满足属性.最后,通过执行监控程序给出验证结果,当违背属性时,它会触发处理程序,向目标程序发送自定义的反馈信息,以便目标程序可以意识到不安全的操作及时修正或是向用户发出警示提醒.
运行时验证根据监控器监控对象的不同有两种应用.一种是实时监测正在执行的行为序列,验证当前行为是否满足属性规约,违背时给出提示,这种运行时验证称为在线验证.另一种则监测历史执行序列,离线分析存储执行路径,被应用在离线的自动评估测试中,它被称为离线验证[24].对于 CPS系统来说,要求尽早地监测违背安全属性的行为,从而可以积极地做出反应,所以本文考虑的是在线验证方式.
1.2 JavaMOP语义
面向监控的编程(monitor-oriented programming,简称MOP)是一个软件开发工具支持和分析框架,它支持面向方面编程的编织模式,支持多种形式化逻辑语言来描述属性规约,是一个自动化程序较高的运行时验证框架[11].MOP工具会自动地根据属性规约合成监视器,并将它们集成在应用程序中.
MOP框架具有以下特点.
(1) 将形式化规约和监视代码集成为一个系统,允许开发测试人员使用数学形式来指定系统,并证明这些属性.
(2) 它是一种轻量级的形式化方法,仅考虑一个模型的计算,而不是整个状态空间模型的检查.
(3) 具有逻辑语言的可扩展性(可以在程序中的任何地方添加逻辑语句,可以指定过去或未来的状态).其中,时序逻辑语言不仅限于纯布尔命题的序列,还可以是具有时间特性的序列,即可以约束随时间变化而变化的数据值的命题序列.
MOP框架可以实时地监测系统的执行,当发现系统行为违背或满足属性规约时控制程序的执行.这种控制使得用户可以为当前危险行为提供处理程序,这些处理程序不仅可以向用户报告错误或抛出异常,还可以执行更加复杂的动作,例如重置状态或重启系统.一个规范定义的运行时监视器可以自动地组合到目标系统中,以便在违背规约时及时地更正系统行为,保证系统的安全性和可靠性.MOP的实例包括 JavaMOP和 BusMOP,由于Java语言具有跨平台性以及实验平台EV3的第三方插件Lejos支持Java语言,所以本文应用JavaMOP实例.完整语义如图2所示[11].
JavaMOP支持的逻辑语言包括上下文无关语法(context free grammar,简称 CFG)、线性时序逻辑(linear temporal logic,简称LTL)、有限自动机(finite state machine,简称FSM)、过去时间的线性时序逻辑(past time linear temporal logic,简称ptLTL)等.它提供图形用户界面(graphical user interface,简称GUI)和命令行界面,用于编辑和处理规约.同时通过JavaMOP,用户可以定义自己的属性描述语言,具有可插拔性和灵活性.
JavaMOP主要包括5个部分:头部、变量声明、事件声明、属性的形式化描述和处理程序.
头部:头部包括修饰符、规范ID和参数列表3个部分.修饰符定义了监视模型中事件的访问方式和索引方式.规约ID是用户自定义名,即监控模型的名称,不可重复定义.
变量声明:变量声明和参数列表中的变量不同.参数列表中的变量是JavaMOP规范中的变量,通常情况下是监控模型中的系统变量.而变量声明是本地监视器变量,可以在事件和属性处理程序中修改.监视器变量的作用多种多样的,可以记录监视的状态,写日志等.其声明方式和使用方法遵循Java语法.
事件声明:其作用是定义事件.事件是指在目标程序执行过程中立即发生的一个动作,在监控程序中对应于被监控变量的设置与更新,或是被监控方法的调用与执行.JavaMOP的事件声明遵循AspectJ语义[25],包含处理逻辑"advice"定义〈AspectJ advice〉和事件操作〈Java Statements〉,其中,事件操作部分可以通过Java编程修改被控程序或是监视器状态.事件编织到 Java程序中后,将会记录事件执行的路径,用来检查是否符合属性规约.另外,事件的声明顺序是有意义的,如果多个事件同时发生,最终监视模型将按照事件的声明顺序执行.
属性定义:属性在JavaMOP中是可选的,即一个MOP规范中可能包含多条属性或没有属性.一条属性由一个属性描述逻辑名(〈LOGIC Name〉)和逻辑语义(〈LOGIC Syntax〉)构成,之间以冒号隔开.由于运行时验证方法监视的是系统的执行路径,因此,属性是一系列事件与逻辑的组合.MOP中规定属性中所涉及到的所有事件必须是已定义的.JavaMOP支持的属性描述语言包括FSM、ERE、CFG、ptLTL、LTL等.
处理器:处理器以@fail、@violation或@validation开头,分别代表自动机的不确定、违背或满足这3种状态.在〈Java Statements〉中用户可以自定义动作,在满足处理器触发条件时执行.
2 环境建模方法
为了解决 CPS中由于环境影响导致的系统数据与实际环境不匹配的问题,本文结合运行时验证技术,提出了一种在 CPS中应对环境变化的一体化建模方法.该方法定义了合并规则、转换规则和组合规则,将领域模型定义为数学模型,然后集成到监控模型中.最终实现将环境信息分享到监控模型中的目标,使得监控程序的执行更加精确,安全属性在不确定的环境中始终得以满足.
2.1 系统框架
一体化建模方法不改变运行时验证方法的原理和执行过程,该方法主要是在图 1所示运行时验证过程的基础上,增加环境建模方法,对监视模型中的属性和参数产生影响,即对监视模型生成的前期数据产生影响.系统框架如图3所示.
在CPS中,属性是由用户提出的需求或是需求文档中的内容形式化后的规约,包括CPS的功能性需求、非功能性需求和设计约束这3个主要部分.目标程序一般是指CPS控制器中的计算或控制程序,将监视器插装在控制器中,通过实时地监测控制程序来验证CPS的执行路径是否满足或违背安全属性规约.对CPS进行一体化建模,将环境影响集成到监控模型中的过程如图3所示.首先,由于数学具有抽象、精准的特点,将领域模型描述为数学模型.然后,根据合并规则标准化环境模型,主要是对作用于相同系统参数的不同环境模型进行整合,即将影响同一个系统参数的所有环境影响关系都集合在一起进行数学的划分,使最终的环境模型之间不产生交集,这样做可以避免发生验证逻辑错误.因为运行时验证工具众多,使用的语言多种多样,所以必须要有一个统一的表达方式,使得不同语言的使用者可以清晰的阅读“中间模型”.而伪代码结构清晰、代码简单、可读性好,可以使得使用者很容易地以任何一种编程语言(Pascal、C、Java等)无歧义地实现算法,所以最后,定义转换规则,将标准化模型转换为伪代码.最后,通过监视模型对应的编程语言,将环境模型的伪代码遵循模型组合规则集成到运行时监视模型中.
在一个监视模型中,事件在监视程序执行过程中通过捕获被监控的操作来获取参数,其中,部分参数会参与到事件操作的计算中,这类参数被称为系统参数.系统参数的值可能会受到环境的影响而发生变化,在监视模型不知晓这种变化关系而执行运行时监视时,会出现无法正确识别 CPS不符合实际环境的危险行为,从而不会发出安全提醒的情况.该建模方法在标准化环境模型后,将转化的伪代码通过特定的语言写入事件操作中,将环境影响映射到系统参数的值域选择,从而使得参数可以随着环境的变化而发生改变,达到环境自适应的目的.这一过程不影响运行时验证过程,只对监视模型中事件的操作部分进行执行前的修改.
2.2 环境建模的规则描述
2.2.1 物理环境的数学模型定义
物理环境对 CPS行为产生影响的原因是系统中的某些参数会因为物理因素的改变而发生变化,具体体现为系统的动态输入发生偏差,从而影响控制系统的逻辑判断,故而波及到 CPS的行为.要避免这种影响,首先需要确定系统参数和物理环境的关系.这里先定义相关的符号表示,系统参数的集合S={s1,…,si,…,sn},环境参数的集合E={e1,…,ej,…,em},其中,集合中的每一个元素都用一个二元组(name,type)表示.下面是对物理环境的相关定义.
定义 1(环境数学模型).用一个三元组M(s,E′,R)来描述环境数学模型.其中,s∈S,是一个系统参数.E′∈E,是一组会对s产生影响的环境因素的集合.R是s和E′之间的一组数学关系的集合{r1,...,rk,...,rl}.
定义 2(关系模型).关系模型r∈R由一个三元组(F,VC,L)定义.其中,F是函数的声明部分,包括函数名、函数的参数和返回值类型.F指明了系统参数s在整个系统代码中出现的位置.VC是一个二元组(value(s),C(E′)),其中,C(E′)是物理条件,所以VC表示在条件C(E′)下的系统参数s的值为value(s).L是在此条件下该环境参数对系统参数的影响级别,影响级别是一系列的整数,从1开始,数值越大代表影响程度越小.此影响级别由领域模型定义.
例1:假设CPS的电池初始容量为1Ah,也就是说,电池每小时提供1A.温度对电池容量存在影响[22].
S1:当温度t在[15°C,35°C]时,电池容量不变.
S2:当温度t在[-10°C,15°C)时,C=1-2×(25-T)÷100.
以上述两种场景为例建立数学模型.这个例子涉及到了两个物理变量,温度T=(t,real)和Battery=(C,real).上述两种场景列出了这两个环境变量的两种关系,假设建立的环境数学模型为M0,关系模型为R0,则此例所对应的数学模型为M0(Battery,T,R0).为了便于撰写,这里为复杂的式子定义了别名.
c1:15≤t≤35,
c2:-10≤t<15,
v2:C=1-2×(25-T)÷100.
假设温度对电池的影响级别为1,系统变量C存在于函数handle中,根据S1和S2这两种情况,关系模型R0建立为{r01,r02},具体如下.
r01:(handle,(1,c1),1),
r02:(handle,(v2,c2),1).
另外,电池电容还受到环境湿度H的影响[22],具体关系如下.
S3:当环境湿度H在[10%RH,30%RH]时,电池容量下降10%.例如,若原电池容量C=1,则当电池处在该环境湿度后,C=0.9.
S4:当温度t在[40%RH,60%RH]时,电池容量不变.
同理,定义别名:
c3:0.1≤h≤0.3,
c4:0.4≤h≤0.6.
假设该环境关系建立数学模型为M1,关系模型为R1,影响级别为 2,则此例所对应的数学模型为M1(Battery,H,R1).关系模型R1为{r11,r12}.
r11:(handle,(0.9,c3),2),
r12:(handle,(1,c4),2).
在一个完整的数学模型中,VC应具有完备性,也就是说,不论环境处于怎样的状态,都能在VC集合中找到一个二元组(value(s),C(E′))与之匹配,同时,C(E′)之间互斥不相交.这样,在运行时验证时,在特定场景下的筛选结果是唯一的,因此程序执行路径是唯一确定的、无歧义的.
2.2.2 环境模型的合并规则
一个系统参数可能会受到多个物理因素的影响,同样地,一个物理因素也可能会影响到多个系统参数.它们之间的关系是复杂的,在领域知识中,这些数学关系表达是简单的,但在运行时验证中也是很难操作的,因为无法有效地避免同一个系统参数的不同影响因素之间的关系是完备且互斥的.因此,需要通过制定规则来规范化和标准化这些独立的数学模型,将多个相同系统参数单个物理影响因素的数学模型合并为一个系统参数多个物理影响因素的数学模型.此规则为后续将数学模型转换为伪代码提供逻辑基础.
假设有两个环境模型M2(s2,E2′,R2)和M3(s3,E3′,R3),如果s2=s3,则这两个对同一个系统参数建立的数学模型可以进行合并,合并结果为M(s,E′,R),其中,s=s2(s3),具体的合并规则定义如下.
前提条件:系统参数相同是判断两个模型是否可以合并的前提条件.
模型计算规则:集合M{m1,m2,…,mm}和N{n1,n2,…,nn}做组合操作会得到f(m,n)个结果,其中,每两个元素取“&&”,得到的结果之间取“||”,即{m1&&n1||m1&&n2||…||mm&&nn}.
模型合并规则(1).模型合并规则(1)也叫作模型内标准化规则,是一种针对关系模型的合并规则.具体为关系模型集合内的元素之间作“||”操作.其中,VC执行“||”操作,F和L不变.如M2中的关系模型R2={r21,r22,…,r2n},执行此规则变为新的R2={r21||r22||…||r2n}={F2,(VC21||VC22||…||VC2n),L2},M3同理.
模型合并规则(2).如果E2′=E3′,F2!=F3,即系统参数s在系统代码中的函数位置不同,那么,环境模型则相互独立,无需合并.为了规范化书写,M可以写成(s,{E2′,E3′},R2∪R3),也可以保持不变.例如:在M2模型中,R2=(F2,VC2,L2),在M3模型中,R3=(F3,VC3,L3),F2!=F3,规范化书写后M的R={R2∪R3}={(F2,VC2,L2)∪(F3,VC3,L3)}.
模型合并规则(3).模型合并规则(3)也叫作模型间标准化规则.如果E2′!=E3′且F2=F3,即系统参数s的物理影响因素不同,但在系统代码中的函数位置相同.合并规则为E={E2′,E3′},关系模型R中F=F2(F3),VC执行模型计算规则,L取L2和L3中的最小值,即L=Min{L2,L3}.在组合条件下,系统参数的值value(s)取影响级别最大的值,即Worst{value2(s),value3(s)}.
这里不存在E2′=E3′且F2=F3的情况,因为在一个环境模型M(s,E′,R)中,对于一个系统参数s和特定的E′,R是具有完备性的.当环境模型不符合合并规则的前提条件时,执行模型合并规则(1),对自身进行规范化操作.模型合并规则(2)和规则(3)是模型之间的合并规则,其中,系统参数是否在同一个函数中是决定环境模型之间是否可以合并的关键.多于两个模型进行规范化合并时,两两执行合并规则,直到不满足合并的前提条件.当存在多种物理因素影响多个系统参数的情况时,依据模型合并的前提条件,分别将具有相同系统参数的数学模型遵循规则合并.
例 2:假设M2(s2,E2′,R2)中的E2′和M3(s3,E3′,R3)中的E3′不相等且F2=F3,R2={r21,r22},R3={r31,r32},其中,VC2={VC21,VC22},VC3={VC31,VC32}.关系模型的每一个元素的展开式如下.
R21:(F,VC21,L2)=(F,(value21(s),C21),L2).
R22:(F,VC22,L2)=(F,(value22(s),C22),L2).
R31:(F,VC31,L3)=(F,(value31(s),C31),L3).
R32:(F,VC32,L3)=(F,(value32(s),C32),L3).
现在对M2和M3两个模型进行合并,由本小节开始时的假设可知s2=s3,因此符合前提条件,可以进行合并.由E2′!=E3′且F2=F3,根据模型合并规则(3),合并后的模型M中E′={E2′,E3′},关系模型R中F=F2(F3),VC遵循组合规则“其中每两个元素取“&&”,得到的结果之间取“||””,最终的关系模型为R=((r21&&r31)||(r21&&r32)||(r22&&r31)||(r22&&r32)).以 (r21&&r31)为 例 ,(r21&&r31)=(F,(Worst{value21(s),value22(s)},C21(E2′)&&C31(E3′)),min{L2,L3}).
在例1中的模型M0(Battery,T,R0)和M1(Battery,H,R1)中,由于系统参数相同,都为Battery,满足模型组合的前提条件,即M0和M1可以进行组合.由于T!=H,即环境影响因素不同,分别是温度和湿度,所以符合模型合并规则(3).对M0和M1执行组合规则后形成的新模M为M=(Battery,{T,H},Worst{1,2})=(Battery,{T,H},1),R=(handle,(r01&&r11)||(r01&&r12)||(r02&&r11)||(r02&&r12),1),展开式如图4所示.
2.2.3 环境模型与伪代码的转换规则
对环境建立数学模型的最终目的是要将此模型组合到运行时监视模型中,使得在线监视过程加入了环境变化的影响,让安全属性能够在不确定的物理环境中一直满足.在组合之前,为了相关领域人员和测试开发人员都能够简单、明了地表达和实现数学模型,本文提出将伪代码作为中间转化代码.伪代码是一种算法描述语言,其结构清晰且可读性好,并且类似自然语言.用它来描述数学模型,可以使使用者以任何一种编程语言容易地、无歧义地实现算法.对于任意一个M(s,E′,R),关系模型为R(F,(value(s),C(E′)),L)的数学模型,转换规则分为以下几步.
(1) 根据关系模型中的F生成函数.
(2) 变量声明:在函数中,如果s不是函数的本地参数,生成一个s变量并初始化.
(3) 根据(value(s),C(E′))生成条件判断语句,其中,C(E′)为条件判断,value(s)为在当前条件下s的值.其中,特殊符号“||”在程序中代表“else if”.
(4) “U”符号出现,则重新生成一个新的函数,执行(1)~(3)步.环境模型转换为伪代码的关键是(value(s),C(E′)对的逻辑转换,将环境对系统参数的关系转换为程序逻辑语言,便于之后集成到监控模型中.第(2)步中的变量声明是伪代码中的语法需要,在监视模型中,s由模型中的事件捕获得到.
例3:在例2中,对模型M0(Battery,T,R0)和M1(Battery,H,R1)进行了标准化,得到数学模型M(Battery,{T,H},1),其中,关系模型R=(handle,(r01&&r11)||(r01&&r12)||(r02&&r11)||(r02&&r12),1).接下来,通过执行以下步骤,将M转换为伪代码.
(1) 依据R中的F生成handle函数.
(2) 声明battery变量,并赋值为0.在使用编程语言实现时,如果该变量已经存在于函数的参数列表中,则步骤2可省略.
(3) 根据关系模型中的VC关系建立if逻辑部分.
最终M伪代码如Pseudocode 1所示.将数学模型转化为伪代码后,测试开发人员则负责将伪代码实现为具体编程语言的程序并整合到运行时监视模型中,最后利用运行时验证工具对模型中描述的属性进行安全性验证.在本文中,运行时验证工具为JavaMOP,所以M模型的伪代码用Java实现后组合到监视模型中,如图5中为M的Java实现代码.
2.2.4 环境模型和运行时监视模型的组合规则
组合规则的目的是要将伪代码实现为具体编程语言的程序后组合到监视模型的事件操作部分,具体组合规则分为以下几个步骤.
(1) 遍历所有运行时监视模型的事件定义,选择事件切入点的函数和模型代码中的函数F相同的事件,且在事件操作中含有s参数参与计算.
(2) 选定代码块:其中,代码块的开始是第1条s在赋值等号右边的语句,代码块的结束时是最后一条s在赋值等号右边的语句.
(3) 将代码块作为整体替换模型代码中if条件控制的执行语句.如果存在一个代码块对应于多个模型代码的情况,即多个模型代码中的系统参数出现在同一个表达式中,此时将所有模型代码中的 if条件组合操作后的新模型代码替换掉原代码块.
(4) 赋值号右边的s被置换为模型代码中相同判断条件执行语句中的s的新值.
(5) 将最终形成的函数代码插入到当前事件中替换代码块.
连接点是切面插入应用程序的地方,包含函数的调用和执行、构造函数的调用和执行、变量的获取与设置等.而切入点的作用则是过滤这些连接点,匹配符合条件的连接点从而激活事件.它是连接点的子集合,在组合规则中,代码块的划分是关键,将修改目标锁定在系统参数参与计算的语句上,以便于添加环境条件.
例4:例3中生成M的伪代码后,使用Java语言编写函数实现伪代码中的算法逻辑,按照组合规则将其插入到运行时监视模型中,步骤如下.
(1) 遍历所有运行时监视模型的事件定义,并选择函数与handle相同的事件.如图6所示,在electricity验证模型的start、init和sufficientElectricity这3个事件中,只有init事件满足要求,且系统参数battery参与了危险距离b变量的赋值计算.
(2) 选定第1条battery在赋值等号右边的语句作为代码块的开始,最后一条battery在赋值等号右边的语句作为代码块的结束,划定代码块区域.如图6中红框所示,代码块包含b=battery×3.0÷w一条语句.
(3) 将代码块作为整体替换模型代码中if条件控制的执行语句,如图7所示.
将赋值号右边的battery置换为模型代码中相同判断条件执行语句中的battery的新值,如图8所示.最后,所获得的结果如图9所示.
3 实验评估
本文的实验平台选用了如图 10所示的 EV3机器人,它是乐高公司开发的第三代MINDSTORMS机器人,于2013年下半年上市.它不仅能够加载多种传感器,如超声波传感器、触碰传感器、陀螺仪等,而且还可以使用leJOS第三方库支持Java语言编程.实验中,传感器的采样频率设为1s,电池电压为3.0v,容量为1Ah.
实验设计为移动机器人匀速行驶执行避障任务[26,27],每一次执行时间至少需要 10min.机器人将使用超声波传感器和触碰传感器来感知周围环境避开障碍物.为了使移动机器人成功地执行避障任务,设定一条安全属性为“当电池续航不足10分钟时给出提示”.分析影响电池容量的环境因素,如例1~例4所示,将影响电池电容的温度和湿度建立环境模型并组合到electricity监视模型中去.已知存在关系式:容量(Ah)×电压(V)=功率(W)×时间(h),在满足电量条件下执行了6 000多次实验,实验结果见表1.
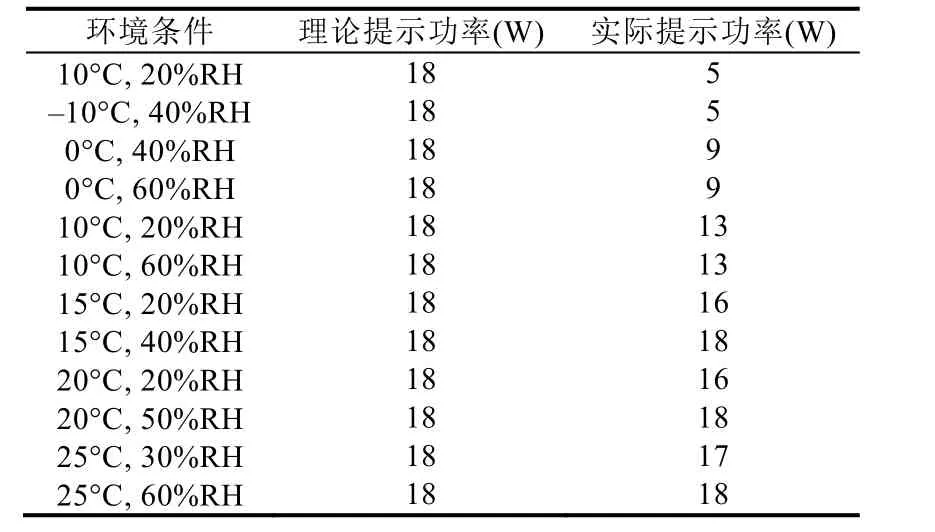
Table 1 Experimental results表1 实验结果
当不考虑环境影响因素时,理论上当移动机器人的功率为 18W 时,会提示“在当前功率下电池续航不足十分钟!”.但当环境中温度和湿度发生变化时会出现续航时间比提示时间略长或缩短的情况.由表 1可以看出,当温度在 15°C~35°C 时,电池电容与湿度有关.当温度在-10°C~15°C 时,电池电容只与温度有关,与湿度无关.将环境模型组合到运行时监视模型中,可以随着环境中温度和湿度的改变而调整电容值,从而调整安全提示的功率临界值.
实验结果表明,监视模型集成环境模型后,监视程序的执行将会更加精确,可以有效地保证在复杂工作环境下机器人系统的安全性和可靠性.该建模方法不仅可以用于移动机器人的安全电量监测,也适用于采用运行时验证方法保障系统的安全性和可靠性的CPS,不限制逻辑描述语言和操作系统类型.
4 总 结
本文提出一种面向实时数据的CPS一体化建模方法,对环境进行建模,然后对环境模型进行标准化,转化为伪代码后组合到监视模型中进行运行时验证,目的是使得监视模型更加完整、准确,在环境发生变化时,通过动态调整模型中的参数范围,使得 CPS中的安全属性在复杂的物理环境中仍然得以满足.该方法定义了模型合并规则、模型和伪代码之间的转换规则、环境模型和监视模型的组合规则,并通过温度和湿度对电池容量的影响举例加以说明.最后在移动机器人平台上,通过使用JavaMOP验证安全属性的实验证明在机器人系统中组合物理模型后可以使得监视模型的监视更加准确.
猜你喜欢
体育科技文献通报(2022年3期)2022-05-23
新高考·高二数学(2022年3期)2022-04-29
成都信息工程大学学报(2021年5期)2021-12-30
天津外国语大学学报(2021年1期)2021-03-29
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
初中生世界·九年级(2020年2期)2020-04-10
电子制作(2019年23期)2019-02-23
新高考·高二数学(2016年7期)2017-01-23
中学数学杂志(初中版)(2016年5期)2016-11-01
股市动态分析(2016年17期)2016-10-20