
基于声对接耦合的水下高速航行器全弹道仿真测试方法
2019-07-16 06:16蒋继军康文钰徐园园王明洲
水下无人系统学报 2019年3期
张 俊,蒋继军,康文钰,徐园园,王明洲
(中国船舶重工集团公司 第705研究所,陕西 西安,710077)
0 引言
一般水下高速航行器根据需要可用于主动搜寻并拦截来袭目标,其技术要求高,研制难度大,因此验证其性能指标的湖海实航试验组织难度高、经费开销大且时间周期长。同时,航行器在使用环境中,面临着同一区域器材多、声兼容问题突出和浅水强混响等复杂问题,仅仅利用湖海试验难以实现某些边界条件下的性能验证。因此,为给水下高速航行器中目标检测、拦截弹道设计、作战使用等关键技术的解决和验证提供有力的技术手段,验证其作战效能,建立相应的陆上半实物仿真环境,具有迫切的需求和重要的价值[1]。
水下高速航行器仿真通常分为数学仿真和半实物仿真。曹萌等[2]提出了一种水下高速航行器全弹道数学仿真系统,可较好地用于研究验证水下高速航行器动作流程设计的合理性,优化性能参数设计。杨云川等[3-4]设计了一种基于消声水罐声学物理场的水下航行器制导半实物仿真系统。董晓恒等[5]设计了一种基于电注入方式的半实物仿真测试系统,实现了水下高速航行器自导系统电子组件的半实物仿真。直接水声物理场耦合方式的半实仿真系统是能够实现水下高速航行器真实使用环境的最直接仿真和测试,缺点是系统复杂、建设投资大和建设周期长。电子注入半实物仿真方式的硬件系统相对简单,成本相对低,主要缺点是航行器自导声学基阵不引入仿真系统,无法对航行器实现全系统测试考核。
基于声对接耦合注入的半实物仿真测试系统采用对接基阵与水下高速航行器声学装置换能器一一对接,通过声信号耦合的方式,完成航行器寻的信号回波的模拟,并结合航行器本身运动状态的解算和模拟,实现水下全弹道仿真与测试。与其他方式相比,其特点是脱离消声水罐或者水池等大型试验设施的限制,将航行器声学基阵纳入仿真测试中,完整地对水下高速航行器进行总体考核,可形成小型化、可移动的仿真测试系统。在测试效果、研制成本、实施难度及水下高速航行器研制、试验和作战训练需求等方面具有优势。基于此,文中针对水下高速航行器陆上仿真测试,建立了基于声对接阵的全弹道仿真测试系统,为水下高速航行器研制、效能评估和作战使用提供支撑。
1 基于声对接耦合的半实物仿真测试系统
1.1 功能组成
基于声对接耦合的航行器半实物仿真测试系统主要实现功能如下。1)运行支持功能:包括产品供电、射前流程、运行参数设定等。2)物理效应模拟功能:水下高速航行器姿态和深度信息模拟,以及根据设定的环境参数、目标参数、目标态势及自导发射信息的目标回波信号模拟。3)全弹道试验支持功能:包括水下高速航行器拦截态势设定、典型环境参数设定、试验流程控制、试验过程数据和状态显示监控、数据记录分析等。
该系统包含显控计算机、控制仿真机、目标及海洋环境实时生成装置、声对接装置、程控衰减器和产品供电电源等部分,如图1所示。

图1 全弹道仿真测试系统组成Fig.1 Constitution of whole trajectory simulation test system
图中:显控计算机为系统的主控设备,完成试验流/态势、参数设定和试验状态显示等功能;控制仿真机负责水下高速航行器运动学与动力学仿真,模拟航行姿态和深度;目标及海洋环境实时生成装置对目标主被动回波和海洋环境噪声进行模拟;程控衰减器实现目标回波强度动态范围调整;声对接装置将模拟的回波信号和海洋环境噪声信号按照水下高速航行器自导系统声学基阵的分布规律,通过模拟海水声阻抗特性的声传播介质,一一耦合作用于自导系统声学装置接收换能器;产品供电电源按照水下高速航行器供电时序实现电源供给。
1.2 工作流程
仿真测试开始时,先进行仿真测试系统设定。显控计算机在各设备自检正常后,向控制仿真机发送初始态势参数、航行器参数、运动参数等与相对运动和对抗态势相关的参数;向目标及海洋环境实时生成装置发送水文参数、目标声特性参数、噪声参数等与目标检测相关的目标和海洋环境参数。
仿真系统参数设定完成后进入水下高速航行器射前参数设定和流程阶段,主要完成水下高速航行器状态检查、弹道参数设定、射前姿态初始化等。
待水下高速航行器反馈射前状态完成后,显控计算机发送“发射”指令,仿真运行开始。控制仿真机开始按照设定态势和参数解算水下高速航行器、来袭目标、本舰的运动参数,模拟输出水下高速航行器姿态信息和深度信息。目标及海洋环境实时生成装置根据航行器与目标相对位置、水声环境参数、寻的信号参数生成目标回波和环境噪声信号,经程控衰减器强度控制和声对接装置电声转换后声耦合到水下高速航行器声学基阵。水下高速航行器根据仿真系统模拟的目标回波、姿态及深度对来袭目标进行检测、跟踪和拦截,完成一个全弹道机动过程。
2 声对接耦合基阵
声对接装置是水下高速航行器全弹道仿真测试系统关键设备,主要功能是将仿真的阵元域电信号转换为声信号,以声耦合方式为水下高速航行器自导系统声学换能器提供一对一的物理激励。由对接基阵、对接机构和声匹配材料(透声橡胶)等组成。
2.1 基阵设计
2.1.1 对接换能器
根据目标距离变化,声对接换能器输出声信号,在能量上需满足目标回波信号大动态范围变化要求,同时尽可能减少由于声耦合过程导致的通道间交叉耦合,提高通道独立性。
在主动工作模式下,根据声呐方程可以估算目标回声级[6]

式中:SL为水下高速航行器声学基阵发射声源级;TS为目标强度;TL为声波在海水中的传播损失。
针对水下高速航行器使用要求计算可知,对接阵换能器输出的目标回波信号动态范围需要达到100 dB。
通常将声对接换能器谐振频率设计在远离水下航行器工作频段的高频段上,这是因为:1)高频换能器孔径较小,有利于机械对准[7];2)高频换能器在水下航行器常用的工作频段内自身发送电压响应曲线虽然不平坦,但随频率近似于线性增加,有利于在软件上实现对发射信号的幅度补偿,以达到较平坦的信号能量输出;3)高频换能器在非谐振点频段电压响应较低,但在声对接的压紧状态下满足目标回波能力输出的要求,恰好适合在该条件下使用。
声对接换能器采用复合棒纵向振动换能器,基本组成包含前盖板、压电陶瓷堆,预应力螺杆和后质量块。其特点是技术成熟,结构简单,易于安装固定、耐挤压、声发送能力良好[8]。采用 2片PTZ-4压电陶瓷圆片作为振动源,前盖板材质选用硬铝,后盖板为黄铜,预应力螺杆为钢材料。
采用有限元方法对换能器建立谐响应分析模型,得到换能器在水中的导纳曲线(见图 2,其中,G为电导,B为电纳)和发送电压响应曲线(如图3所示)。该换能器谐振工作点在归一化频率为1处,在水中兵器常用频段范围内换能器发送电压响应级为80~100 dB,基本随频率线性上升。在紧密对接状态下,通过调整换能器输入电压可满足不同距离下目标回波强度声信号输出要求。
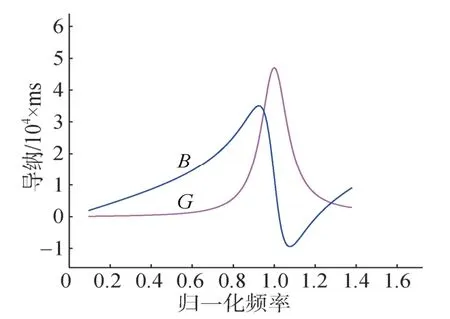
图2 声对接阵换能器导纳曲线Fig.2 Admittance curves of acoustic butt array transducer
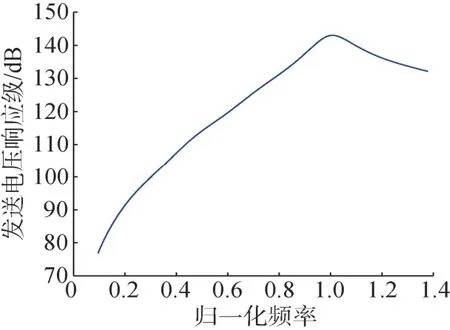
图3 声对接阵换能器发送电压响应曲线Fig.3 Transmitting voltage response curve of acoustic butt array transducer
2.1.2 对接基阵及对接方法
声对接基阵阵型与水下高速航行器声学装置阵型完全一致,对接换能器与接收换能器中心严格对准,一一对接形成声通道,如图 4所示。对接换能器通过承压板安装固定,换能器间采用吸声材料填充,以降低换能器间振动耦合,基阵表面采用声匹配材料(透声橡胶)硫化覆盖。
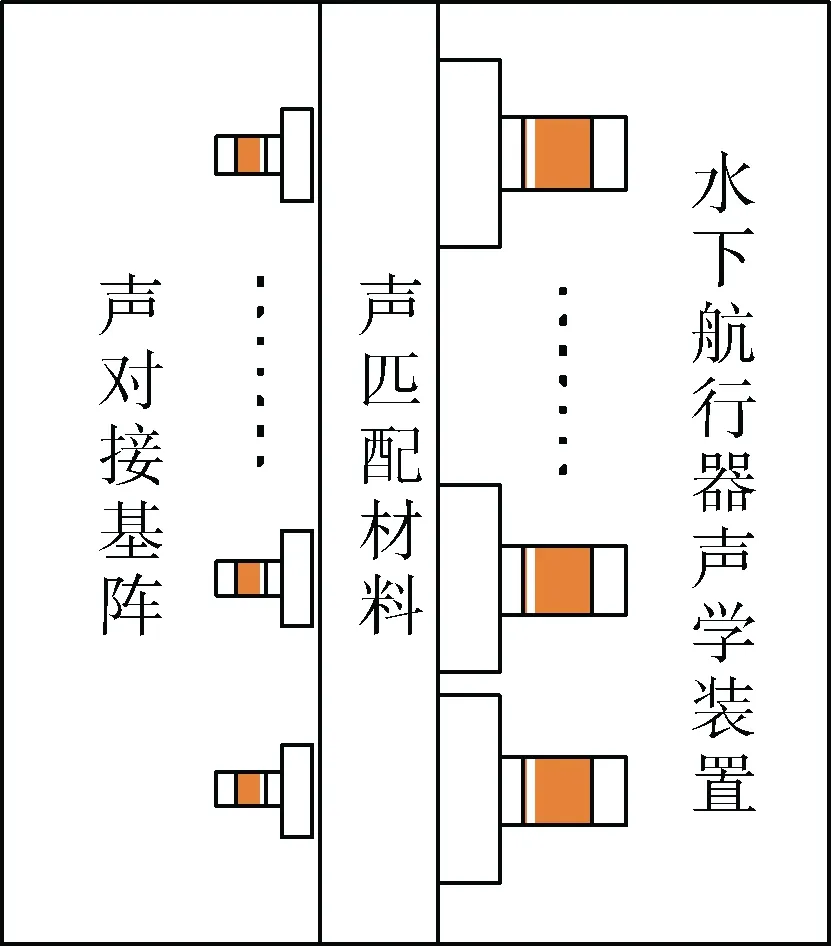
图4 声对接阵及对接状态示意图Fig.4 Schematic diagram of acoustic butt array and butt state
结构上,为保证一定的对准精度,将对接基阵和水下高速航行器自导头段安装在一块水平底板上,二者水平中心对准。对接基阵在保证水平和垂直度前提下固定安装后不可调整,自导头段固定在移动导轨上通过转动轴承可前后运动。使用时通过转动轴承将自导头段前移使接收阵面与对接基阵阵面接触,并施加一定的预紧力。预紧力的大小采用力矩扳手保证,以保证声信号的正常耦合,并一定程度上提高对接基阵的声辐射效果。
1)声匹配材料选择
声对接换能器与水下高速航行器声学装置基阵对接,为避免声学装置硫化橡胶层损坏并取得良好的声耦合效果,需在基阵间增加一层声匹配材料。对接基阵辐射声信号经匹配材料和声学装置硫化橡胶的接触界面后到达接收阵元端面。设声匹配材料声阻抗为ρ1c1,硫化橡胶声阻抗为ρ2c2,推导得声波垂直入射时分界面上反射波声压与入射波声压之比rp,透射波声压与入射波声压之比tp[9],且

水下高速航行器头部硫化橡胶层为聚氨酯橡胶,其声阻抗与海水接近。由公式可知,宜选用与水下高速航行器头部硫化橡胶层材料声特性相同的材料,二者声阻抗相等,理论上声波将无损失地通过接触界面耦合到接收阵元。同时,声匹配材料适宜采用偏软透声橡胶且接触面处涂抹声耦合剂,使得在对接压紧状态下匹配材料与水下高速航行器硫化橡胶层紧密贴合,减少分界面处声波的反射,最大限度地减少声能量的损失。
2)通道隔离度控制
声对接阵输出的目标及环境噪声信号通过声匹配材料传输到水下高速航行器声学基阵接收面,由于声扩散机理通道间不可避免产生交叉耦合,影响通道间独立性。通道间的交叉耦合可以通过通道隔离度进行评估,这里定义当一个通道进行声传输而其余通道不工作时,该通道水下高速航行器声学基阵接收换能器与相邻通道换能器接收声压大小之差为通道隔离度。
对于圆柱形对接阵换能器,如果其辐射面半径为a,则其在声对接匹配材料中的声波幅值达到平稳且规律变化的距离zg可简单评估为[9]

式中,λ为声波波长。
如果换能器辐射面半径为 5 mm,声波信号频率为25 kHz时,zg约为0.42 mm。可见对于单个对接声通道来说,只要对接阵换能器辐射面尺寸足够小,其传播到待测水下高速航行器声学基阵接收换能器处的声压已经达到了稳定变化状态。各个接收换能器处的声信号声压可通过圆形活塞中心法线上辐射声压计算公式进行简单评估,从而计算对接阵通道间隔离度。圆形活塞辐射中心法线上某个接收点声压[9]

式中:ρ0,c0和ua分别为声匹配材料密度、声速和辐射面振动法向振速;z为中心法线上接收点与辐射面中心距离;k为波数;R为辐射面边缘到接收点距离,且

实际上,声对接匹配层材料前后分别为声对接阵阵面和航行器声学基阵阵面,一般为硬金属,阻抗远大于声匹配材料,声波将在这 2个边界处发生同幅度同相位反射。声匹配材料外部是空气,声阻抗远小于声匹配层材料,声波也将发生反射。可见,声对接阵与航行器声学基阵间的声传播环境是一个封闭的复杂声场。
为更精确地实现声对接阵耦合隔离度的分析计算,文中采用边界元数值方法对声对接阵辐射声场进行计算。基于实际产品结构和尺寸,采用边界元法建立了声对接阵耦合声场模型[10]。分别建立声匹配层厚度5 mm,10 mm,15 mm,20 mm和25 mm时的声场计算边界元模型,对常规频段的 15个频点进行计算,得到相邻通道接收换能器间声压级之差(隔离度)如图5所示。
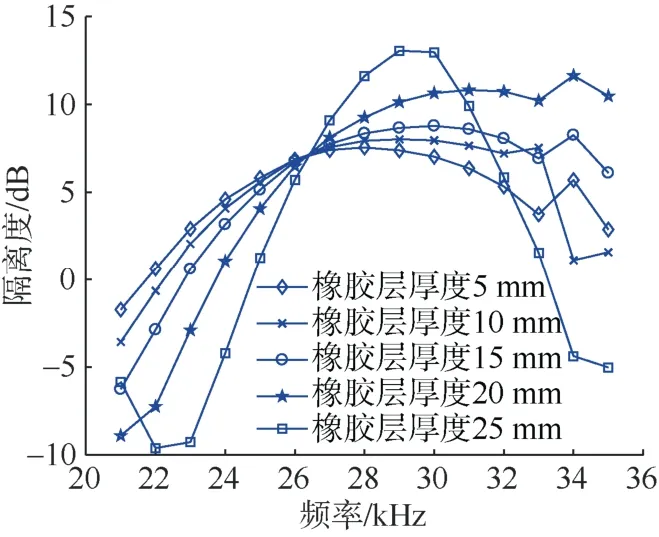
图5 换能器1与换能器2接收面声压级之差Fig.5 Difference of received acoustic pressure level between transducer 1 and transducer 2
由图 5可知,隔离度随着频率逐步增大,并在30 kHz左右达最大,且与橡胶层厚度呈正比关系。橡胶层为5 mm时,隔离度最大值为7.57 dB,在5种橡胶层厚度中最小;橡胶层厚度25 mm时,隔离度最大为13.06 dB,效果最好。频率超过30 kHz后,不同橡胶层厚度时隔离度均开始下降,甚至变为负值。由此可见,通道间的声耦合与声波频率、传播介质厚度有密切的关系。在质厚度一定的频率范围内可以实现隔离度最大化。根据计算和测试结果,传播介质厚度为传输信号的0.5个波长较合适。
2.2 基阵测试
声对接基阵在使用前需要进行校准和测试,考察生成回波信号参数是否正确,及各通道间幅度和相位的一致性。根据测试情况,对各通道幅度和相位进行补偿,从而实现目标回波信号的精确模拟。
陆上环境中,对接基阵与测试声学基阵对接,施加一定大小预紧力。目标及海洋环境实时生成装置生成频率为f0的主动目标回波信号,同时叠加混响、噪声等背景干扰信号。生成的信号经程控衰减器调整各通道幅度后,驱动对接阵转换为声信号耦合到测试声学基阵。图6为某一通道测试声学基阵换能器输出回波信号时域波形,图 7为其频谱图。基于对接基阵输出信号经过相关处理后估计目标方位、距离和速度[11],并与仿真设定目标参数对比,结果如表1所示。
从测试结果可见,对接基阵能正确生成目标回波信号,信号强度和频率精度符合水下高速航行器对目标的检测需求。模拟的目标参数与设定参数基本一致,能够正确反映目标信息。从而验证了基于声对接耦合方式的水下高速航行器仿真测试是有效和可行的。
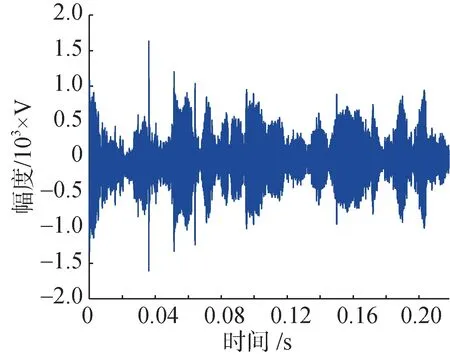
图6 回波信号时域波形Fig.6 Waveform of echo signal in time domain
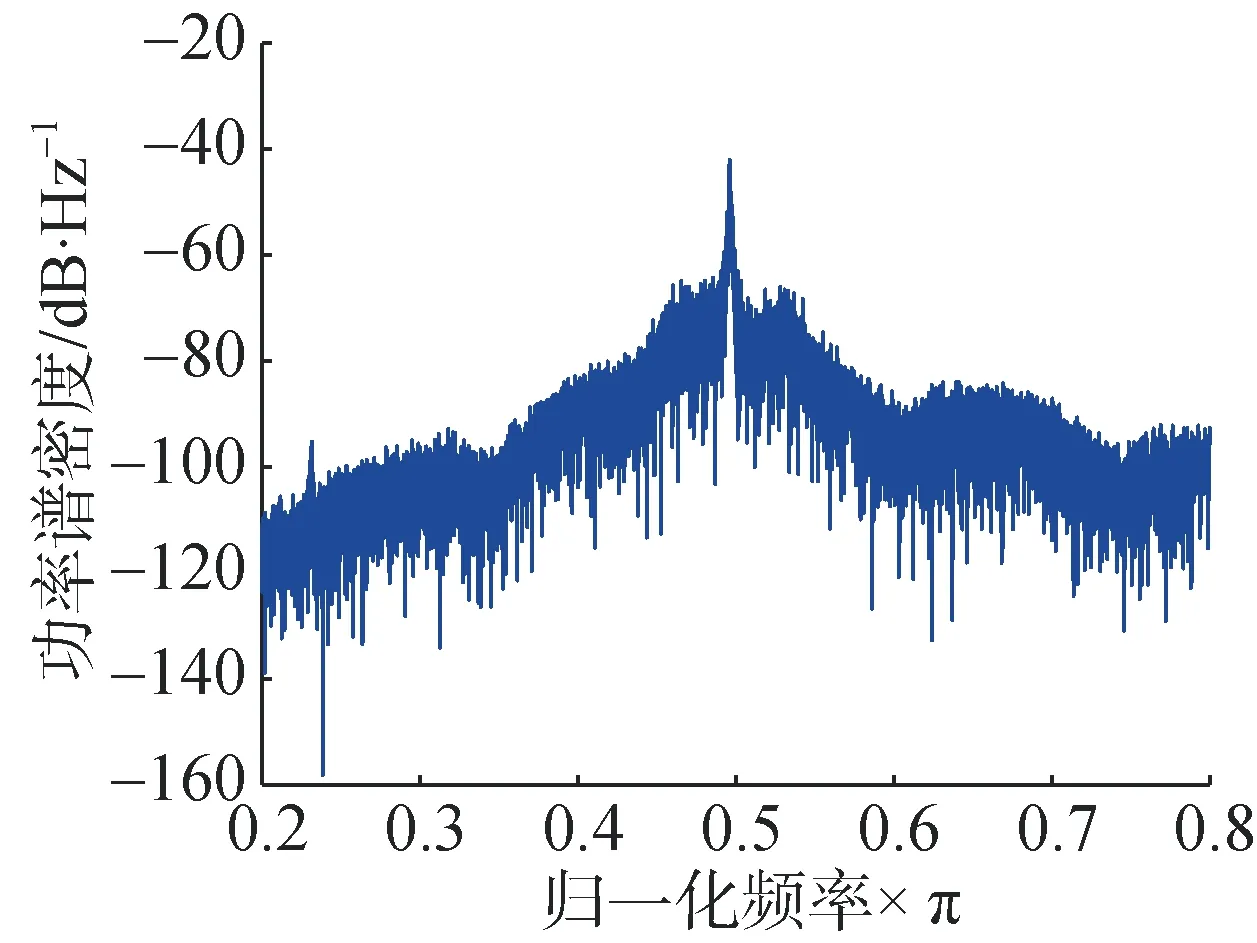
图7 回波信号频谱Fig.7 Frequency spectrum of echo signal
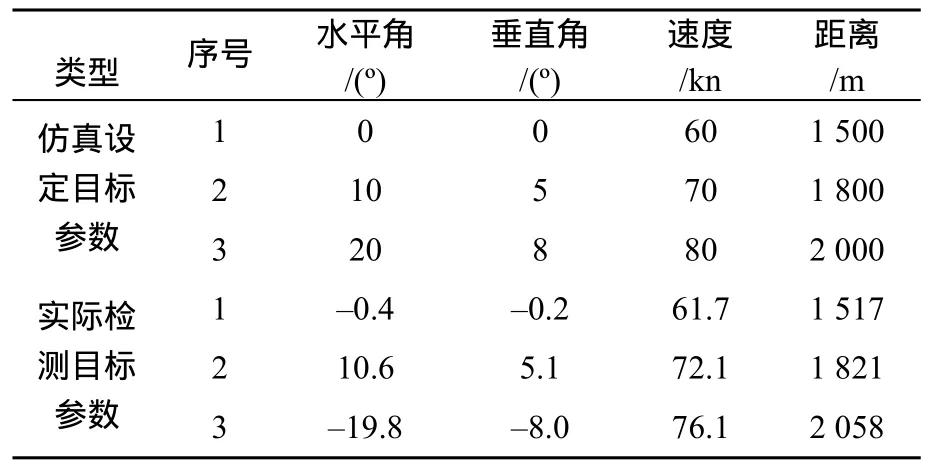
表1 设定目标参数与实际检测参数对比Table 1 Comparison between set target parameters and actual detection parameters
3 仿真验证
为验证陆上全弹道仿真测试系统用于水下高速航行器全弹道测试的可行性和有效性,选取 2种典型的拦截高速小目标工况进行仿真测试。具体弹道图见图8和图9。
通过验证可知,2种工况下,被测航行器均能及时发现来袭目标,并进行有效的跟踪拦截。经过对不同条件、多条次的仿真测试结果进行统计分析,并与实航试验结果对比,从水下高速航行器自导发现来袭目标时刻、航向角变化情况、脱靶量等关键数据看,仿真结果和实航试验结果基本一致,说明了陆上仿真的有效性。
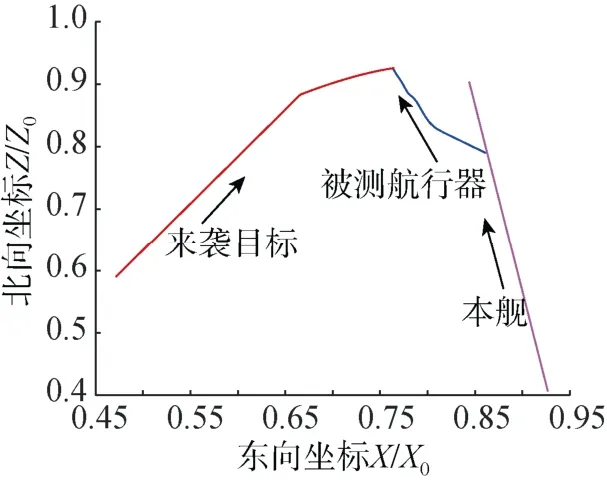
图8 拦截高速目标1全弹道航迹图Fig.8 Whole trajectory track of intercepting highspeed target 1
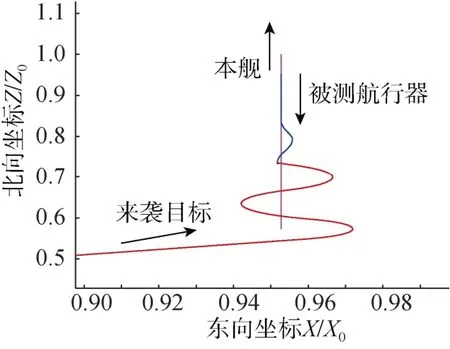
图9 拦截高速目标2全弹道航迹图Fig.9 Whole trajectory track of intercepting high-speed target 2
4 结束语
文中介绍的水下高速航行器陆上全弹道仿真测试系统采用声耦合注入方式,在实验室条件下即可完成水下高速航行器仿真测试工作。完成的主要研究内容为:1)实现了水下高速航行器水下目标检测、导引及机动仿真,在接近水下高速航行器实航状态和系统组成条件下实现了全系统仿真测试;2)实现了包含射前流程、入水弹道及导引弹道在内的水下高速航行器全弹道仿真测试;3)形成了基于声耦合方式的半实物仿真系统设计和使用方法。
目前该系统已经在水下高速航行器的研制和实航试验中使用,仿真数据与实航数据相符,系统功能和性能得到了实践验证,具有良好的科研效果。通过结构优化和功能提升,该系统可广泛用于各型水下航行器的方案论证、性能测试、定型评价、作战训练等方面。结合实际使用情况,下一步工作的重点将是增加末弹道仿真模块和功能、声耦合基阵测试和校准方法研究、系统结构小型化及便携式设计等方面。
猜你喜欢
小哥白尼(趣味科学)(2022年3期)2022-06-09
无损检测(2022年1期)2022-03-16
数字海洋与水下攻防(2020年5期)2021-01-04
家庭影院技术(2020年11期)2020-12-28
家庭影院技术(2020年5期)2020-08-24
家庭影院技术(2020年6期)2020-07-27
水下无人系统学报(2020年1期)2020-03-06
空气动力学学报(2019年5期)2019-12-31
电子制作(2019年7期)2019-04-25
电子制作(2019年23期)2019-02-23
