中小型球面反射镜柔性支撑优化设计
2019-07-15 09:41王文攀吕天宇刘祥意范磊
长春理工大学学报(自然科学版) 2019年3期
王文攀,吕天宇,刘祥意,范磊
(中国科学院长春光学精密机械与物理研究所,长春 130033)
随着光学事业的发展和人类探索宇宙不断深入,地基望远镜的口径也越来越大。国外主镜口径为4m~8m级的地基望远镜已经成熟,更大口径的望远镜正趋于成熟,目前世界上最大的在建地基望远镜包括由欧南台研制的42m ELT[1]和由美国加州大学联合加拿大、中国、日本、韩国和印度共同研制的30m TMT[2]。国内自主研发的4m望远镜正处于研制阶段,距离工程化应用还有一段距离,2m望远镜也刚刚完成应用,更多的则是1m及以下的中小口径光学探测[3]。
光学探测的目的主要是了解目标的运动轨迹、运动姿态和光学特性等,目前地基光学望远镜的终端主要包含捕获跟踪、红外成像、光谱成像、偏振成像和微光成像等。对于望远镜口径的增大,光学终端中无论是反射镜还是透镜的口径均会相应的增大。球面反射镜作为成像系统中的重要部分,其支撑设计尤为重要[4]。对于小型反射镜,一般采用刚性支撑;对于中大型反射镜一般采用半运动学或运动学柔性支撑;对于中小型反射镜选择方式比较多,根据光学要求可以采用刚性支撑、边缘柔性环支撑[5]和柔性半运动学支撑。范磊等[3]采用底部6点Whiffletree结构和中心芯轴方式实现了φ710mm主镜的运动学支撑,刘昌华等[6]采用背部柔性环粘接,介绍了小孔径平面反射镜的支撑方式和粘接方法;柳鸣等[7]介绍柔性支撑衬套和椭圆背部安装板实现了空间轻小型反射镜的支撑。国内文献对于中大型反射镜支撑和小型反射镜支撑介绍比较多,但是对于中小型反射镜支撑则相对较少。本文采用运动学支撑,通过有限元分析,对口径φ316mm的双曲面反射镜进行了详细的分析设计,并搭建光路,对使用工况下面型进行检测。
1 支撑方式选择
口径为100mm左右的小型反射镜采用刚性压圈结构即可以满足要求,但是当口径大于250mm时,刚性支撑很难满足要求,此时必须采用柔性支撑,主要方式为边缘柔性环支撑和柔性半运动学支撑。如图1所示为边缘柔性环支撑原理图,图中柔性环内圈与透镜边缘接触,通过环氧树脂胶粘接固定,为了消除胶收缩应力,柔性环与透镜通常为间隙配合,该方法的难点在于柔性环的设计和装调过程中胶层厚度选择。
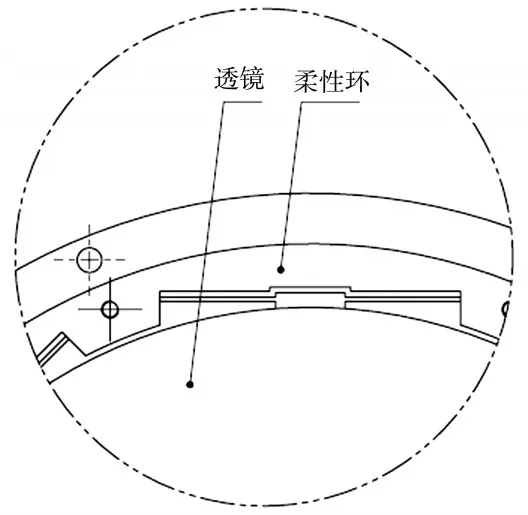
图1 边缘柔性支撑原理图
柔性半运动学支撑主要采用轴向3点和径向心轴的方式,当光轴竖直时,整个镜面通过轴向3点支撑,当光轴水平时,则通过心轴支撑。为了减少热变形和装调应力对镜面面型影响,无论是底支撑还是中心芯轴必须设置柔性环节。但是柔性支撑只约束了反射镜的5个自由度,为了完全约束反射镜,在反射镜背部粘接切向柔杆以限制其自由度RZ。图2为柔性半运动学支撑原理图,图中N1、N2和N3为轴向支撑点位置,P1、P2和P3为径向支撑示意点,L1、L2和L3为切线翻转细杆。
两种方式都能满足中小型反射镜支撑要求,通过对比可知,边缘柔性支撑较多的适用于透镜支撑,对于背部可用的反射镜而言,一般选择柔性半运动学支撑。

图2 柔性半运动学支撑原理图
2 φ316mm双曲面反射镜支撑设计
2.1 反射镜支撑方案及优化设计
该反射镜为某地基望远镜光学终端中的折转镜,镜体材料为微晶,口径为φ316mm,重量约为8.8kg,双曲面反射镜结构如图3所示。由于反射镜光轴平行于望远镜俯仰轴,因此无论望远镜如何转动,反射镜工作状态永为光轴水平。反射镜面型要求为:加工后RMS值小于0.025λ,带支撑后RMS值小于0.030λ(λ=633nm)。

图3 双曲面反射镜结构图
反射镜采用背部3点和中心芯轴的支撑方式,中心芯轴的支撑点位于反射镜的质心处,利用ANSYS优化取整可求得背部支撑点均布于φ190mm的圆上,最终的优化结果为RMS=2.02nm,如图4为反射镜有限元模型,图5为裸镜变形云图。
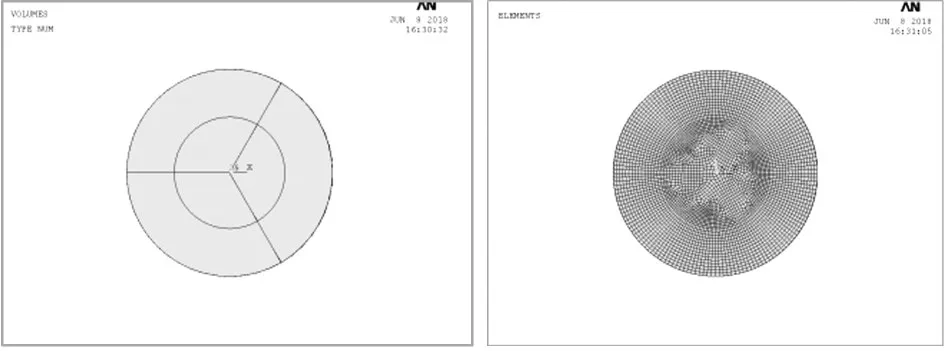
图4 反射镜有限元模型
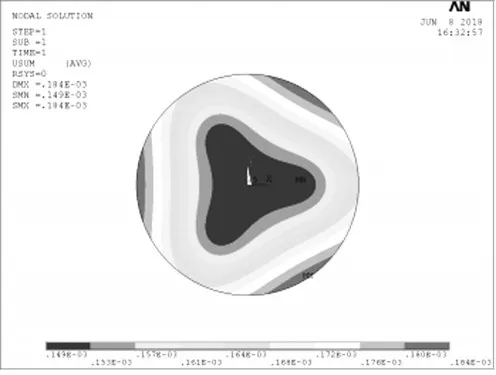
图5 优化裸镜变形云图
2.2 支撑结构设计
轴向支撑主要是提供轴向支撑力,为了与径向支撑解耦,不产生干涉应力,轴向支撑应设置柔性环节,因此采用细杆支撑方式,如图6(a)所示。中心芯轴主要提供径向支撑力,为了消除热应力和装调应力,芯轴处应设置柔性铰链,同时为了与轴向支撑解耦,芯轴与柔性铰链采用球头接触,并有微小间隙,允许其沿轴向移动和沿径向转动,如图6(b)所示,图中柔性铰链通过环氧树脂胶粘于反射镜背部中心孔。由以上分析可得,整个系统充分解耦,但是由于采用柔性结构,使反射镜能够绕中心轴旋转,为了避免欠约束,采用细杆防转结构。整个系统如图6(c)所示。

图6 支撑结构图
2.3 反射镜支撑分析
为了验证设计的合理性,针对上述结构进行有限元分析,分析系统包含反射镜、轴向支撑组件和径向支撑组件,并对结构进行简化处理,分析系统在不同工况下的变形,分析结果如表1所示,变形云图如图7所示。

表1 不同工况下双曲面面型误差
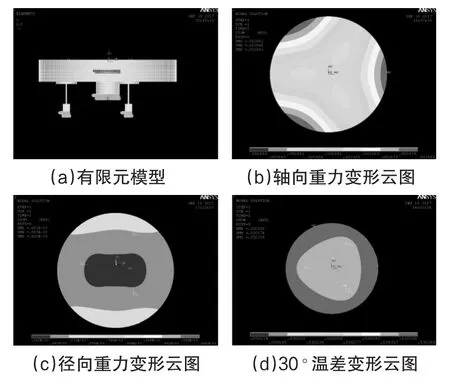
图7 不同工况下面型云图
分析结果显示在各种工况下,反射镜面型均能满足设计要求,验证了设计和原理的可行性和合理性。
3 反射镜面型检测
为了验证设计的正确性,搭建光轴水平光路,并用4D干涉仪检测,检测结果示意图如图8所示。

图8 检测结果示意图
根据使用状态特征,只检测光轴水平时反射镜面型,结果显示面型为0.0268λ(λ=633nm),所提供的反射镜镀膜后裸镜面型为0.0222λ(λ=633nm),两者相差0.0059λ,即为3.735nm,误差率为5.5%,满足设计要求,同时也验证了设计分析的正确性。
4 结论
本文分析了中小口径球面反射镜的支撑方式,通过对比不同类型的支撑方式,对中小型球面反射镜提出柔性半运动学原理支撑,并对口径φ316mm双曲面反射镜进行详细设计分析与检测。
结果显示支撑面型与裸镜面型相差0.0059λ,误差率为5.5%,表明该原理运用于中小型球面反射镜支撑是合理可行的,同时也说明仿真分析的正确性。但是由于条件限制,未能进行光轴竖直和热变形影响分析,需要在后期的工作中进行完善。这种方法是对现有中小型反射镜支撑方式的完善和补充,具有一定的参考价值。
猜你喜欢
制造技术与机床(2022年5期)2023-01-06
摄影之友(2020年12期)2020-12-23
上海金属(2020年5期)2020-09-26
制造技术与机床(2019年11期)2019-12-04
电脑爱好者(2018年17期)2018-11-05
江西建材(2018年2期)2018-04-14
装备制造技术(2015年7期)2015-02-20
中国重型装备(2013年3期)2013-11-18
城市建设理论研究(2012年16期)2012-10-15
兵工学报(2011年10期)2011-02-22