复杂水域船舶智能避碰专家系统设计
2019-07-03 09:34
船海工程 2019年3期
(大连海事大学 综合运输研究所,辽宁 大连 116026)
复杂水域船舶密度较大,航行环境多变,发生碰撞事故的风险较高[1],准确地确定碰撞危险度是实现船舶智能避碰的前提之一[2-3]。已有的研究考虑碰撞影响因素较少(大多考虑船位、航速、航向等因素),未能体现风、浪、流及能见度的影响[4-6],并且计算碰撞危险度后,少有研究给出具体的航行方案和航行提示。因此,考虑设计一种利用原始数据计算复杂水域中碰撞危险度的方法,将复杂水域中环境危险和船舶危险区别对待,提出环境危险度的概念及计算方法,设计专家系统,构建避碰规则库,根据不同的环境和碰撞危险,给出相应的避碰方案,为驾驶员提供航行参考。
1 碰撞危险度计算
1.1 数据处理
选取复杂水域中两船相对航速(同时考虑两船航速以及航向)、距离、能见度、风、浪、流为碰撞主要影响因素。两船相对航速利用几何学的矢量合成得到,见图1,航向不在影响因素中单独列出。

图1 相对航速示意
利用模糊理论对碰撞影响因素进行模糊化处理。其中,由于航速跨度较大(0~30 kn),所以利用二元对比排序法确定其隶属度,其他影响因素用模糊分布方法确定隶属度。
(1)
根据对海上避碰行为的研究,航速的模糊集分别用A(Vi)表示超低速(0~5 kn)、B(Vi)表示低速(0~10 kn)、C(Vi)表示中速(5~15 kn)、D(Vi)表示中高速(10~20 kn)、E(Vi)表示高速(15 kn以上),U={V1,V2,V3,…,Vn}为给定的航速论域,利用二元对比排序法设计算法,确定论域U中的元素隶属于模糊集超低速A(Vi)的隶属度μA(Vi)。
步骤1。对任意的Vi∉(0,5),μA(Vi)=0。
步骤2。对任何一对Vi、Vj∈U进行比较,得到以Vj为标准Vi隶属于A(Vi)的程度值fVj(Vi),以及以Vi为标准Vj隶属于A(Vi)的程度值fVi(Vj)。
作如下假设:
(2)
可以得到相对隶属程度矩阵如下。
(3)
步骤3。计算相对优先度函数f(Vi/Vj)。
(4)
或
(5)
步骤4。以相对优先度f(Vi/Vj)为元素构造相对优先矩阵G。
(6)
步骤5。对相对优先矩阵的每一行取最小值或平均值,即可得论域U中的元素隶属于模糊集超低速A(Vi)隶属度μA(Vi)。
(7)
或
(8)
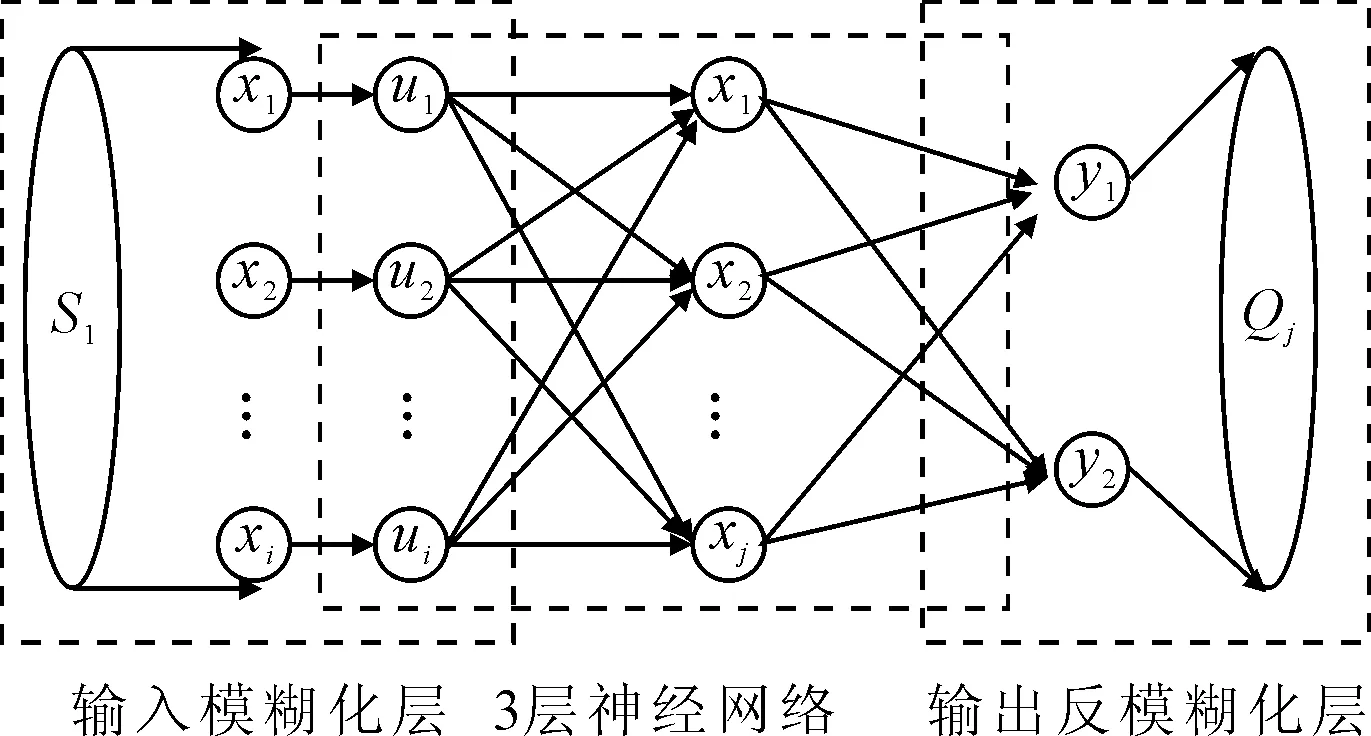
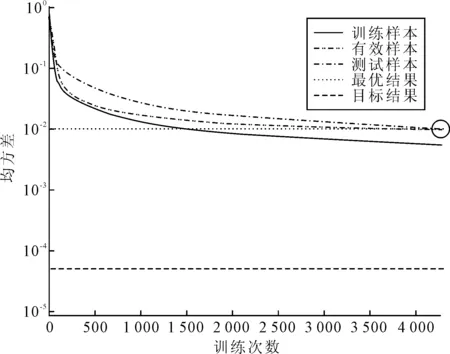
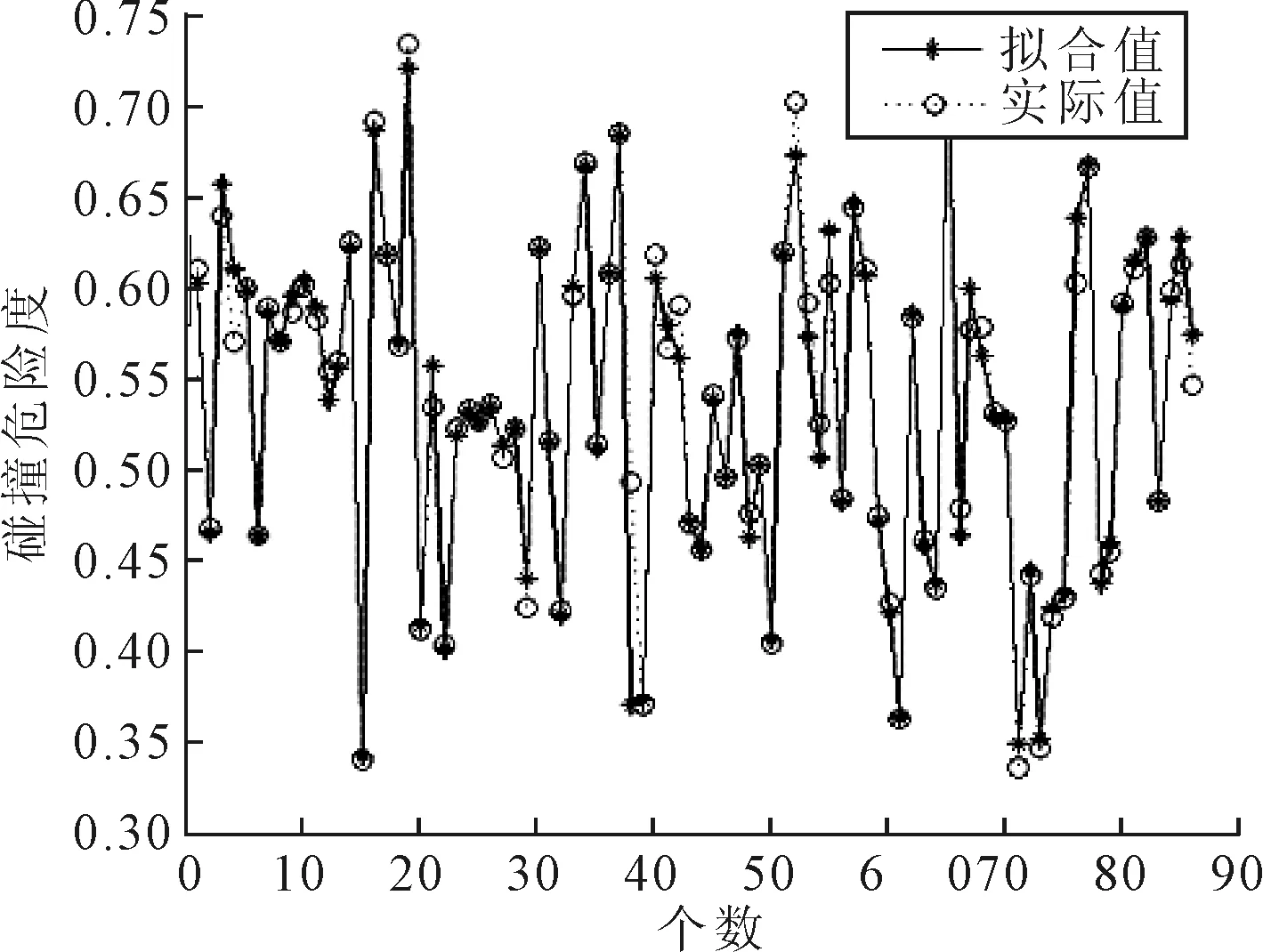
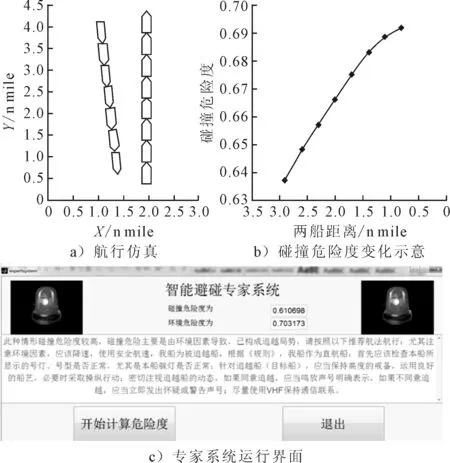
对于模糊集B(Vi)低速(0~10 kn)、C(Vi)中速(5~15 kn)、D(Vi)中高速(10~20 kn)、E(Vi)高速(15 kn以上)隶属度的确定同理,不过在步骤2相对隶属程度的确定中,有些许差异,例如确定元素Vi隶属于模糊集B(Vi)的隶属度,如果0 (9) 其他模糊集的隶属度同理。 一般认为两船相距>6 n mile,不致构成紧迫局面,因此将两船距离分为5个模糊集,分别为很近(DS)、较近(DMS)、中等(DM)、较远(DML)、很远(DL),而在确定这5个模糊集的隶属度时,采用模糊分布的方法,选择最常用的隶属函数(三角形隶属函数)来进行量化,结果见图2。 图2 两船距离的隶属度示意 能见度、风、浪、流的隶属度确定方法同理,其中能见度的模糊集为 {极差NS,较差NMS,中等NM,较好NML,良好NL}。 风的模糊集为 {小风WS,较小风WMS,中等风WM,较大风WML,大风WL,极大风WVL}。 浪的模糊集为 {轻浪LS,较轻浪LMS,中浪LM,较大浪LML,大浪LL}。 流的模糊集为 {弱流FS,较弱流FMS,中流FM,较强流FML,强流FL}。 定义1[7]。船舶碰撞危险度(collision risk, CR)表示船舶在其航行过程中发生碰撞危险的可能性大小及相应碰撞程度的重要参数。 根据定义1,构建计算方法。 (10) 式中:CR为碰撞危险度,取值范围为(0,1);w为每个影响因素的重要程度;μ为每个影响因素的元素对于某个模糊集的隶属度;r为某个模糊集的危险度。参考文献[8]的方法,碰撞影响因素的重要程度值w分配如下:wV=0.21,wd=0.29,wn=0.18,ww=0.12,wl=0.11,wf=0.09。 定义2。环境危险度(collision risk of environment, CRE)为在特定的航行环境下,由于环境因素(包括能见度、风、浪、流等)造成的船舶之间碰撞的可能性,是衡量环境危险程度的重要参数。 (11) 不同影响因素的不同模糊集赋予不同的危险度,见表1。 构建两个神经网络模型:碰撞危险度神经网络和环境危险度神经网络。模糊神经网络主要由数据库、样本库、推理机制等三部分构成,其具体结构见图3。 表1 不同影响因素的各种模糊集对应的碰撞危险度 图3 模糊神经网络结构 1)输入模糊化层,包括n个碰撞危险度影响因素的输入节点xi和模糊隶属度节点μi,二者连接为隶属度传递函数,具体见1.1。 2)3层神经网络,包括隶属度节点μi、基于样本库和推理机制进行学习的隐含节点xj以及输出节点yi,其中 xj=f(wij+bi) (12) wij为节点之间的权重,f为传递函数,bi为偏置; 3)输出反模糊化,将输出节点yi经过反模糊化后得到输出结果。 专家系统由三部分构成,数据库、知识库和推理机,具体工作流程见图4。 图4 专家系统流程 在计算碰撞危险度时,输入节点为相对航速(V)、两船距离(d)、能见度(n)、风(w)、浪(l)、流(f),构建了一个6输入1输出的神经网络,隐层节点的个数采用2n+1=13个。 构建了含86条样本的样本库,以供神经网络学习。从图5可以看出经过4 287次训练后,均方差开始收敛,碰撞危险度的拟合值和实际值见图6,可见经过训练后的神经网络计算碰撞危险度较为准确,误差较小,不超过0.03。 图5 碰撞危险度神经网络训练结果 图6 碰撞危险度拟合值和实际值比较 在计算环境危险度时,同样选取了86种航行情况,利用式(11)进行计算,输入节点为能见度(n)、风(w)、浪(l)、流(f)4种环境危险度影响因素,输出为环境危险度,构建了4-9-1的3层BP神经网络。 图7 环境危险度神经网络训练结果 从图7可以看出经过1 073次训练后,均方差开始收敛,环境危险度的拟合值和实际值对比见图8,可见经过训练后的神经网络计算环境危险度的效果较好,误差较小,不超过0.01。 图8 环境危险度拟合值与实际值比较 在复杂水域实际船舶航行中,主要有3种会遇态势:对遇、追越、交叉相遇,《1972年国际海上避碰规则》对不同的会遇态势下采取避碰行动有不同的规定,船舶智能避碰专家系统分别对这3种会遇态势进行实验验证,实验中的两艘船舶参数见表2,同时,设计了3种航行仿真情况,3种航行情况的参数见表3。 表2 实验船舶参数 表3 航行情况参数 1)情形分析一。两船航行的仿真模拟见图9a),利用提出的计算碰撞危险度的方法结果见图9b),可见随着两船距离的减少,碰撞危险度逐渐增加。 将航行参数输入后,如有危险,会出现警告提醒界面,同时触发警报装置,提醒驾驶员注意。而后会显示见图9c)的避碰方案界面,同时显示碰撞危险度和环境危险度,避碰专家系统判断出该种局势已构成对遇局势,并且提示驾驶员导致碰撞的重点原因是船舶,应重点注意目标船的动态,给出避碰方案。 图9 情形一 2)情形分析二。两船航行的仿真模拟及碰撞危险度的变化见图10a)、b),可见两船的碰撞危险度随距离的减小近乎于呈线性上升,智能避碰专家系统判断的结果见图10c),同时也会触发警告界面和警报装置。随后计算出开始时碰撞危险度约为0.611,环境危险度约为0.703,环境因素导致的碰撞危险较大,并且该种情形构成了追越局面,推荐航行方案如专家系统界面所示,尤其注意环境因素,遵守避碰规则,有效实现避碰。 图10 情形二 3)情形分析三。两船航行的仿真模拟见图11a),碰撞危险度的变化见图11b),可见情形开始时碰撞危险就高达0.692,并且随着两船距离减少,碰撞危险增加。系统在触发警告界面和警报装置后,显示界面见图11c),判断出该种情形的碰撞危险主要由目标船和环境因素共同导致,并且构成了交叉相遇局势,根据避碰规则和航行习惯,给出航行方案。 图11 情形三 1)对遇、追越、交叉相遇3种会遇态势仿真结果表明,所设计的复杂水域智能避碰专家系统可以根据原始数据直接计算出碰撞危险度和环境危险度,并且能够根据危险度和航行环境,提示驾驶员重点注意的碰撞影响因素,给出不同的航行提示和建议,符合避碰规则和航行习惯。 2)在实际航行中,两船航速、航向、距离、能见度等信息可以通过AIS和雷达得到,风、浪可以通过风速记录仪测得,海流可以通过多普勒计程仪和GPS显示的船舶对地、对水航速推算得到,因此可以结合实时的船舶航行数据与智能避碰专家系统进行判断,具有应用价值。 3)在提出环境危险度时,已考虑能见度、风、浪、流等多个气象环境影响因素,实际上浅水效应和岸壁效应等航行环境的作用也不容忽视,所以今后应结合浅水效应和岸壁效应对危险度作更深入的研究。
1.2 碰撞危险度计算


2 系统构建
2.1 神经网络模型的构建

2.2 专家系统的构建

3 仿真和结果分析
3.1 神经网络模型的训练


3.2 专家系统的实现




4 结论
猜你喜欢
中国CT和MRI杂志(2022年9期)2022-09-02
西北大学学报(自然科学版)(2022年4期)2022-08-10
水上消防(2022年1期)2022-06-16
安庆师范大学学报(自然科学版)(2022年1期)2022-03-05
舰船科学技术(2021年4期)2021-05-17
海洋开发与管理(2020年2期)2020-09-10
火力与指挥控制(2020年7期)2020-08-22
价值工程(2020年19期)2020-07-23
中国当代医药(2018年4期)2018-04-26
广东造船(2016年3期)2016-07-13