控制器故障下固定翼无人机的姿态控制
2019-08-07 00:46刘永春曹立佳刘小芳
兵器装备工程学报 2019年7期
唐 余,刘永春,曹立佳,林 达,4,刘小芳
(1.四川轻化工大学 a.自动化与信息工程学院; b.物理与电子工程学院; c.计算机学院, 四川 宜宾 644000;2.四川省人工智能重点实验室, 四川 宜宾 644000; 3.四川省智慧旅游研究基地, 四川 自贡 643000;4.徐州工程学院 信电工程学院, 江苏 徐州 221111)
在当今社会的各个领域中,无人机已得到了广泛的应用[1-2],并将完成更多的任务。无人机经常进行高空长时作业,脱离人的直接操纵,在干扰或机体损伤的情况下,无法进行人工处理,其本身必须具备一定故障和失效的应对能力[3-4];但是,一旦控制器故障超出无人机应对能力范围,其飞行品质不可避免要降低,需要立即采取措施,可以通过设计可重构控制系统[5-6]来保证飞机安全。
可重构控制(Reconfigurable Control,RC)系统通常包括故障检测(Fault Detection,FD)系统[7-8]和控制器重构(Controller Reconfiguration,CR)系统[9-10],并能够与自适应控制器[11](Adaptive Controller,AC)相结合。
针对AC的设计,文献[12]采用反步积分法,这种方法在传统反步方法的基础上添加了跟踪误差的积分项,以此来弥补稳态误差;文献[13]提出采用动态逆方法,只需要构建出无人机的状态空间模型,即可同时求解出所有所需的控制器,极大的提高了运算效率;结合这两种方法的优点,得到一种增加误差积分项的动态逆方法,既能弥补稳态误差,又方便构造无人机控制器。
关于FD系统的设计,文献[14]提出采用构建多模型自适应估计(Multiple Model Adaptive Estimation,MMAE)的方法,它是基于一组并行的卡尔曼滤波器,其特点是每一个特定的故障都有一个相应的卡尔曼滤波器与之对应。
关于CR系统的设计,文献[9,13,15]提出采用控制分配方法,能在不增加冗余控制器的情况下结合无人机模型的性质构造出虚拟控制信号,然后通过其与正常控制器和故障控制器之间的相互关系重构无人机控制器。
AC能根据飞机的飞行情况实时地产生控制信号,具备一定的被动容错能力;但是,当一些故障超出其容错能力范围时,就需要FD系统能及时监测到这些故障行为,并为CR系统提供相关参数,CR系统利用这些参数并结合自适应控制器重新构造控制命令。
1 固定翼无人机建模
无人机的姿态在空间中的运动具有3个绕质心旋转的自由度,分别为滚转、俯仰和偏航运动;其副翼和升降翼相互作用产生滚转力矩和俯仰力矩,方向翼和副翼相互作用产生偏航力矩。
如图1所示,无人机的姿态运动涉及惯性坐标系、机体坐标系和气流坐标系,分别以字母n、b和w表示。其中α和β分别为无人机的攻角和侧滑角,可由下式求得:

(1)
式(1)中:m是无人机质量,其余参数见下文介绍。
考虑无人机相对于惯性坐标系的滚转、俯仰和偏航姿态角分别用欧拉角φ、θ和ψ表示,无人机相对于机体坐标系的姿态角速度分别以p、q和r表示。这些变量之间的关系如下:
(2)
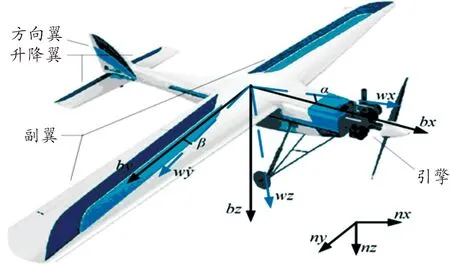
图1 固定翼无人机模型及坐标系
根据牛顿力学可推导出无人机姿态系统的动力学方程为:
(3)
式(3)中:Ib是无人机的转动惯量矩阵,并且Ωb=[pqr]T。
(4)
(5)

考虑到建立无人机姿态系统的矩阵模型,可以令:
x=[pqr]T,u=[δa1δa2δe1δe2δr]T
(6)
根据式(6),式(3)可以被重写成:

(7)
式(7)中:
(8)
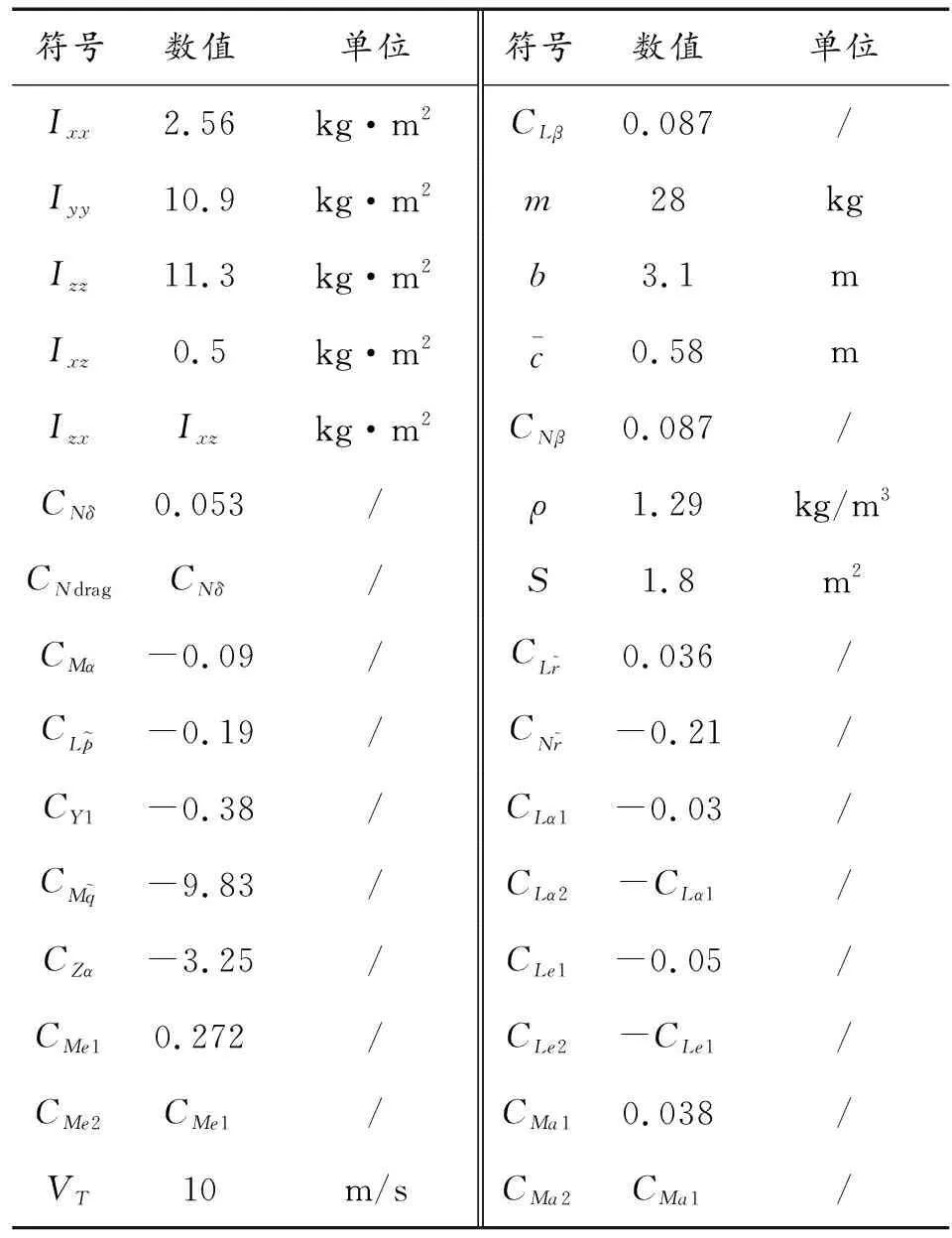
表1 仿真所需的固定翼无人机模型参数
2 可重构控制系统设计
可重构控制系统包括故障检测和控制重构部分,可与自适应控制器相结合,能及时检测到故障并重构无人机控制器。
图2中的xk+1/k+1和xd分别为x的估计值和期望值;pi(k)为控制器i发生故障的概率;δi,fault为控制器δi的故障状态;uf为无人机的实际控制输入;Cv为虚拟控制信号。
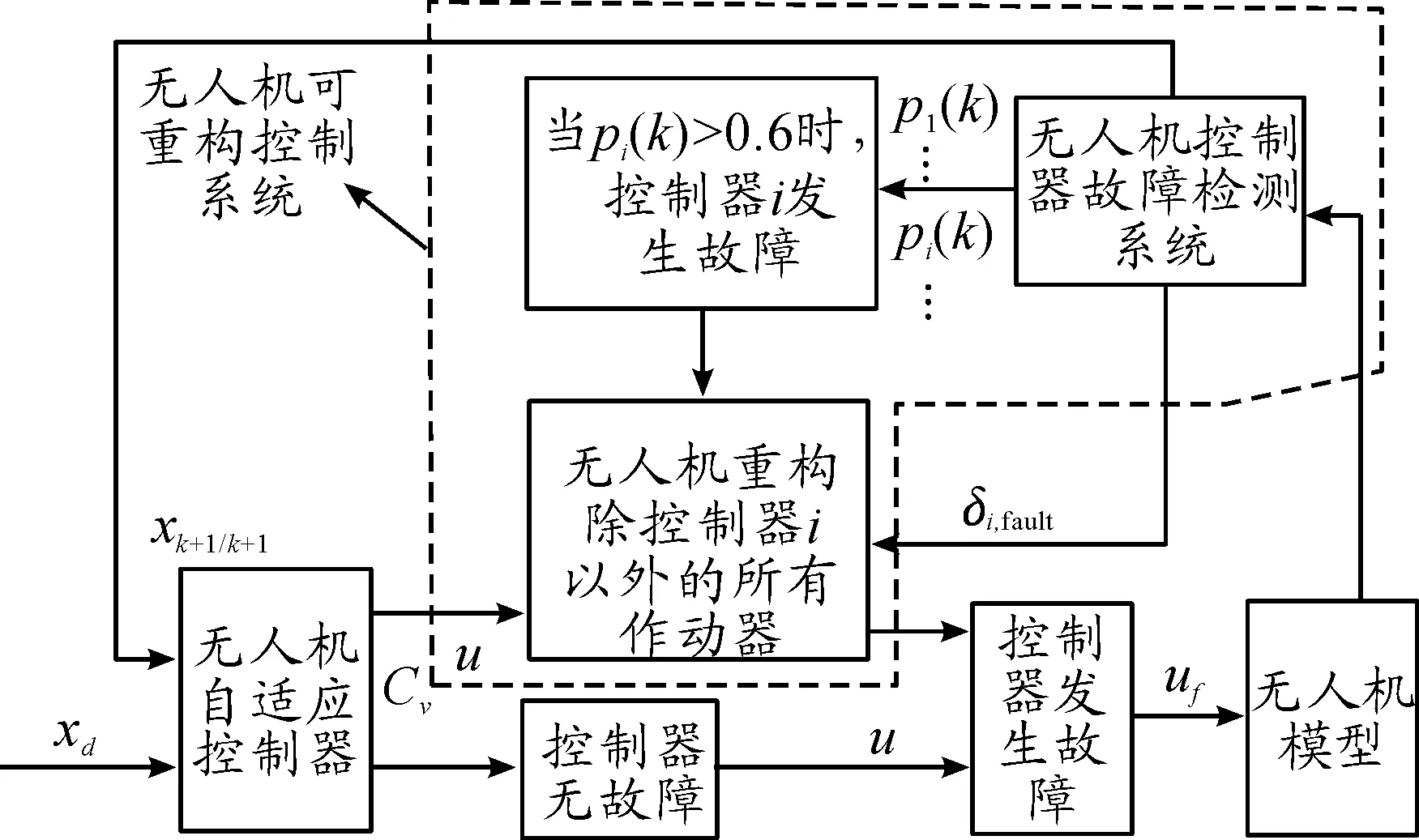
图2 无人机可重构控制系统
2.1 无人机自适应控制器设计
根据动态逆方法[15]并基于Lyapunov原理设计控制器向量u。
针对式(7),定义跟踪误差及其积分项:
(9)
根据式(9)定义一个Lyapunov函数为
(10)
式(10)中:λ>0,且V(K,e)≥0,即正定;并且,对式(10)求导并代入式(7)可得:
(11)
(12)
式(12)中:k>0,λ>0;F和G见式(8)。
2.2 无人机控制器故障检测系统设计
采用组合扩展卡尔曼滤波器[15]的方法检测控制器故障;其基本结构如图3所示。
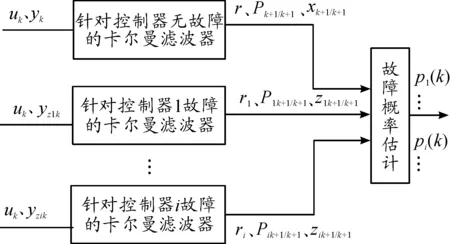
图3 控制器故障检测系统基本结构框图
针对控制器无故障的卡尔曼滤波器设计,首先将式(7)离散化后,用状态空间法表示为
(13)
式(13)中:xk、Fk、Gk和uk分别为其第k步长时刻的采样值;h为系统的采样间隔或步长;wk为零均值离散随机噪声,用以描述姿态系统中的不确定性。
姿态系统测量方程的离散形式可以被描述为
yk=Cxk+vk
(14)
式(14)中:C为观测矩阵;vk为零均值离散随机噪声,用以描述测量过程中的不确定性。
控制器无故障下的扩展卡尔曼滤波器设计流程如下:
(15)
式(15)中:xk/k为当前时刻的状态估计值,xk+1/k为其下一时刻的预测值;xk+1/k+1为状态估计值的更新。Pk+1/k是状态误差协方差矩阵的估计值;Pk+1/k+1是状态误差协方差矩阵的测量更新;r是测量值与估计值之间的残差;Lk是第k步长卡尔曼增益矩阵。Rw,k和Rv,k分别为wk和vk的协方差矩阵。
针对控制器故障下的卡尔曼滤波器设计,假设需要检测u中的第i个控制器故障与否,一个状态向量可以被重构为
(16)
(17)
式(17)中:G(i)为取G的第i列。G(0,i)表示将G的第i列置零。
重构后的姿态离散化后可表示为
(18)
式(18)的观测矩阵为:
yzik=Cfzik+vfk
(19)
式(19)的卡尔曼滤波器设计与式(15)相似,只需要将其中的x、Fk、Gk、C替换成zi、Fzi、Gzi和Cf。
设定概率密度为高斯函数,其表达式为:
p[y=yik|(δ=δi)]=
(20)
最后,通过下式即可估计控制器故障概率:
pi(k)=p[δ=δi]=
(21)
式(21)中:p0(k)为无故障概率;p1(k)~p5(k)分别为δa1、δa2、δe1、δe2、δr故障概率。
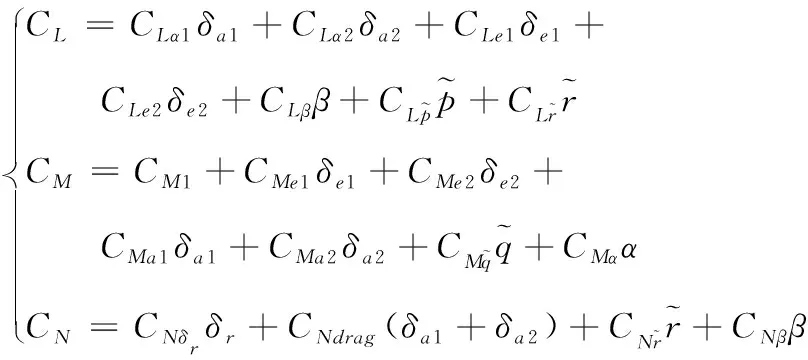
2.3 控制器重构系统设计
空气动力系数具有如下式的关系。
(22)
为了方便重构控制器,可以根据式(5)和式(22)构造虚拟控制指令为:
(23)
式(23)中:δa1、δa2、δe1、δe2和δr均由无人机自适应控制器提供。
情况1:针对单控制器故障,以δa1故障为例,其重构后的各控制器如下所示:
(24)
同理,其余单控制器故障的控制重构方案设计同式(24)。
情况2:针对双控制器故障,以δa1、δa2同时发生故障为例,其重构后的各控制器如下所示:
ξ1=(CM-CMa(δa1,fualt+δa2,fualt))/CMe
ξ2=(CL-CLa(δa2,fualt-δa1,fualt))/CMe
δe1=(ξ1-ξ2)/2,δe2=(ξ1+ξ2)/2
δr=(CN-CNdrag(δa1,fualt+δa2,fualt))/CNδr
(25)
同理,其余双控制器故障的控制重构方案设计同式(25)。
3 仿真与分析
实验仿真平台为Matlab,固定翼无人机相关物理参数如表1所示。
为了验证无人机可重构控制系统在复杂运动下的有效性,设无人机飞行状态为趋于一定高度的螺旋上升运动。设置3组仿真实验,其中两组仿真实验都是在相同的控制器故障下完成,一组在只为无人机提供自适应控制器,另一组则增加了可重构控制系统系统,这两组仿真实验将会一起与无控制器故障下的无人机仿真结果作对比;以此来分析可重构控制系统的有效性。
相关仿真结果如下:由图4、图5和图6可知,在时间段T1、T2、T3、T4、T5上控制器δa1、δa2、δe1、δe2、δr分别发生卡死故障,特别地,T2、T3、T4、T5均在T1内,在这种情形下,相比于单纯的自适应控制器(AC),增加了可重构控制系统的自适应控制器(AC-RC)能在极短的时间内检测出故障并重构无人机控制器,使无人机姿态控制更接近于理想情况,即无故障情形下的姿态跟踪;如式(5)所示,CL、CM、CN分别为控制无人机力矩的重要参数,只要这些参数相对于无故障情况下的变动不大,无人机的姿态就能以接近于无故障情况的运动,在图7中,当故障来临时,相比于AC,AC-RC能使这些参数在极短的时间内收敛于无故障情况,进而达到如图5所示的控制效果。
4 结论
由上述仿真结果可知,提出的可重构控制系统能及时检测出无人机控制器故障,并根据检测出的故障类型,在不增加冗余控制器而在原有健康控制器的基础上自主地进行控制器重构,进而达到理想的控制效果。通过与自适应控制器(AC)在故障情况下的控制效果进行比较,充分说明该系统对无人机姿态的控制效果更为理想,更接近于无故障情况下的控制效果。

图4 三种控制模式下的无人机姿态角曲线
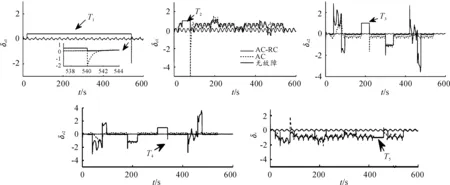
图5 三种控制模式下的无人机控制输入曲线
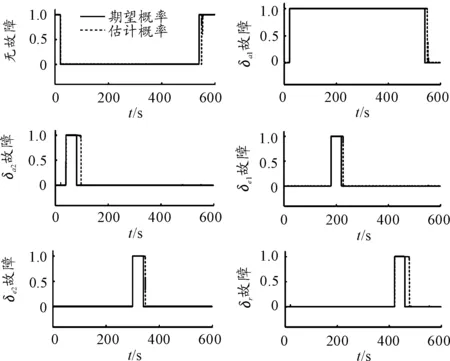
图6 无人机控制器故障概率估计曲线
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
当代陕西(2022年4期)2022-04-19
摄影世界(2022年1期)2022-01-21
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2021年7期)2021-08-13
学生天地(2020年3期)2020-08-25
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
电子制作(2019年23期)2019-02-23
天津诗人(2017年2期)2017-11-29