
混合背景下像素均值运动目标特征提取算法
2019-07-23 09:27陆兴华叶铭铭刘铭原
计算机技术与发展 2019年7期
陆兴华,叶铭铭,刘铭原
(广东工业大学华立学院,广东 广州 511325)
0 引 言
随着计算机图像处理技术的不断成熟,采用图像信息处理技术进行运动目标检测,在目标探测识别和导航定位中具有广阔的应用前景。对运动目标的检测是建立在目标特征提取基础上[1],结合目标图像的自适应成像和像素信息特征提取,进行目标定位和精确检测,研究运动目标特征提取和检测技术,在运动目标成像和三维特征识别中具有很好的应用价值,研究运动目标特征提取技术,在图像模式识别和探测制导控制中具有很好的应用价值[2]。
对运动目标的检测和三维特征提取包括两大步骤,首先进行运动目标图像的远程成像和像素特征分割处理,结合特征分割和自适应特征分离方法进行图像目标特征提取,然后采用像素均值技术进行图像三维特征提取,分析运动目标图像的边缘信息,实现运动目标的自适应成像处理,提高目标成像和识别能力[3]。传统方法中,对运动目标的特征提取技术主要有小波分析技术、超像素特征分割技术、模板匹配技术以及块匹配技术等。文献[4]中提出一种基于图形自适应渲染和纹理特征分割的运动目标图像特征三维提取技术,采用三维红外点扫描方法进行运动目标图像的纹理渲染和点跟踪识别,提高运动目标的检测和特征识别能力,但该算法进行运动目标特征提取的实时性不好,检测过程的收敛性不强;文献[5]中提出一种基于自适应特征分解的运动目标图像三维特征提取方法,建立运动目标图像的统计形状模型,采用自适应模板匹配方法进行特征分解,实现对运动目标图像轮廓特征提取和重构,提高运动目标图像的三维特征提取能力,但该算法在混合差分背景下的检测准确性不好。
针对传统方法存在的弊端,文中提出一种基于混合背景差法和像素均值技术的运动目标提取算法。首先构建运动目标的三维成像模型,对运动目标图像采用混合差分背景分割方法进行图像的模板匹配和自适应分割处理。然后对运动目标图像的像素信息采用帧分解和像素均值技术进行运动目标的特征提取,实现混合差分背景下的像素均值运动目标特征提取。最后进行仿真实验分析,验证该方法在提高运动目标特征提取和检测能力方面的优越性能。
1 运动目标图像三维结构模型和分割处理
1.1 运动目标图像三维分块结构模型
为了实现运动目标图像的三维特征提取和检测优化,首先构建运动目标的三维成像模型。采用红外扫描技术进行运动目标的原始图像采集,在运动目标图像像素特征分布的仿射不变区域中提取运动目标图像的三维特征量,结合边缘轮廓检测和特征重构技术[6],进行图像的分块匹配和信息融合处理,得到的运动目标图像三维成像模型如图1所示。
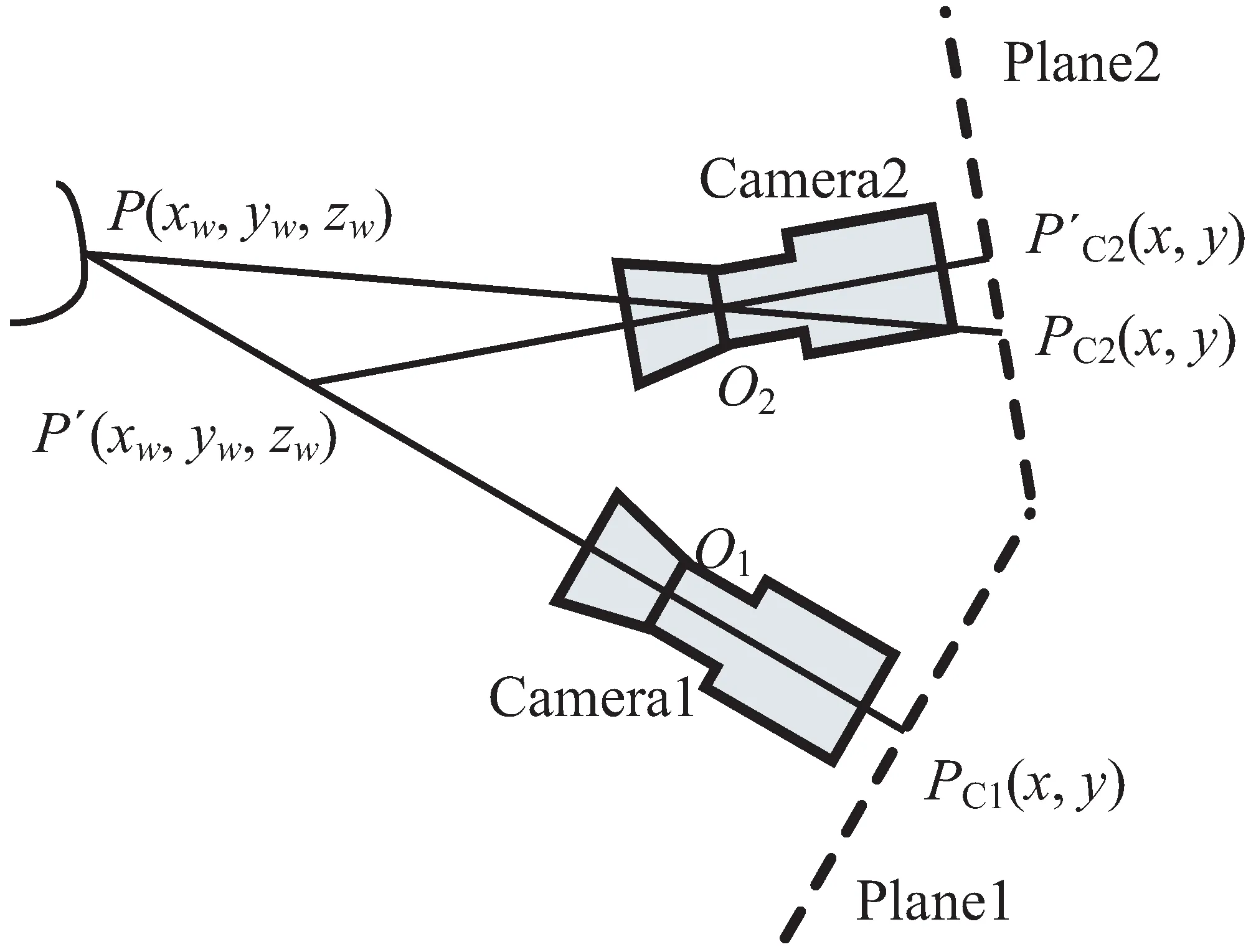
图1 运动目标的三维成像模型
在图1所示的运动目标图像特征采集模型中,采用两个红外图像采集传感器进行目标图像的运动特征提取。在成像三维拓扑结构模型中,假设图像采集节点P,运动目标图像特征采集的基准坐标为(XW,YW,ZW)。O1和O2是运动目标图像特征采集节点Camera1和Camera2的像素中心位置,Plane1和Plane2是运动目标特征提取的模板配准平面,构建三维坐标系,以Camera1和Camera2为坐标轴构建运动目标图像的成像平面。采用RGB特征分解方法进行运动目标的颜色空间分解[7],设{w1,w2,…,wdi}表示三维运动目标成像的关联分布权向量,在混合差分背景下,运动目标成像的边缘轮廓长度为L=xmax-xmin,目标模板匹配的宽度为W=ymax-ymin,高H=zmax-zmin,设运动目标图像的分块模型f(xi,yi)的任一特征点f(xi+m,yi+n)为三维像素分布的角点,采用如下4个向量量化函数x1,x2,x3和x4进行图像的向量量化处理:
(1)
其中,m为目标图像的三维分块维数。

(2)
其中,L(η)表示运动目标图像的像素配准系数。采用二值化处理进行图像的边缘分割,采用像素均值分割技术进行运动目标图像重建[8]。
1.2 图像分割处理
对运动目标图像采用混合差分背景分割方法进行图像的模板匹配和自适应分割处理,运动目标图像的边缘像素集表示为:
Iif(x,y)=I*G(x,y,σi)
(3)
Iiv(x,y)=I*stdfilt(x,y,wi)
(4)
Sgif(x,y)=-log(Pif(x,y))
(5)
其中,G(x,y,σi)表示运动目标三维成像在4×4子网格区域内的颜色空间像素值。
采用多维像素重组方法,构建模板匹配系数θ(k)、Δx(k)和Δy(k),三维运动成像的特征融合分量为:
I(x)=J(x)t(x)+A(1-t(x))
(6)
其中,A为运动目标图像三维分块尺度信息;t(x)为像素分布密度;J(x)t(x)为边缘轮廓点的像素强度。
将图像的前一帧作为参考帧,采用图像统计信息和梯度信息融合方法,得到信息融合结果s(X,Y),图像的模板差异值表示为:
(7)
其中,assoc(A,V)是活动轮廓向目标边缘演化的像素点子集;assoc(B,V)也是类似的定义,采用灰度像素特征分解,得到活动轮廓分割值:


轮廓曲线C将图像划分为互不重叠的混合差分像素区域,即:
(9)
其中,Ic(y)为初始像素集;Ac表示轮廓的长度。
根据上述对三维运动图像的分割处理,提高运动目标的特征提取能力。
2 运动目标特征提取优化
2.1 像素特征提取和像素均值技术
在构建运动目标的三维成像模型,对运动目标图像采用混合差分背景分割方法进行图像的模板匹配和自适应分割处理的基础上,进行运动目标特征提取。文中提出一种基于混合背景差法和像素均值技术的运动目标提取算法。结合几何边缘重构方法进行运动目标的像素特征提取[9-11],对运动目标图像的像素信息采用帧分解,得到边缘轮廓的特征分解的基函数为:
(10)
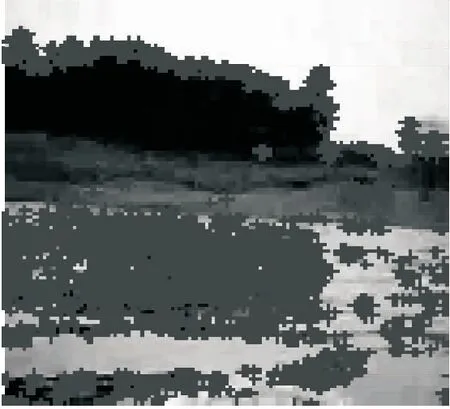
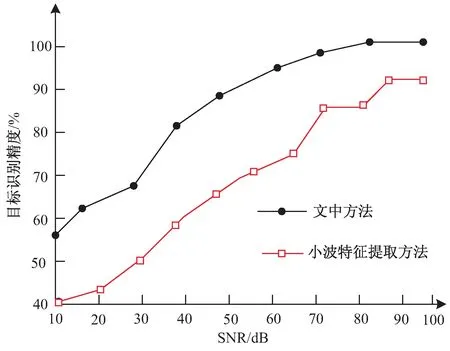
在区域分割模板m*n内对水平集图像进行初始化处理,得到新的局部区域活动轮廓模型为t(x)=e-βd(x),其中0 (11) 采用模板匹配技术进行图像像素均值处理[12],得到混合差分函数为: r(t)=αAcos(2π(f0+fd)(t-d))+w(t) (12) 采用像素均值技术,得到运动目标图像的平滑函数为: ind(P)={(x,y)∈U2|a(x)=a(y),∀a∈P} (13) 采用NCut准则进行图像像素均值分割[13],得到混合差分特征量见式7。 在满足NCut值最小的约束条件下,结合局部梯度分解方法,得到运动目标的特征分解式为: (14) 对提取的特征点采用图形跟踪渲染方法进行信息融合和特征提取处理,结合混合差分背景分离方法,提高图像特征提取能力[14]。 对运动目标图像的像素信息采用帧分解和像素均值技术进行运动目标的特征提取,结合二值化处理技术进行运动目标的边缘轮廓检测和特征搜索。设运动目标图像的分块模型f(xi,yi)的任一特征点f(xi+m,yi+n)为三维像素分布的角点,局部评价亮度信息满足(-1≤m≤1,-1≤n≤1,m≠0,n≠0),基于区域的活动轮廓模型进行边缘轮廓检测,采用角点检测方法进行运动目标图像纹理渲染。令R(x,y)表示运动目标图像的参考点和特征点的关联系数,det(u(x,y,σI,σD))表示图像的梯度模,trace(u(x,y,σI,σD))表示矩阵的迹,根据变分法和Euler-Lagrange方程进行运动目标图像特征提取,分为如下几个步骤实现: Step4:用规则化的Heaviside函数进行像素均值处理,把满足收敛条件的运动目标图像作为参考图像,把满足Step1、Step2、Step3步骤的图像三维特征提取值作为参考特征值,计算运动目标图像特征提取信息熵: (15) 其中,X={Xt|t∈T}表示能量泛函。 Step5:采用混合差分算法和像素均值技术,实现对运动目标的特征提取和目标参数估计。 综上分析,文中设计的运动目标特征提取算法实现流程如图2所示。 为了验证文中方法在实现运动目标图像三维特征提取和优化识别中的应用性能,对其进行仿真实验。实验中运动目标图像算法处理实验部分采用Matlab 7设计,运动目标图像的特征分解尺度设定为2.4,模板尺度为300*300和500*500,像素集为250*250,θ=0.5,λ1=1,λ2=1,μ=0.001*255*255,ν=1,图像的空间像素欠采样值为dxy=3,噪点强度为5 dB和12 dB,运动目标成像的分辨率为2 000*2 000。根据上述仿真参量设定,取两组采集的运动目标图像Boat和GULF进行测试,得到原始的运动目标图像如图3所示。 (a)Boat (b)GULF图3 原始图像 以图3的原始图像作为研究对象,进行运动目标的特征提取和像素均值分割处理,得到的特征提取结果如图4所示。 (a)Boat (b)GULF图4 运动目标图像的特征提取结果 分析图4得知,采用文中算法进行运动目标特征提取的图像处理能力较好,特征提取的准确性较好,提高了运动目标的特征提取和检测能力。测试不同方法进行特征提取的输出质量,得到的对比结果如图5所示。 图5 运动目标特征提取性能对比 分析图5得知,文中方法进行运动目标特征提取的输出图像质量较高,说明特征提取性能较好,对目标的检测能力有较大提升。 提出一种基于混合背景差法和像素均值技术的运动目标提取算法。构建运动目标的三维成像模型,对运动目标图像采用混合差分背景分割方法进行图像的模板匹配和自适应分割处理,结合几何边缘重构方法进行运动目标的像素特征提取,对运动目标图像的像素信息采用帧分解和像素均值技术进行运动目标的特征提取,结合二值化处理技术进行运动目标的边缘轮廓检测和特征搜索,实现混合差分背景下的像素均值运动目标特征提取。研究结果表明,采用该算法进行运动目标特征提取的图像处理能力较好,输出图像质量较高,特征提取的准确性较好,提高了运动目标的特征提取和检测能力。该算法在目标识别和检测方面具有重要应用价值。2.2 运动目标特征提取输出
3 仿真实验与结果分析


4 结束语
猜你喜欢
上海师范大学学报·自然科学版(2022年3期)2022-07-11
扬州大学学报(自然科学版)(2021年6期)2021-02-14
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年15期)2019-08-27
电子制作(2019年15期)2019-08-27
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
电机与控制学报(2018年9期)2018-05-14
数学大世界(2018年35期)2018-02-22
