
基于六霍尔的无刷直流电机换相转矩脉动补偿
2019-07-11 04:59郝晓宇杨国庆唐勇斌
导航定位与授时 2019年4期
郝晓宇,杨国庆,唐勇斌
(航天科工智能机器人有限责任公司, 北京 100074 )
0 引言
无刷直流电机体积小、质量小、散热容易、可靠性高,既具有交流电动机结构简单、运行可靠、维护方便、运行寿命长等优点,还具有直流电动机调速性能好、控制方法灵活多变、效率高、起动转距大、过载能力强、无换向火花、无无线电干扰、无励磁损耗等优点[1-2]。因此广泛用于军事工业领域,它是机载、弹载及陆用等装备自动控制系统中的重要组成部分,其性能和控制精度直接影响全系统的控制品质,是现代精确打击武器的重要执行部件[3-5]。但无刷之流电机特有的转矩波动会造成电机的转速不稳定、噪声大,严重时还会影响系统的稳定性,限制了无刷直流电机在高精确度伺服系统中的应用。无刷直流电机的转矩波动是无刷直流电机最突出的问题,近年来,无刷直流电机的转矩波动及其抑制技术一直成为无刷直流电机的研究热点。分析转矩脉动的形成成了无刷直流电机控制的重要研究内容,具有十分重要的意义[6-8]。
造成无刷直流电机转矩波动有多方面原因,包括电磁转矩产生原理引起的转矩波动、电流换相引起的转矩波动、齿槽效应引起的转矩波动,还有电枢反应和电机工艺缺陷引起的转矩波动等。本文主要分析了无刷直流电机电流换相引起的转矩波动,并对其进行了补偿。
霍尔位置传感器是无刷直流电机系统的组件之一,其作用是检测无刷直流电机主转子在运动过程中对于定子绕组的相对位置。将永磁转子磁场的位置信号转换成电信号,为逻辑开关电路提供正确的换相信息,以控制它们的导通和截止,使电机电枢绕组中的电流随着转子位置的变化按次序换相,形成气隙中步进式磁场,驱动永磁转子连续不断地旋转。霍尔位置传感器在无刷直流电机中应用时需要多个组合,才能将电机的一个电周期区分为若干个开关状态。霍尔位置传感器的最小个数等于电机相数,因此三相无刷直流电机最少需要三路霍尔位置传感器。常规无刷直流电机通常采用三路霍尔进行三相六状态工作模式,本文主要针对该工作模式下的永磁无刷直流电动机换相转矩脉动进行研究,提出了一种采用六路霍尔进行三相十二状态的无刷直流电机换相方法。
1 换相转矩脉动分析
无刷直流电机采用方波电流驱动模式,如图1所示,三相星型连接的无刷直流电机绕组端A、B、C连接到由6个功率开关器件 (Q1~Q6)组成的三相桥式逆变器的3个桥臂上。霍尔位置传感器检测转子在运动过程中对于定子绕组的相对位置,将转子磁场的位置信号转换成电信号,经控制电路与斩波信号进行逻辑变换后产生脉宽调制(Pulse Width Modulation,PWM)信号(G1~G6);再经过驱动电路对其进行放大后送至逆变器,驱动功率开关器件(Q1~Q6)按一定的顺序导通,从而控制电机A、B、C三相绕组按一定的顺序导通,在电机中产生跳变的旋转磁场[9],驱动转子连续不断地旋转。
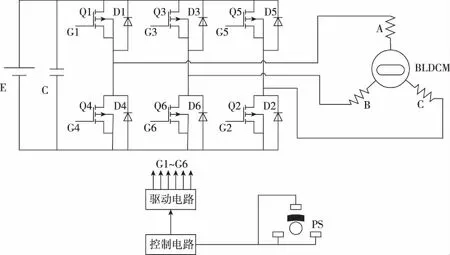
图1 无刷直流电机原理图Fig.1 The principle diagram of BLDCM
无刷电机的换相由霍尔传感器检测的转子位置决定,霍尔传感器的每个霍尔电路输出占空比是1∶1,即逻辑1和逻辑0,各占180°电角度。当霍尔元件标志面面向永磁体S极时,输出逻辑为0;当霍尔元件标志面面向永磁体N极时,其输出逻辑为1。霍尔电路输出是以它们的上跳沿和下降沿时刻来决定电机的换相点。
无刷直流电机大多采用三霍尔安装方式,如图4中HA、HB、HC位置。在一对磁极下,三路霍尔传感器HA、HB、HC安装位置均布,间隔为120°电角度,永磁体每转过60°电角度,三路霍尔传感器输出逻辑变化1次,在360°的一个电气周期时间内共变化6次,如图2所示。
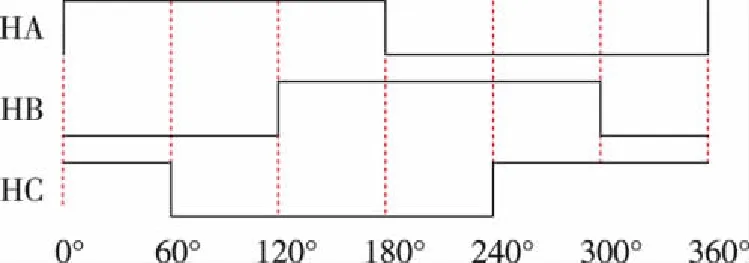
图2 三霍尔逻辑输出Fig.2 The logic output of three-way Hall position sensors
霍尔逻辑变化对应三相绕组的一种导通状态,在一个电气周期时间内,三相绕组导通状态分为6个状态,每个状态只有两相绕组导通,每一个状态持续60°电角度,每相绕组导通120°电角度。假定功率开关器件在六导通状态下按时间顺序排列为Q1Q6、Q1Q2、Q2Q3、Q3Q4、Q4Q5、Q5Q6,从第6个状态换相到第1个状态时,电机三相由CB两相导通换相为AB两相导通,C相通过D2续流。
换相过程中电机三相端电压平衡方程为
(1)
式中:ia、ib、ic为定子绕组相电流;R为每相绕组的电阻;LM为每相绕组的自感减去相邻两相绕组间的互感;Ud为直流母线电压;P为微分算子。
其中,Un为电机中性点电压
(2)
ea、eb、ec为定子绕组反电动势
(3)
电流初始条件为
ia=0,ib=-I,ic=I
(4)
解出相电流表达式为
(5)
(6)
令式(6)中ic左端为0,可得换相时间为
(7)
电磁转矩为
(8)
转矩脉动为
(9)
当Ud=4ωke时,ia与ic的变化率大小相等,ΔTe=0,没有转矩脉动,如图3(a)所示;
当Ud>4ωke时,ic还未降为0,ia已达到稳态值,ΔTe>0,电磁转矩增加,如图3(b)所示;
当Ud<4ωke时,ic还未降为0,ia已达到稳态值,ΔTe<0,电磁转矩减小,如图3(c)所示。
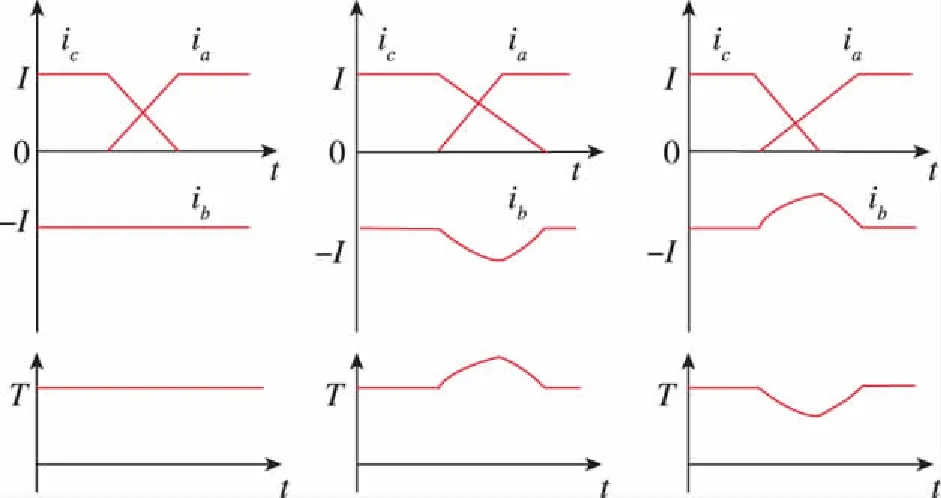
(a) (b) (c)图3 三霍尔换相模式下电流及转矩变化趋势Fig.3 The variation trend of electric current and torque with the commutation method based on three-way Hall position sensors
可见采用三霍尔六状态工作模式时,换相过程中三相电流分别处于开通、关断和非换相状态。由于绕组电感的存在[10], 关断相和开通相电流变化率不相等,使得非换相电流在换相期间发生变化,从而产生换相转矩脉动。
2 六霍尔换相模式原理分析
换相转矩脉动可造成电机抖动, 产生噪声, 增加谐波污染。无刷直流电机在高速区和低速区的换相转矩波动有所不同,研究控制方法时大都分开考虑。电流反馈法和滞环电流法较好地解决了低速时的换向转矩脉动问题, 但在高速时效果不佳[11-13]。电机工作在高速区段,换相期间,由于关断相电流下降率快于开通相上升率,造成非换相相电流凹陷,使换相期间电磁转矩减小。因此,在高速区对换相期间电流补偿的原则是,通过调节关断相的电流下降率减小非换相电流的波动。现采用一种六霍尔换相模式来减小高速时转矩脉动。
在原来三路霍尔传感器HA、HB、HC的基础上再增加三路HA′、HB′、HC′,新增加的三路霍尔传感器的位置相对原来霍尔传感器位置分别相差30°电角度,安装位置如图4所示。电机每旋转30°电角度,六路霍尔传感器输出逻辑变化1次,在360°的一个电气周期时间内共变化12次,如图5所示。每次变化对应三相绕组的一种导通状态,每个周期有12个状态,每一个状态持续30°电角度。
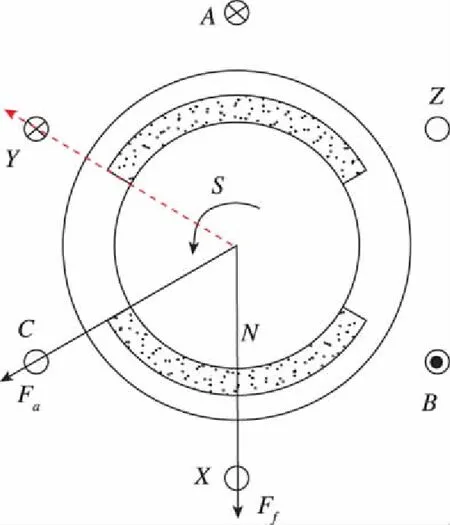
(a)
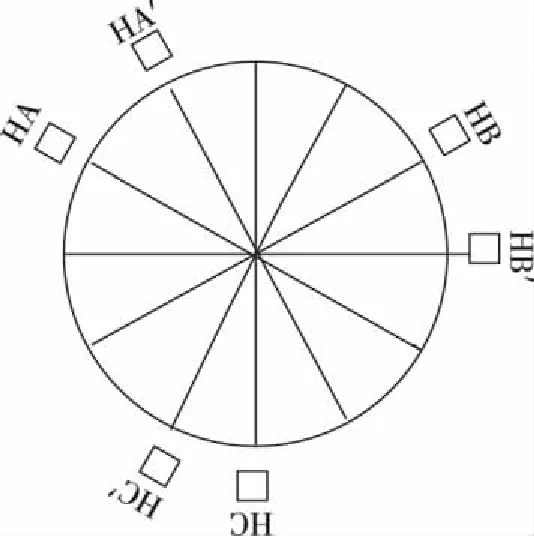
(b)图4 霍尔安装位置图Fig.4 The installation position of Hall position sensors
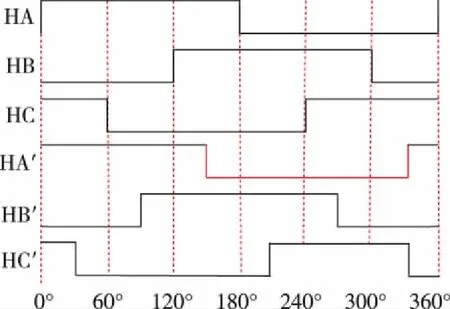
图5 六霍尔逻辑输出Fig.5 The logic output of six-way Hall position sensors
假定功率开关器件在六导通状态下按时间顺序排列为Q5Q6Q1、Q1Q6、Q1Q6Q2、Q1Q2、Q1Q2Q3、Q2Q3、Q2Q3Q4、Q3Q4、Q3Q4Q5、Q4Q5、Q4Q5Q6、Q5Q6,从第12个状态换相到第1个状态时,电机三相由CB两相导通换相为ABC三相导通,A相开始建立正电流。
(10)
A相导通过程中电机三相反电势为
(11)
可以解得相电流为
(12)
电机转过30°电角度,用时t1。功率开关器件Q1Q6导通,Q5关断,电机三相由为ABC三相导通变为AB两相导通,换相过程中电机三相端电压平衡方程为
(13)
C相电流经D2续流然后降为0的过程中,三相反电势为
(14)
可以解得三相电流为
(15)
由式(12)与式(15)三相电流表达式可以看出,当电机处于高速区域时,即当Ud<4ωke时,非换相B相电流的绝对值先上升后下降,而不是像式(6)中一直下降,有利于减小非换相电流的波动。由换相转矩与非换相电流的关系可知,换相转矩波动减小,六霍尔换相模式下电流及转矩变化趋势如图6所示。
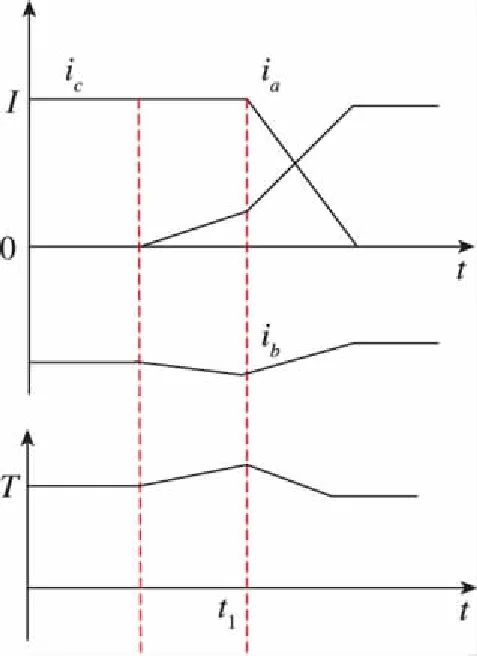
图6 六霍尔换相模式下电流及转矩变化趋势Fig.6 The variation trend of electric current and torque with the commutation method based on six-way Hall position sensors
而当电机处于低速阶段,即当Ud>4ωke时,非换相B相电流的绝对值与式(6)变化趋势相同。因此,六霍尔换相方式适用于高速阶段的无刷直流电机,可以有效减小电机的换相转矩波动。
3 仿真分析
为了验证六霍尔换相模式的可实现性,搭建无刷直流电机换相过程的数学模型,分别采用三霍尔和六霍尔两种换相模式进行仿真。
三霍尔换相模式下,电机通过三路霍尔位置传感器检测转子位置输出逻辑信号,转子每转过60°,输出逻辑变换触发电机换相。在360°的一个电气周期时间内共有6个状态,三相绕组按导通状态AB、AC、BC、BA、CA、CB循环导通。
六霍尔换相模式下,电机通过六路霍尔位置传感器检测转子位置输出逻辑信号,转子每转过30°,输出逻辑变换触发电机换相。在360°的一个电气周期时间内共有12个状态,三相绕组按导通状态ACB、AB、ABC、AC、ABC、BC、BAC、BA、BCA、CA、CAB、CB循环导通。
对无刷直流电机施加额定负载2 N·m,仿真结果为:三霍尔换相模式下,电机稳态的转矩脉动为0.6N·m,如图7所示;六霍尔换相模式下,电机稳态的转矩脉动为0.5N·m,如图8所示。仿真结果表明,采用六霍尔换相模式使该无刷直流电机转矩脉动比采三霍尔换相模式时转矩脉动减小17%。
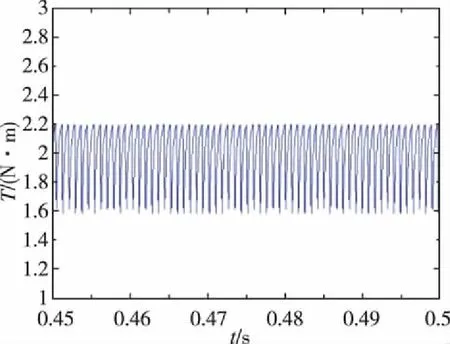
图7 三霍尔换相模式下转矩Fig.7 The torque with the commutation method based on three-way Hall position sensors
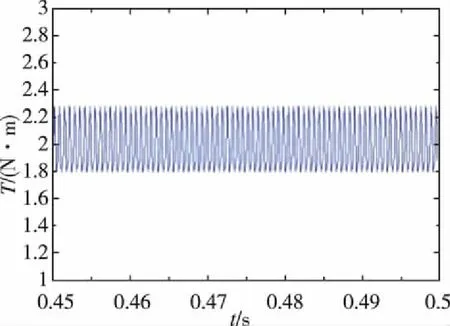
图8 六霍尔换相模式下转矩Fig.8 The torque with the commutation method based on six-way Hall position sensors
4 结论
本文对无刷直流电机的换相脉动的产生进行了详细分析和数学推导,为了补偿电机换相时非换相电流的波动,提出了一种采用六路霍尔进行三相十二状态的无刷直流电机换相方法,并对此方法进行数学原理推导证明该理论的可实现性。分析与仿真结果表明,采用六霍尔换相模式可有效抑制换向转矩脉动。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
汽车实用技术(2022年12期)2022-07-05
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
飞控与探测(2022年2期)2022-06-11
水下无人系统学报(2021年6期)2022-01-15
莆田学院学报(2021年5期)2021-11-13
科学与财富(2020年24期)2020-10-27
速读·下旬(2019年3期)2019-04-11
电子制作(2019年23期)2019-02-23
电机与控制学报(2018年9期)2018-05-14
