
基于神经网络滑模观测器的飞控系统故障诊断
2019-08-12 03:12权璐,姜斌,杨蒲
扬州大学学报(自然科学版) 2019年2期
权 璐, 姜 斌, 杨 蒲
(南京航空航天大学自动化学院, 南京 210016)
随着控制系统规模和复杂性的持续扩大, 对控制系统安全性和可靠性的要求也持续增加, 使系统微小故障的检测和诊断变得尤其重要[1-2].由于微小故障具有幅值较低、易被噪声和未知扰动掩盖、故障的特征不显著、不容易被察觉等特点,使微小故障诊断的难度增加[3-4].Chen等[5]通过对原系统进行分解,使微小故障项和未知扰动项分离,再分别针对两个子系统构造Luenberger观测器和滑模观测器, 达到了系统对微小故障敏感和对干扰鲁棒的目的,实现了对早期故障的有效检测;随后Chen等[6]基于未知输入观测器也实现了微小故障的检测,其残差仅对微小故障敏感; Demetriou等[7]将基于神经网络的故障诊断方法用于一类出现微小故障的非线性系统中; Zhang等[8]基于神经网络提出的非线性系统故障诊断方法也实现了微小故障的隔离和检测; Wu等[9]解决了Takagi-Sugeno模糊系统的微小故障检测和诊断问题.然而,仅运用滑模观测器很难做到对微小故障的检测,故本文提出了基于神经网络的滑模观测器, 并对系统中的微小故障进行了检测和估计.
1 系统描述
一类带有执行器微小故障和扰动的线性系统模型
(1)

2 系统解耦
2.1 坐标变换
将系统(1)分块表示为

(2)
2.2 系统解耦
(3)
(4)


3 神经网络滑模观测器设计
3.1 观测器设计
3.2 系统的稳定性

图1 飞控系统故障诊断试验平台Fig.1 Flight control system fault diagnosis test platform
4 仿真实验与结果分析
4.1 仿真实验

(5)

(6)
4.2 结果和分析

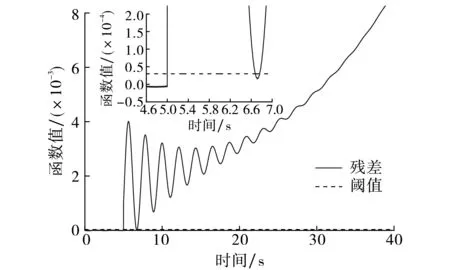
图2 基于神经网络滑模观测器的微小故障检测残差Fig.2 Incipient fault detection residual based onneural network sliding mode observer
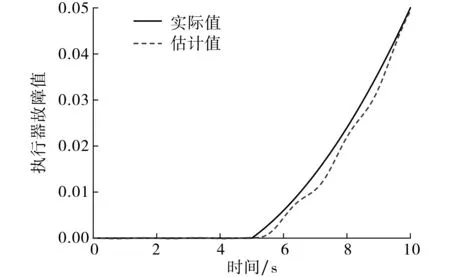
图3 飞控系统结构老化下微小故障的估计Fig.3 Estimation of incipient fault under the aging ofphysical structure of flight control system
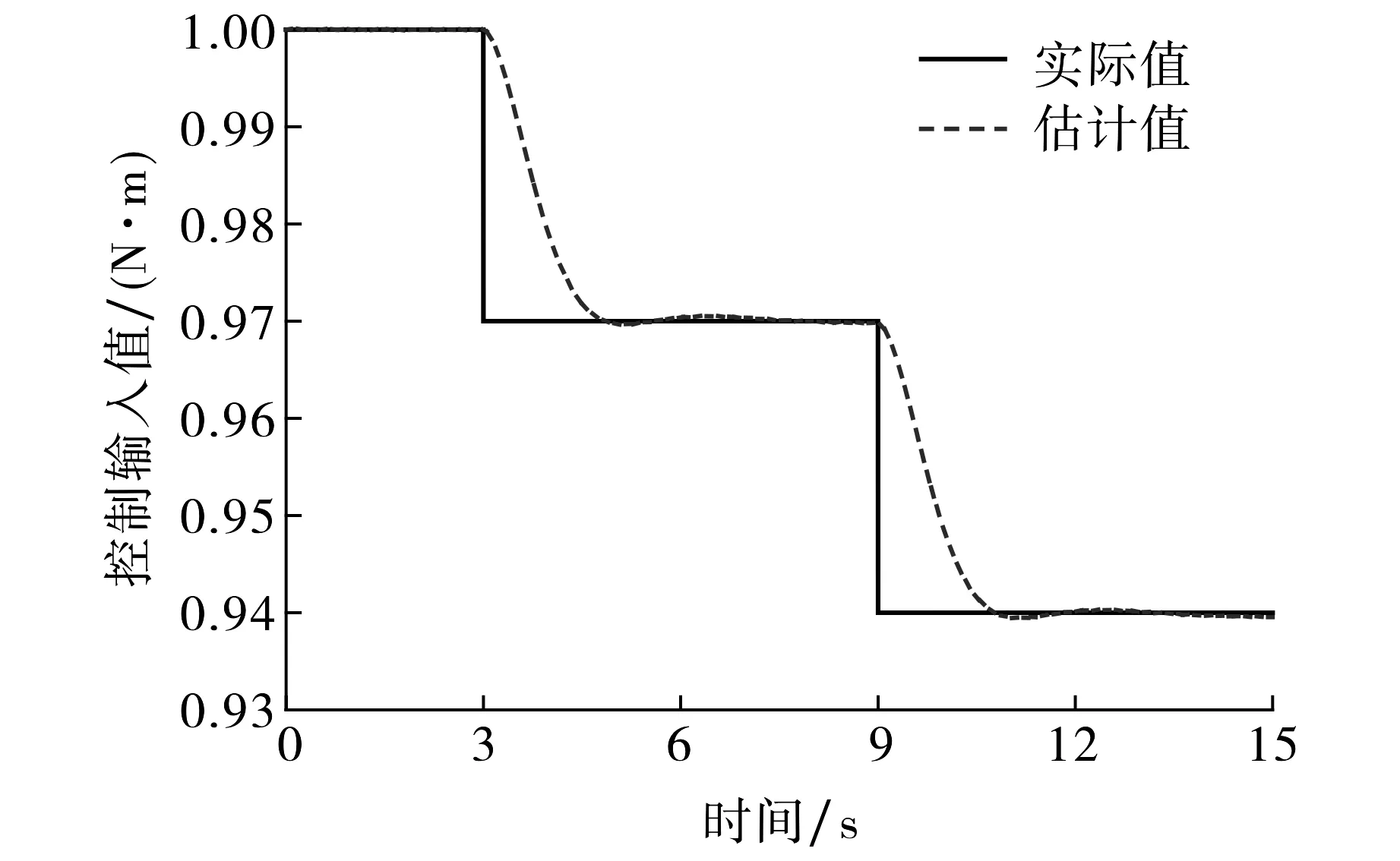
图4 飞控系统在气流扰动下控制输入的估计Fig.4 Estimation of control input under the flow perturbation of the flight control system

猜你喜欢
火力与指挥控制(2022年6期)2022-07-25
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
科学技术创新(2021年35期)2022-01-14
计算机仿真(2021年3期)2021-11-17
建材发展导向(2021年14期)2021-08-23
家庭影院技术(2021年3期)2021-05-21
航天工业管理(2020年9期)2020-12-28
北京航空航天大学学报(2020年10期)2020-11-14
航空发动机(2020年3期)2020-07-24
