
小型长航程AUV续航力分析
2019-07-16 06:17秦玉峰齐占峰彭家忠冯志涛
水下无人系统学报 2019年3期
秦玉峰,齐占峰,彭家忠,史 健,冯志涛
(1.国家海洋技术中心,天津,300112;2.海洋能源利用与节能教育部重点实验室,辽宁 大连,116024)
0 引言
自主水下航行器(autonomous undersea vehicle,AUV)是一种自主推进,具有水下操控及感知作业能力的新型海洋监测设备[1-2]。小型长航程AUV(long-range AUV,LRAUV)是针对当前海洋大范围长时序观测要求开发的一种用于海洋长周期巡航监测的新型AUV系列,具有小型化、易携带、航程大等特点[3],较之传统 AUV(如文献[4]提到的混合驱动AUV最大续航里程仅为116 km),其航程可达上千千米。当前在长航程 AUV的研制方面主要有英国南安普顿研究中心研制的Autosub LRAUV[5-6],美国蒙特利湾水族馆研究所研制的Tethys LRAUV[7-8]以及美国海军研究局研制的太阳能自主航行器(solar AUV,SAUV)[9],3种典型的长航程 AUV的续航里程均已达到上千千米,Autosub LRAUV和Tethys AUV都属于中大型 AUV,体积和质量较大,携带的能量较多,SAUV能源补给方式有别传统AUV,其主要利用太阳能作为源源不断的能量供应。文献[10]和[11]提出了小型 AUV 的高效推进方法,文献[12]和[13]对小型长续航力潜水器的螺旋桨推进技术进行了研究,获得了双叶螺旋桨的高效推进性能。
上述文献针对中大型及太阳能供电的长航程AUV进行了续航力的研究,提供了一些高效推进的方案及方法,然而针对60 kg级小型化AUV的续航力研究还较少。随着海洋观测技术的发展,人们对自主移动平台续航力及便携性提出了更高的要求。文章从实际需求出发,研究小型LRAUV的续航力,以能耗分析作为研究基础,分析不同航行模式下最大有效航程,在有限的能源携带前提下获得提高小型AUV续航力的方法。
1 驱动原理及结构参数
1.1 驱动原理
小型LRAUV整合传统AUV及水下滑翔机的动力推进方式[14],结合低速推进和浮力驱动技术,其巡航速度为 1~4 kn。低速推进是小型LRAUV实现海洋水体大范围巡航的先决保障,最低速为 1 kn,高效推进时速度为 2 kn(经济航速),机动观测时速度为 4 kn(机动航速)。小型LRAUV相较于传统AUV,其仅有1套螺旋桨推进器置于机体尾部,此种螺旋桨为双叶结构且直径较大,低速时具有较高的推进效率,高速时具有较大的推力,即“低速下高效,高速下高能”,既可实现常规推进状态下高效率的推进,同时又可实现机动观测时的高速要求。小型LRAUV的航行过程如图 1所示,既可漂浮于水面航行,亦可悬浮于水下定深推进。直线航行由尾部低速螺旋桨推进,下潜和上浮运动依靠浮力驱动,通过浮力调节模块调节自身相对于周围水体的净浮力获得下潜和上浮的动力。当处于水面需要下潜时,浮力调节模块进行吸油动作,调整小型 LRAUV净浮力为负值进行下潜,下潜的同时姿态调节模块工作调节机体下潜的姿态,使之呈“前俯后仰”态,在下潜过程中获得一定的前向运动;当小型LRAUV处于水下需要上浮时,浮力调节模块进行排油动作,调整净浮力为正值进行上浮,上浮的同时姿态调节模块工作调节机体上浮的姿态,使之呈“前仰后俯”态在上浮过程中同样获得一定的前向运动。

图1 小型长航程自主水下航行器航行示意图Fig.1 Running schematic of small long-range autonomous undersea vehicle(LRAUV)
1.2 结构参数
小型LRAUV侧重于小型化、轻量化、便携性及长续航力等技术层面的研究,以 60 kg级续航达到或超过1 000 km为技术突破点,其特征参数如表1所示。小型LRAUV主体采用扩展性和易用性较强的模块化三段式结构[15],如图 2所示。各舱段内有相对独立的功能模块,如浮力调节模块、姿态调节模块、动力推进模块、尾部转向模块、定位及通信单元以及传感器模块等。
2 续航力分析
2.1 能量计算
小型LRAUV搭载24 V高能锂离子电池,有2种能源搭载形式,分别为一次锂电池组和二次锂电池组。二次锂电池组容量为175 Ah,一次锂容量为475 Ah。以二次锂电池组计算为例,如图3为二次锂电池的实测放电曲线。
由图 3可知,电池电压与放电量基本呈线型关系,只是各放电段斜率不同,以放电量 10 Ah进行分段,直至结束放电时释放出173 Ah电量为止,分段计算各放电段电量,并进行累加即为锂电池组的电池容量。各放电段初始放电电压记为Ui,结束电压记为Ui+1;上一放电段的结束电压即为下一放电段的开始放电电压;各分段释放电量记为Ci,电量差值记为 ΔCi。读取图 3放电量与电池电压关系图,可得各分段的电压、电量及电量差,如表2所示。
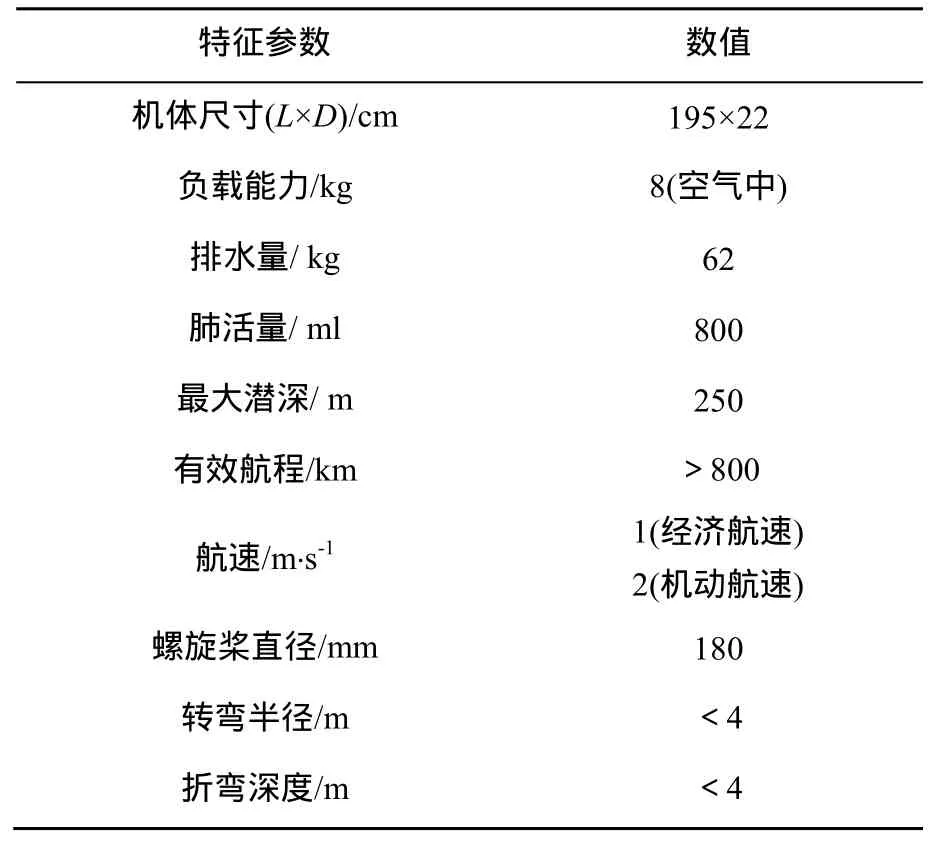
表1 小型LRAUV主要特征参数Table1 Main characteristic parameters of small LRAUV
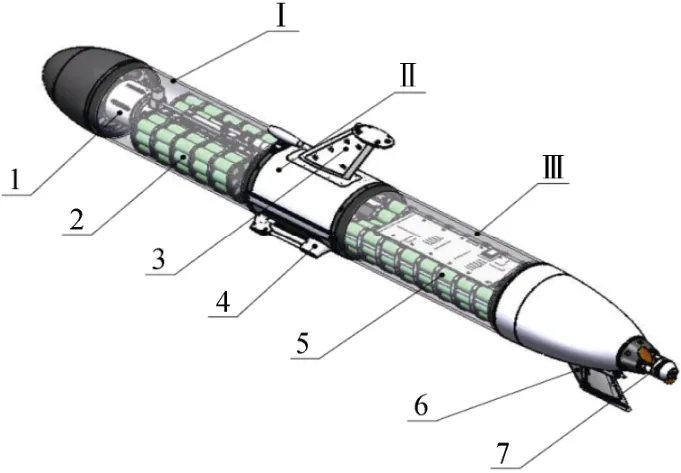
图2 小型LRAUV模块化布局Fig.2 Modular layout of small LRAUV
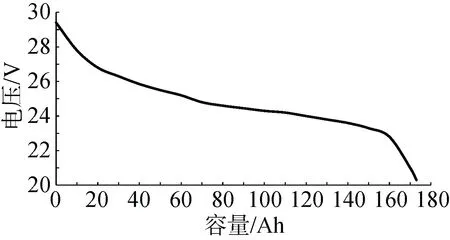
图3 二次锂电池实测放电曲线Fig.3 Measured discharge curve of secondary Lithium battery
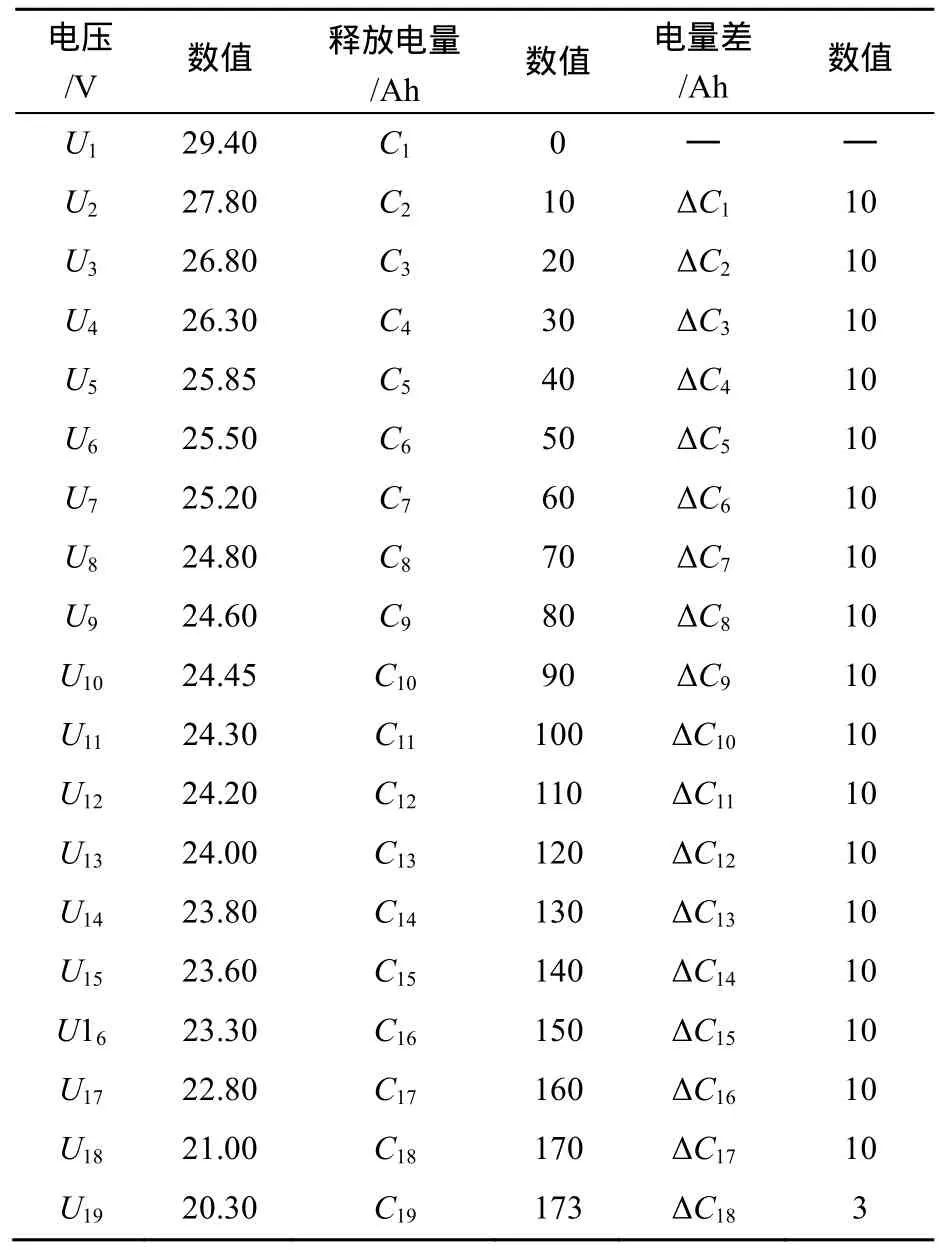
表2 各分段的电压、电量及电量差参数Table 2 Parameters of voltage,quantity of electricity and electricity difference of each segment
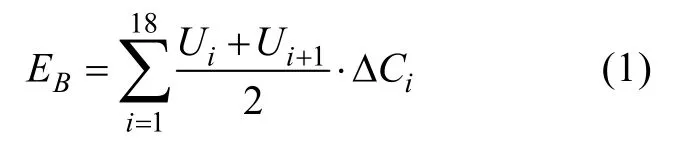
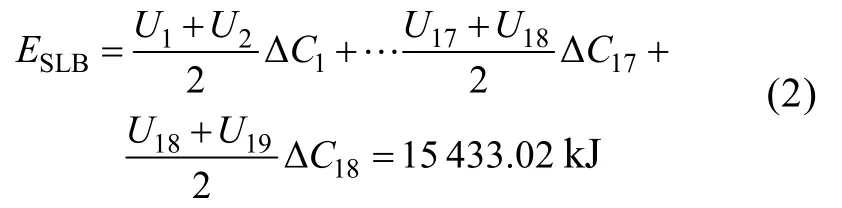
锂电池组总电量可表示为
若小型 LRAUV携带一次锂电池组,由一次锂电池组和二次锂电池的电量关系,得其电量为

为方便分析小型LRAUV在不同航行模式下的有效航程,文章仅针对二次锂电池组进行续航力分析,可记电池组电量

2.2 水面悬浮
小型LRAUV航行模式包括水面悬浮、水下定深以及水面悬浮和水下定深混合航行3种航行模式。水面悬浮航行时的能耗主要来自于动力推进的螺旋桨模块、定位及通信单元以及控制、导航及其他电子设备功耗等三部分。
螺旋桨推进模块系统能耗
控制、导航及其他电子设备能耗

通信及定位系统能耗

水面悬浮运动时小型LRAUV总功率

其中:Pp为推进器功率;cP为控制、导航及其他电子设备功率;Pcp为通信及定位系统功率;ts为水面悬浮航行时间。
水面悬浮运动时小型LRAUV总能耗

小型 LRAUV完成最大距离航行时,系统能耗即为锂电池组所携带的能量,则

因此小型LRAUV水面悬浮时的航行时间可表示为

小型LRAUV总航程可表示为

水面悬浮航行时仅有中间通信天线露出水面,机体仍处于水面以下,阻力状态与机体完全置于水下定深航行时相差无几。螺旋桨推进模块的能耗主要用于克服小型 LRAUV航行时的水阻力,航行水阻力与机体航速相关,机体航速越大,阻力越大,反之亦然。航行水阻力的近似表达式

螺旋桨推进模块功耗可表示为

式中:ρ为水体密度;Cd为机体阻力系数;A为机体迎流面积;v为航速;tη为螺旋桨推进器的推进效率。
为更好地了解小型 LRAUV的整体运动形态及水阻力变化,采用计算流体力学(computational fluid dynamics,CFD)方法分别计算不同航速下小型LRAUV的阻力变化。由仿真计算结果得,1 kn航速时其航行阻力为1.72 N,4 kn航速时的航行阻力为 22.5 N,各航速下的水阻力分析结果如表3所示,4 kn航速下的压力分布云图如图4所示,机体头部为迎流面阻力较大,尾部为背流面阻力较小,平均阻力系数为0.277 2。分析表3及图4结果可知,小型LRAUV壳体具有良好的流体动力线型,流体阻力较小。
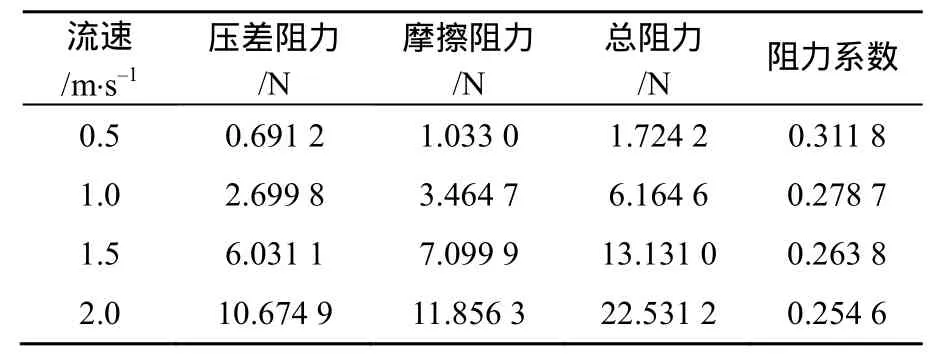
表3 水阻力流体动力分析结果Fig.3 Fluid dynamics analysis results of water resistance
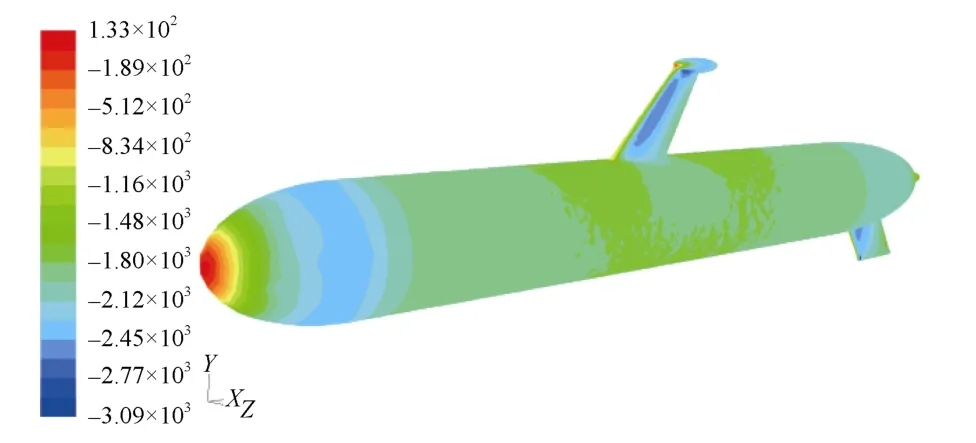
图4 小型LRAUV压力分布云图Fig.4 Pressure distribution contour of small LRAUV
小型 LRAUV为实现长航程的续能要求,采用一种特殊的低速高效双叶螺旋桨推进器推进,该型螺旋桨结合无导流、小推力、低转速、磁力耦合等高效推进技术,具有直径大、转速低、盘面比小、推进效率高等特点,已成功应用于混合驱动水下滑翔机[13,16],图 5所示为该型螺旋桨的双叶结构模型。
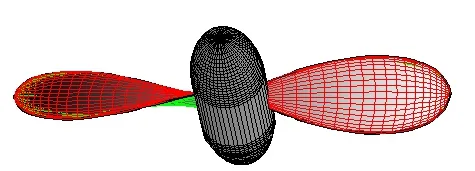
图5 双叶螺旋桨结构模型Fig.5 Structure model of double-blade propeller
螺旋桨推力、转矩和效率计算公式
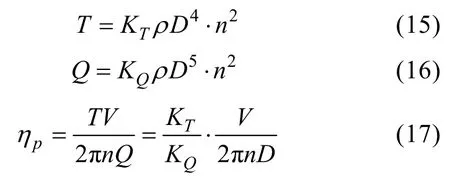
式中:KT为推力系数;KQ为转矩系数;V为螺旋桨进速;D为螺旋桨直径;n为螺旋桨转速。
螺旋桨推进器的推进效率可表示为

式中:ηm为电动机效率;ηg为减速机效率;ηp为姿态调节模块工作效率。
由文献[16]的分析结果可知,该型螺旋桨低速推进效率为 0.73,推力为 8 N,高速推进效率0.55,推力 60 N,螺旋桨推力、效率与转速间的对应关系如图6所示。根据小型LRAUV水阻力的 CFD仿真结果,小型 LRAUV最大水阻力为22.5 N,螺旋桨的转速达到720 r/min即可,此时的推进效率为0.66。螺旋桨推进器电机效率为0.9,减速机效率 0.83。由式(18)得螺旋桨推进器低速推进效率为0.55,高速推进效率为0.49。
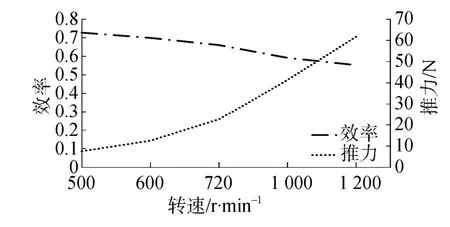
图6 不同转速下螺旋桨推力和推进效率Fig.6 Thrust and propulsive efficiency of propeller at different rotary speeds
螺旋桨推进器低速推进功率可表示为

高速推进功率可表示为

式中:VL为经济航速;VH为机动航速。
实测可知,小型 LRAUV控制、导航及其他电子设备的平均功耗Pc=5W,通信及定位系统的平均功耗Pcp=3W,小型LRAUV低速推进时的 航 速vL=1m/s,高速推进时vH=2m/s,由式(5)~式(12)及式(19)~式(20)可得小型LRAUV低速推进时的有效航程

高速推进时的有效航程

由结果可知,水面悬浮运动时,小型LRAUV低速推进可获得最大约804 km的有效航程,高速推进时可获得约309 km的机动航程。
2.3 水下定深
水下定深航行分为下潜、悬停、定深推进、上浮及定位和数据传输等过程,小型 LRAUV在完成水下定深航行后进行一次定位及数据传输,持续时间约为60 s。水下定深航行时的系统能耗主要包括下潜能耗Wd、定深推进能耗Wdmt、上浮能耗Wu及上浮后的定位及数据传输能耗Wdmcp,小型 LRAUV完成一次定位和数据传输,其能耗Wdmcp=180W 。则小型LRAUV水下定深航行时的系统能耗可表示为

水下定深航行时的有效航程可表示为

式中:Sd为下潜运动时的有效航程;Su为上浮运动时的有效航程;Sdmt为水下推进时的有效航程。
2.3.1 下潜及上浮
浮力调节模块和姿态调节模块仅在小型LRAUV进行上浮和下潜的开始阶段工作,做下潜运动时,浮力调节模块进行吸油动作,使之净浮力为负值,姿态调节模块调整机体姿态使之处于前俯后仰姿态后滑翔下潜;当小型 LRAUV需要做上浮运动时,浮力调节模块进行排油动作,使之净浮力为正值,姿态调节模块调整机体姿态使之处于前仰后俯姿态后滑翔上浮。小型LRAUV进行一次的上浮和下潜运动,浮力调节模块和姿态调节模块组成一次完整的泵系统循环。下潜运动能耗包括浮力调节模块下潜运动能耗Wdb,姿态调节模块下潜能耗Wdp,控制、导航及其他电子设备能耗Wdc等三部分,下潜过程中,通信及定位天线潜入水下无法定位和数据传输,因此处于关闭状态,没有能耗,则下潜运动时的能耗可表示为

浮力调节模块能耗可表示为

式中:Pdb为下潜运动浮力调节模块功率;tb为浮力调节模块工作时间;ηb浮力调节模块总效率;η1为电机端效率;η2为丝杠螺母幅效率;η3为柔性卷边柱塞泵效率。
姿态调节模块系统能耗可表示为

式中:Pdp为下潜运动姿态调节模块功率;tp为姿态调节模块工作时间。
控制、导航及其他电子设备能耗可表示为

式中,td为下潜运动持续时间。
上浮运动能耗包括浮力调节模块上浮运动能耗Wub、姿态调节模块上浮运动能耗Wup及控制、导航及其他电子设备上浮能耗Wuc等三部分,则上浮运动时系统能耗可表示为

浮力调节模块能耗可表示

式中,Pub为上浮运动浮力调节模块功率。
上浮和下潜垂向速度相同,持续时间相同,因此姿态调节模块上浮时系统功耗与下潜时系统能耗相等,可表示为

控制及其他电子设备的上浮和下潜过程中能耗相等,可表示为

小型LRAUV完成一次上浮和下潜的循环动作能耗可表示为
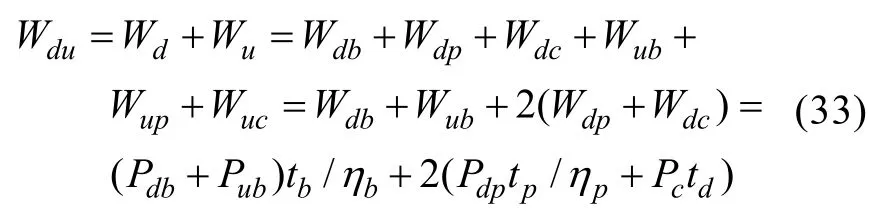
式中:Pup为上浮运动姿态调节模块功率;tu为上浮运动持续时间。
小型LRAUV浮力调节模块与周围海水相连,其浮力调节模块的能耗取决于外部负载,外部海水压力大则能耗大,外部海水压力小则能耗小。通过外接压力泵系统模拟海水压力连接小型LRAUV的浮力调节模块进行不同压力下的能耗测试,蓄能器可保证小型 LRAUV浮力调节模块往复运动时测试管路内的压力恒定,对同一模拟压力下进行多次往复运动测试以获得不同海水压力下浮力调节模块功耗,浮力泵系统能耗测试原理及实测现场如图7、图8所示。经实测,浮力调节模块空载时能耗为24.2 W,200 m压力负载时能耗为 130 W,实测功率与压力深度的测试曲线如图9所示。实测功率包括传动系统的效率损失,即电机端、丝杠螺母副、柔性卷边柱塞泵等效率损失,即小型LRAUV处于水面做下潜运动时浮力调节模块功率Pdb/ηb=24.2W,处于200m水深做上浮运动时Pub/ηb=130W。此外,姿态调节模块实测功率为4.8W,即Pdp/ηp=Pup/ηp=4.8W。
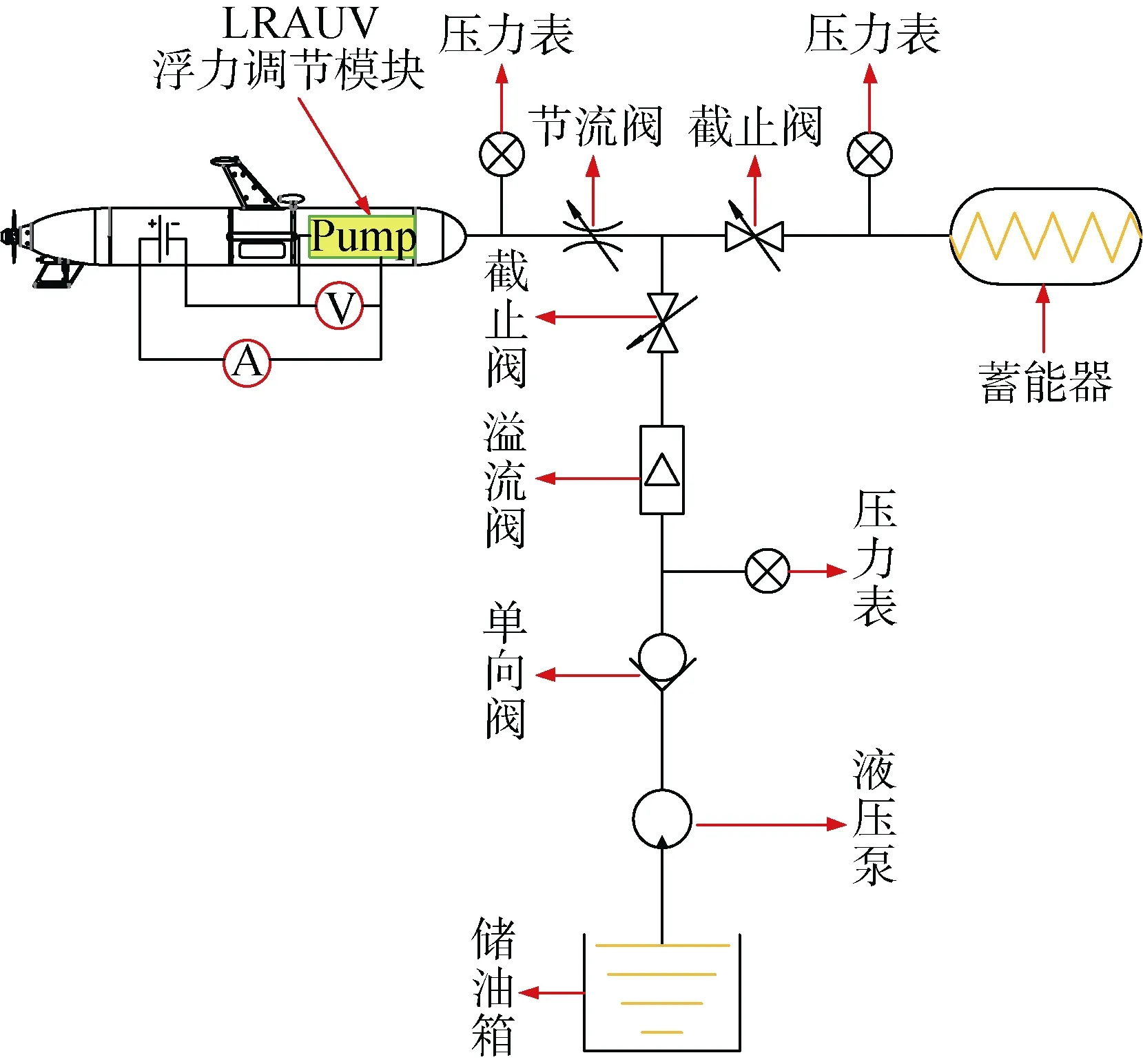
图7 浮力泵系统测试原理Fig.7 Test principle of buoyancy pump system
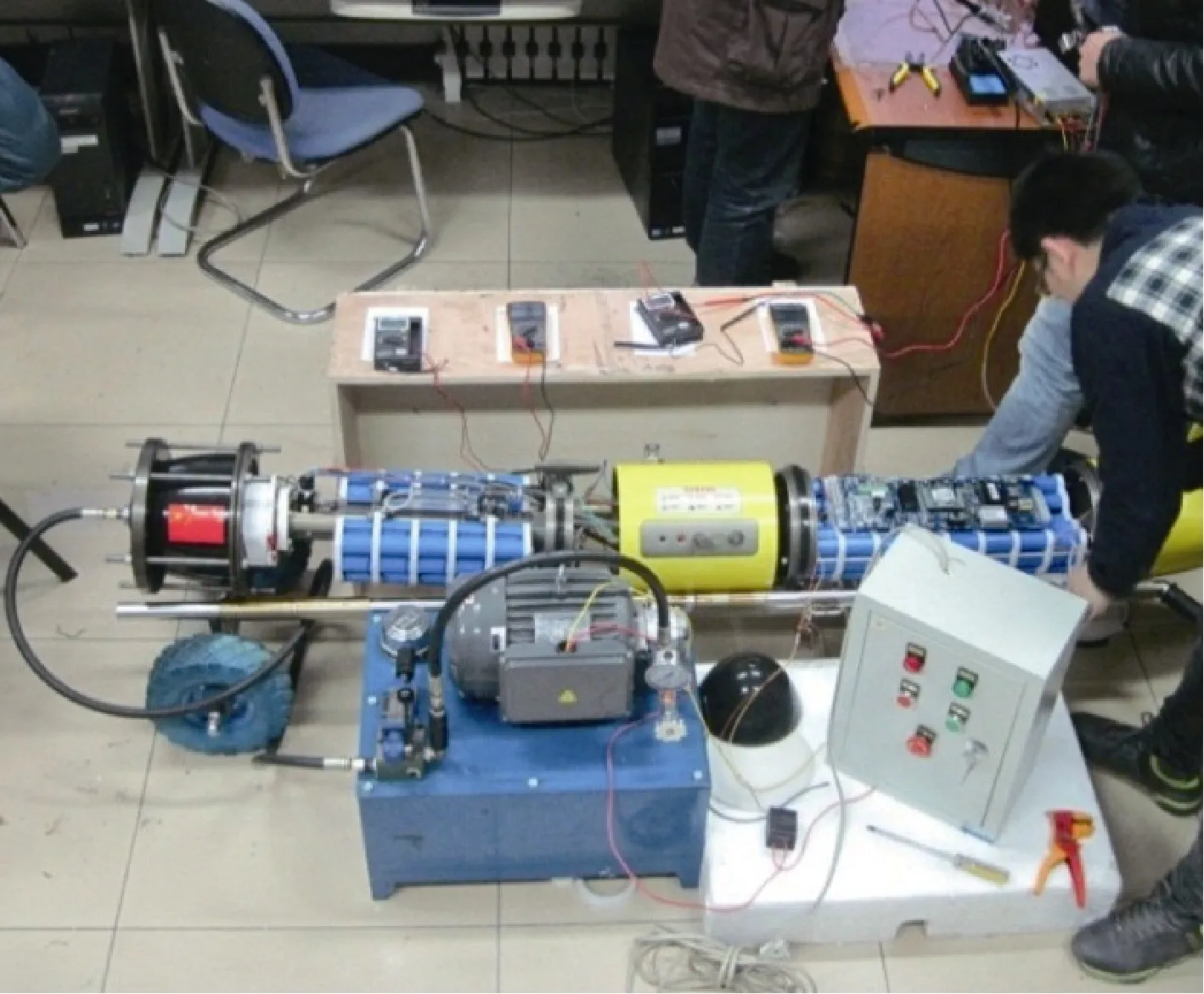
图8 浮力泵系统实测现场Fig.8 Test site of buoyancy pump system
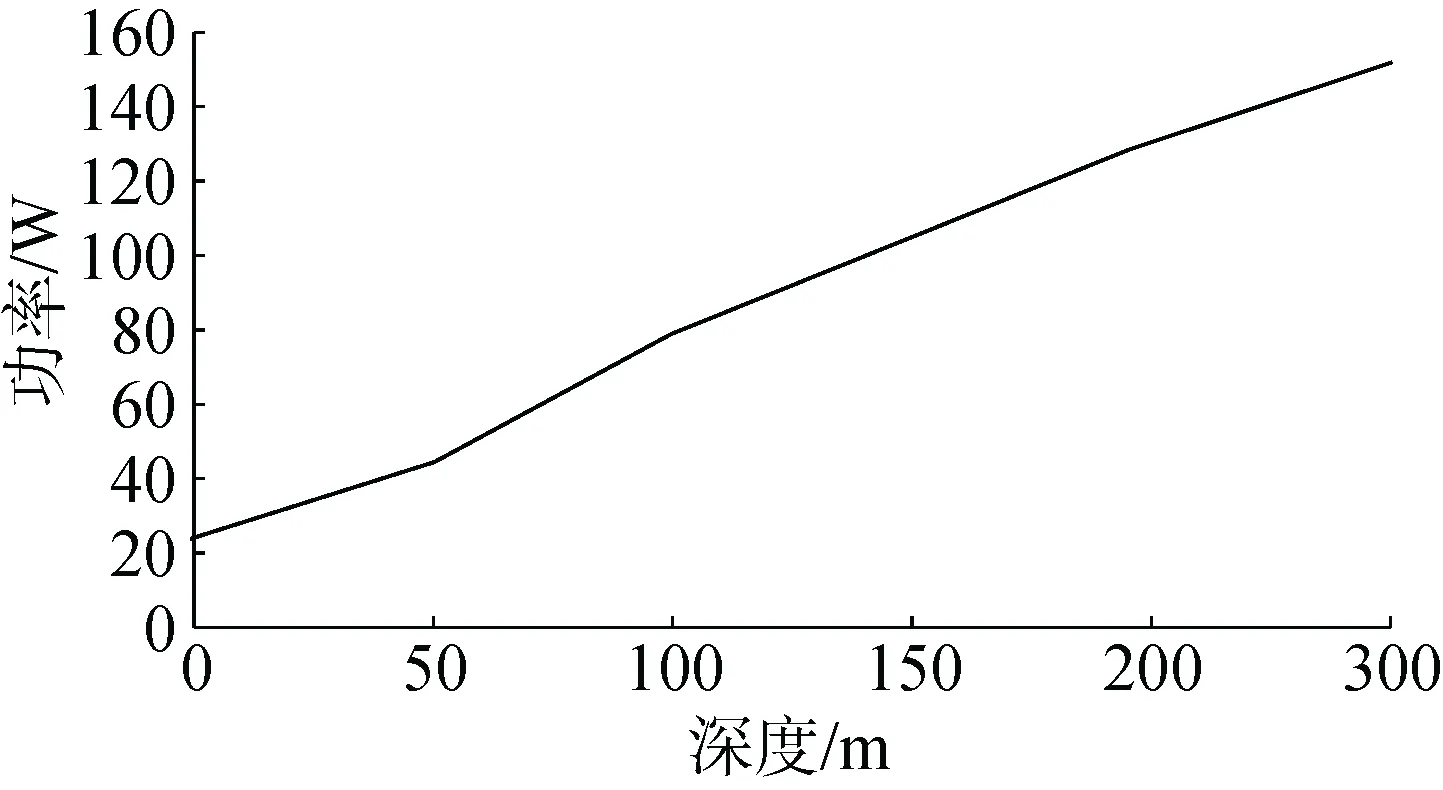
图9 实测功率与压力深度测试曲线Fig.9 Test curve of power versus pressure depth
小型LRAUV做下潜和上浮运动浮力调节模块单次工作31 s,即排油动作和吸油动作各31 s,姿态调节模块单次工作26 s,即俯仰电池包前向及后向各运动26 s,其余时间为自由浮潜运动,浮力泵调节模块和姿态调节模块处于关闭状态。经实测,小型 LRAUV下潜和上浮时的纵向平均速度约为 0.2 m/s,完成 200 m深度的下潜或上浮运动耗时约 1000s,即td=tu=1000s 。此外,小型LRAUV下潜和上浮时通过姿态调节可获得大约20°的滑翔角,200 m深度的浮潜运动可获得的前向运动约73 m,有效行程Sdu=146m。根据式(25)~式(33)可得单次下潜和上浮的循环运动能耗Wdu=102.68kJ。
2.3.2 水下推进
水下推进能耗包括螺旋桨推进器能耗Wdmp和控制、导航及其他电子设备能耗Wdmc,则水下推进时系统能耗可表示为

螺旋桨推进器能耗可表示为

控制及其他电子设备能耗可表示为

定深推进能耗可表示为
则水下推进时的有效航程可表示为

根据式(23)及式(33)~式(38)可得低速下定深推进的航程

高速下定深推进的航程

由式(24)及式(39)~式(40)的计算结果可得,小型LRAUV做水下定深航行低速推进时的有效航程

高速推进时的有效航程

分析计算结果可知,水下定深航行时,小型LRAUV低速推进可获得最大946 km的有效航程,在进行高速的机动观测时可获得约316 km的机动航程。
2.4 多次悬浮及定深的混合航行
AUV执行任务时通常是水面、水下及上浮和下潜混合进行的复杂航行[17-18],为方便分析小型LRAUV的续航力,设定5km为单位航行距离,即水面悬浮推进Ss0=5km,然后下潜水下定深Sdm0=5km航行后上浮再继续执行水面悬浮推进循环动作的小型LRAUV航行轨迹,如图10所示。

图10 小型LRAUV路径规划Fig.10 Path planning of small LRAUV
根据小型 LRAUV路径规划的特点,其单次混合航行有效航程包括水面悬浮5 km,水下定深5 km,上浮和下潜运动的前向距离146m,单次混合航行的有效航程S0=Ss0+Sdm0+Sdu=10.146km,小型 LRAUV混合航行时的有效航程可表示为

式中,N为循环次数。
小型LRAUV进行混合航行时的系统能耗可表示为

式中:Ws0为水面悬浮5 km单位能耗;Wdm0为水下定深5 km单位能耗。
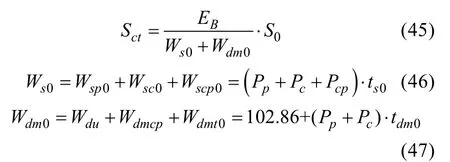
式中:Wsp0为水面悬浮 5 km螺旋桨推进器单位能耗;Wsc0为水面悬浮 5 km控制导航及其他电子设备单位能耗;Wscp0为水面悬浮5 km通信及定位系统单位能耗;Wdmt0为水下定深螺旋桨推进 5 km单位能耗;ts0为水面悬浮 5 km耗时;tdm0为水下定深5 km耗时。


式中:tsL0为水面悬浮低速航行5km耗时;tsH0为水面悬浮高速航行5km耗时。
由式(41)~式(46)可得

式中:WsL0为水面悬浮低速航行 5 km的单位能耗;WsH0为水面悬浮高速航行5 km的单位能耗;WdmL0为水下定深低速航行 5 km单位能耗;WdmH0水下定深高速航行5 km单位能耗。
则小型LRAUV做混合航行运动时在高低不同航速下的有效航程分别为

式中:SctL为低速航行的有效航程;SctH为高速航行的有效航程。
混合航行作为小型LRAUV航行过程最常应用的一种航行模式,其最大航程可达560 km,高速下的机动观测可实现最大263 km的有效航程,较之传统 AUV的数十至上百公里的有效航程,已有很大提升。
2.5 多种推进模式比较
由前文计算结果可知,不同航行模式下的续航力对比如图11所示。分析续航力结果,3种不同航行模式下,水下定深航行续航里程最大,混合航行续航里程最小。3种航行模式在低速推进时最大航程差值较大,高速推进时最大航程差值较小,且不同航行模式下最大的续航里程都是在低速推进时实现的。此外,同一航行模式下,高速推进和低速推进相比定深航行的差值最大,混合航行的差值最小。由此可知,速度对小型LRAUV的续航力影响最大,若要实现最大的续航里程,必须以低速推进,同时降低通信频率,减少下潜及上浮的次数。若要实现高速的机动观测,则可根据需求任选 3种航行模式之一,对续航里程影响不大。此外,若换装一次锂电池组,由一次锂电池组与二次锂电池组的倍数关系可知,小型LRAUV低速下可实现的最大航程为2 554.2 km,高速下可实现的最大航程为853 km,混合航行可实现最大续航1 512 km,机动观测710 km。
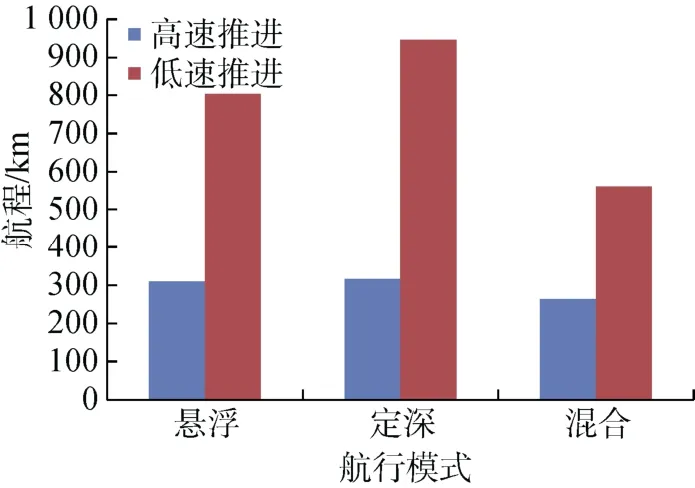
图11 不同航行模式最大续航力比较Fig.11 Comparison of maximum endurance for different running modes
3 结束语
针对小型LRAUV不同的航行模式分析了其在不同航速下的最大续航里程,由分析计算结果可知,小型 LRAUV的续航里程与航行速度、通信频率及下潜和上浮的频率有关,综合分析小型LRAUV的3种不同航行模式。由分析结果知:60 kg级小型 LRAUV常规动力条件下可实现最大946 km续航,一次锂电池组能源可实现最大 2 554.2 km续航,低速推进是长续航力的先决保证。
文章从能耗分析的角度研究不同航行模式下小型 LRAUV的续航里程,后续可对其进行动力学建模,从动力学分析和运动仿真的角度研究小型LRAUV的续航力。
猜你喜欢
小哥白尼(军事科学)(2022年7期)2022-09-20
舰船科学技术(2020年6期)2020-11-27
航空发动机(2020年3期)2020-07-24
海峡姐妹(2019年5期)2019-06-18
中学科技(2017年10期)2017-11-04
太空探索(2016年12期)2016-07-18
航海(2016年2期)2016-05-19
试题与研究·中考物理(2015年4期)2016-04-07
少儿科学周刊·少年版(2015年2期)2015-07-07
少儿科学周刊·儿童版(2015年2期)2015-07-07
