
Mikron HSM 400U的多轴加工仿真研究*
2019-07-04 06:55:16谈昌顺洪建明
模具制造 2019年5期
谈昌顺,洪建明
1.深圳市龙岗职业技术学校(广东深圳 518172)2.深圳职业技术学院(广东深圳 518000)
1 引言
常见的3轴数控加工是机床控制刀具在X轴、Y轴、Z轴的三坐标移动来完成零件加工。多轴数控机床中的5轴机床在原有基础上增加了两个旋转轴,使得刀具可以实现任意的空间方位和位置,减少零件的装夹次数,从而提高数控加工的精度和效率[1]。但获取多自由度的同时,5轴数控加工也让刀具在空间内的运动更加复杂,增加了刀具与机床部件以及工装夹具之间发生碰撞干涉的可能[2]。由于工作人员考虑不周、操作不当容易造成刀具、夹具和机床部件的损坏。更有甚者,引发机床的严重碰撞而造成巨大的经济损失,产生安全事故[3]。本文针对Mikron HSM 400U 5轴数控机床的结构特点,根据机床实际尺寸建立了三维模型[4],提炼出了该数控机床的两条运动链。分析了机床模型之间的装配矩阵,确定了各部件之间的位置关系、联接关系和运动关系。详细论述了在VERICUT平台中装配数控机床部件,通过数控加工仿真技术验证数控程序、加工工艺的正确性[5]。本文的研究对于如何将VERICUT与特定机床型号的多轴机床相结合,进行多轴数控仿真、验证具有实际意义。
2 多轴数控机床加工仿真
2.1 数控机床部件建模
本文中多轴加工仿真平台的构建是以Mikron HSM 400U数控机床(见图1)为原型展开的研究,该机床为瑞士GF阿奇夏米尔公司生产的高端5轴联动数控机床。
通过对Mikron HSM400U型数控机床的组成结构进行分析,可以将该5轴机床的各个部件逐一进行分解。其中X轴为导轨左右运动的线性轴、B轴为工作台绕Y轴摆动的旋转轴、C轴为工作台绕Z轴回旋的旋转轴、Y轴为导轨前后运动的线性轴、Z轴为带动主轴上下运动的线性轴。工程师完成对机床部件的测绘以后,需要根据实际尺寸在CAD软件中进行机床部件绘图,建立机床各部件的三维立体模型,然后通过格式转换器将默认的数据文件转换成为STL数据格式,如表1所示。

图1 Mikron HSM 400U数控机床
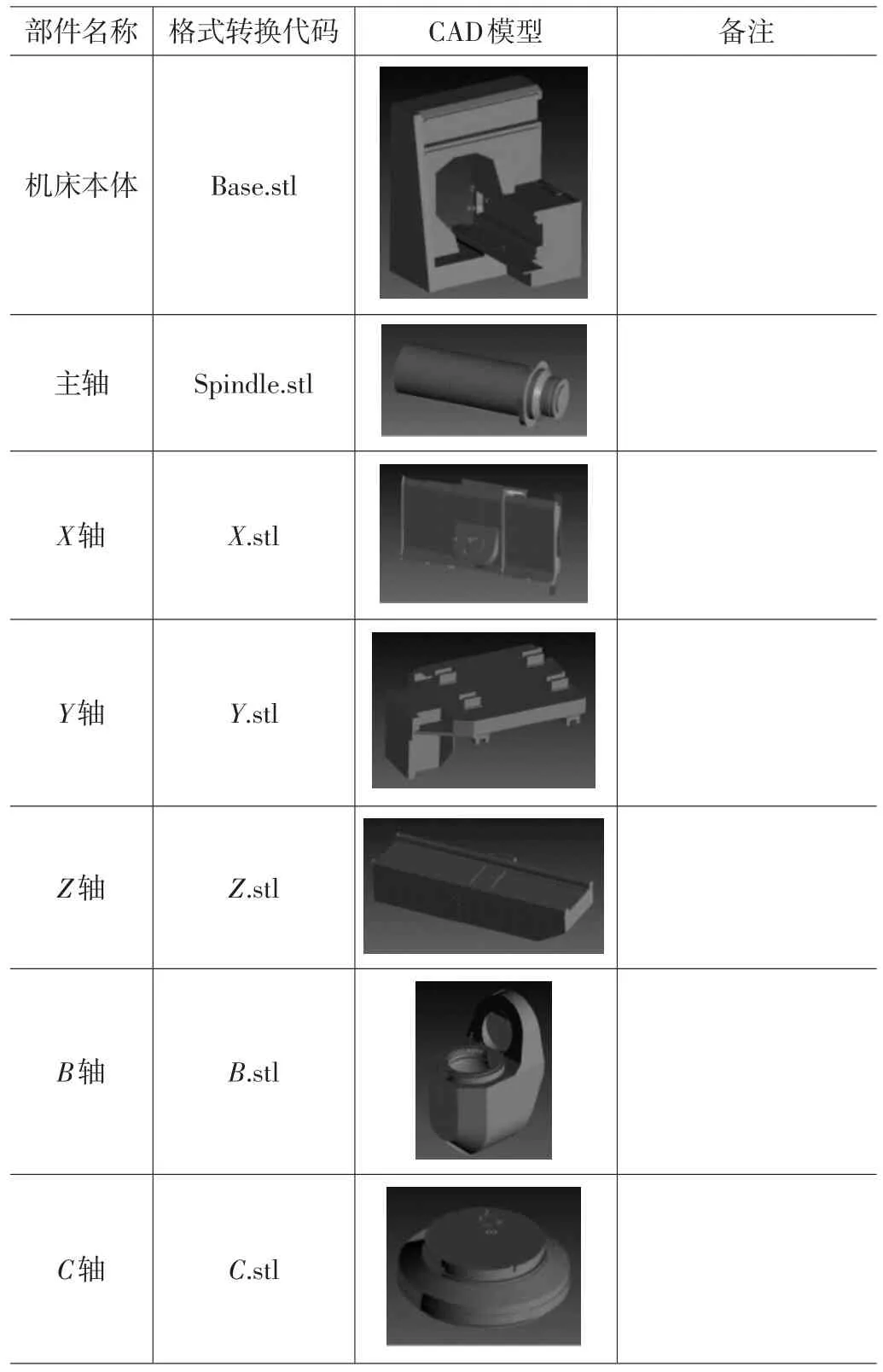
表1 机床部件模型对照表
2.2 虚拟装配中的数学分析
在CAD软件中完成数控机床各部件仿真建模以后,就需要确定机床各部件之间的装配关系。仿真机床的基本装配关系包括几何关系和运动关系。
几何关系描述机床各部件模型之间的空间几何信息,包含了对齐、偏置、接触、配合等[6]。运动关系包括相对运动关系和传动关系。5轴数控机床中的相对运动关系主要有直线运动和旋转运动;而整台机床的装配传动则有链传动、齿轮传动、螺纹传动等。在空间内虚拟装配机床模型时,需要抽象出机床各个部件之间的装配关系,根据相应的从属关系的逐步装配机床部件[7]。本文针对Mikron HSM 400U 5轴数控机床的装配关系展开分析。
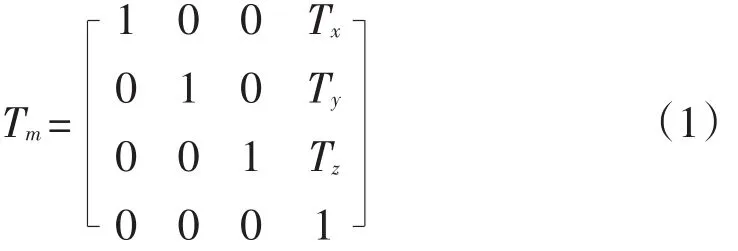
在装配过程中,机床每个部件的位置和姿态可以通过一个矩阵S来表达为:S=TmRxRyRz。其中Tm指模型在空间内的平移变换,其矩阵表达式为:
Rx指模型绕坐标轴旋转了α角,其矩阵表达式为:

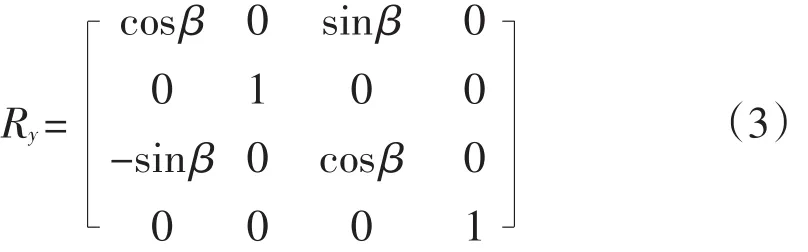
Ry指模型绕坐标轴旋转了β角,其矩阵表达式为:
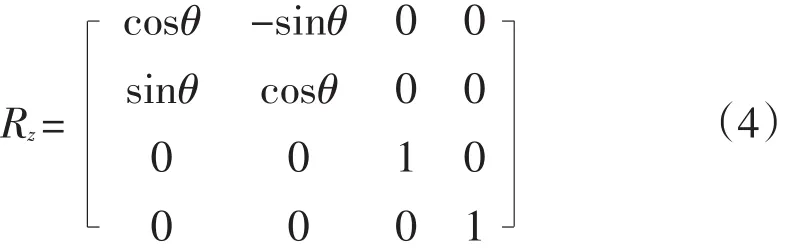
Rz指模型绕坐标轴旋转了θ角,其矩阵表达式为:
2.3 Mikron HSM400U数控机床的结构分析
对于一台数控机床而言,各部件的关系并不是相互独立的,它们之间按照一定的装配关系构成联系。通过对Mikron HSM400U型5轴联动数控机床结构简化分析可知,它的移动轴有X轴、Y轴、Z轴,旋转轴有B轴、C轴。
机床各轴与机床本体、机床主轴、加工刀具以及工装夹具共同形成了两条运动链,分别为工件运动链:Base(机床本体)→X轴→B轴→C轴→Attach(附属)→Fixture(夹具)→Stock(毛坯);刀具运动链:Base(机床本体)→Y轴→Z轴→Spindle(主轴)→Tool(刀具)。在运动链中的各个部件均依附于上一级部件,形成了“父”与“子”的依附关系,其中“子”一级部件的状态和位置的变化受到“父”一级部件的影响。
2.4 Mikron HSM400U数控机床的虚拟装配
在VERICUT数控仿真平台中要进行5轴数控加工仿真,最为关键的环节是建立虚拟5轴数控机床,可以在数控库中选择与实际数控机床所对应的控制系统“hei530.ctl”。Mikron HSM400U5轴数控机床的旋转轴B轴依附于线性轴X轴,B轴状态和位置变化会随着X轴的移动而发生变化。此时需要特别注意在VERICUT项目树中准确选择节点X(0,0,0)所在的位置,进行“添加”→“B旋转”的操作,如图2所示。然后在节点B(0,0,0)选择“添加模型”→“模型文件”,选择在表1)中格式转换的文件“B.stl”,在“配置模型”窗口更改该部件的“颜色”为“15:Blue”完成B轴装配,如图3所示。
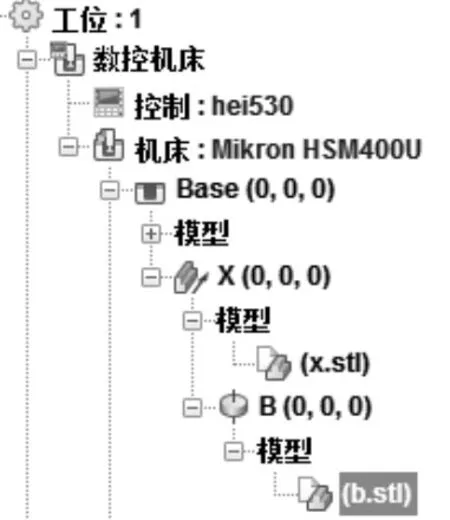
图2 B轴结构树
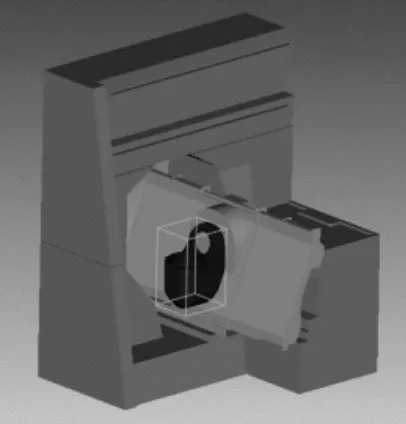
图3 B轴模型装配
旋转轴C轴依附于旋转轴B轴,C轴状态和位置变化会随着B轴的旋转而发生变化。在VERICUT项目树中选择节点B(0,0,0)所在的位置,进行“添加”→“C旋转”的操作,如图4所示。然后在节点C(0,0,0)选择“添加模型”→“模型文件”,选择在表1中格式转换的文件“C.stl”,在“配置模型”窗口更改该部件的“颜色”为“16:Dark Goldenrod”进行C轴模型装配,如图5所示。

图4 C轴结构树
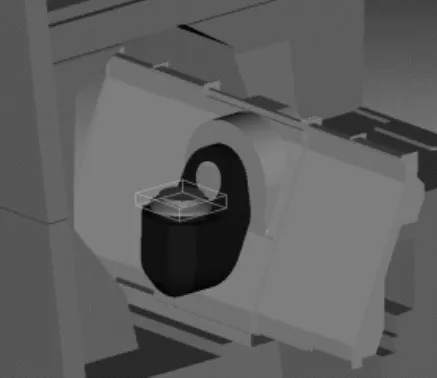
图5 C轴模型装配
根据工件Mikron HSM400U数控机床的工件运动链、刀具运动链,设定主轴等各个部件之间的装配关系(见图6)后可建立与真实机床相对应的多轴加工仿真平台,如图7所示。
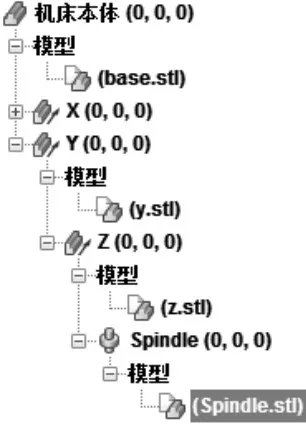
图6 主轴结构树

图7 多轴加工仿真平台
2.5 多轴加工仿真验证
经过Mikron HSM400U多轴加工仿真平台优化的数控程序能够通过RS232端口由个人计算机发送至数控机床的内存中,该机床搭载的Heidenhain iTNC530控制系统读取程序代码之后,驱动机床各组件进行5轴联动数控加工,依次完成叶轮的轮毂、叶片以及倾斜平面的加工。通过调入数控NC程序进行虚拟仿真加工,有效地保障了5轴数控加工刀具轨迹的安全性和正确性,成功避免了机床各个部件、加工刀具以及工装夹具之间的碰撞干涉,使得仿真加工(见图8)与多轴数控加工(见图9)具有良好的一致性。
图8 仿真加工

图9 多轴数控加工
3 结语
加工仿真是虚拟制造技术的关键部分,仿真机床具备了现实加工系统中的全部属性和功能,可以用于仿真和检测数控加工过程中各种因素的影响。建立仿真机床需要将机床本体和各个部件的尺寸进行测绘并建立三维模型,然后按照真实机床坐标系中各线性轴、旋转轴的逻辑关系和运动关系进行机床的虚拟装配。Mikron HSM 400U多轴加工仿真平台能真实再现机床的运动轨迹,并且在模拟NC程序所表达的刀具加工路径,检测数控加工过程中可能出现的碰撞干涉,为生产加工提供了安全保障。
猜你喜欢
经纬天地(2022年3期)2022-07-20 01:17:02
装备制造技术(2021年1期)2021-05-21 07:54:52
哈尔滨轴承(2021年4期)2021-03-08 01:00:48
装备制造技术(2020年9期)2021-01-26 00:15:30
制造技术与机床(2019年12期)2020-01-06 03:18:26
制造技术与机床(2019年12期)2020-01-06 03:17:26
制造技术与机床(2018年12期)2018-12-23 02:41:20
电子制作(2018年10期)2018-08-04 03:24:46
制造技术与机床(2017年10期)2017-11-28 05:20:46
制造技术与机床(2017年2期)2017-05-04 04:17:37
