
平面天线阵快速正交投影波束形成算法
2019-06-28 09:50
雷达科学与技术 2019年3期
(南京理工大学电子工程与光电技术学院, 江苏南京 210094)
0 引言
阵列信号处理中常采用自适应数字波束形成技术对各阵元加权,达到增强期望信号,抑制干扰信号的目的。近年来,自适应数字波束形成在雷达、地震勘测、医疗、无线通信、语音处理等方面得到了越来越广泛的应用[1]。雷达系统中常采用大型平面天线阵列来获得大的天线增益,提高作用距离,但这导致了自适应算法运算量很大。为了满足雷达系统的实时性处理要求,许多学者开展了快速数字波束形成算法研究。
大型天线阵列常采用子阵级自适应阵列处理和降秩自适应阵列处理等部分自适应波束形成算法来减少计算量,提高收敛速度[2]。文献[3]利用阵列接收的快拍数据来构造降秩矩阵中的干扰子空间,具有很好的实时性,然而该方法不适用于接收信号中含有期望信号的场景。文献[4]提出的基于GSC的快速降秩算法,适用于接收信号中含有微弱期望信号的场景,但当信噪比升高时,下支路中阻塞矩阵无法完全阻塞期望信号,导致输出信干噪比下降。部分自适应波束形成算法虽然能够快速计算出自适应权重,但在快拍数据较多的情况下,算法输出信干噪比性能明显降低。
针对接收信号含有期望信号的问题,文献[5]提出了基于DOA估计的波束形成算法。然而当干扰个数增加时,计算量也会随之增大。此外,当期望信号和干扰信号强度相当时,由于无法分辨出干扰信号和期望信号,DOA估计失效,该方法不再适用。传统的正交投影波束形成[6]是一种快速波束形成算法,但是该方法只适用于接收信号中不含期望信号的场景。文献[7]提出用二项式对消构造阻塞矩阵的方法来阻塞掉期望信号,然后再进行正交投影波束形成。然而该阻塞矩阵构造方法只适用于一维线阵。
本文提出了一种适用于二维面阵的基于阻塞矩阵的正交投影快速数字波束形成算法,该方法适用于连续波体制、HPRF-PD体制和LFM脉冲压缩等体制雷达。算法首先将采样数据进行二维阻塞矩阵预处理变换剔除掉期望信号,在此基础上再进行正交投影。该方法在低信噪比和高信噪比下均适用,计算量较小,能满足大型阵列实时性较高的要求。
1 信号模型
考虑一M行N列的矩形均匀平面阵列,如图1所示,图中黑点表示天线单元。从第一行第一个阵元开始向右以蛇形对阵元进行编号,共有MN个阵元。各阵元横向间距为dx,纵向间距为dy。有一个期望信号和L个互不相关的窄带干扰信号入射,则天线阵列在t时刻接收到的信号可表示为
(1)
(2)
βn,i=An,1ui+An,2vi
(3)
ui=sin(θi)cos(φi)
(4)
vi=sin(θi)sin(φi)
(5)
式中,si(t)为干扰信号的复包络;N(t)为噪声,这里假定为高斯白噪声;a(θi,φi)为方位角、俯仰角分别为θi和φi的干扰信号的导向矢量;An,1为第n个阵元的横坐标,An,2为第n个阵元的纵坐标;λ为接收信号波长。
阵列接收数据的相关矩阵为
R=E{x(t)xH(t)}
(6)
实际应用中,通常用K次快拍数据估计协方差矩阵:
(7)
式中,K为快拍数。
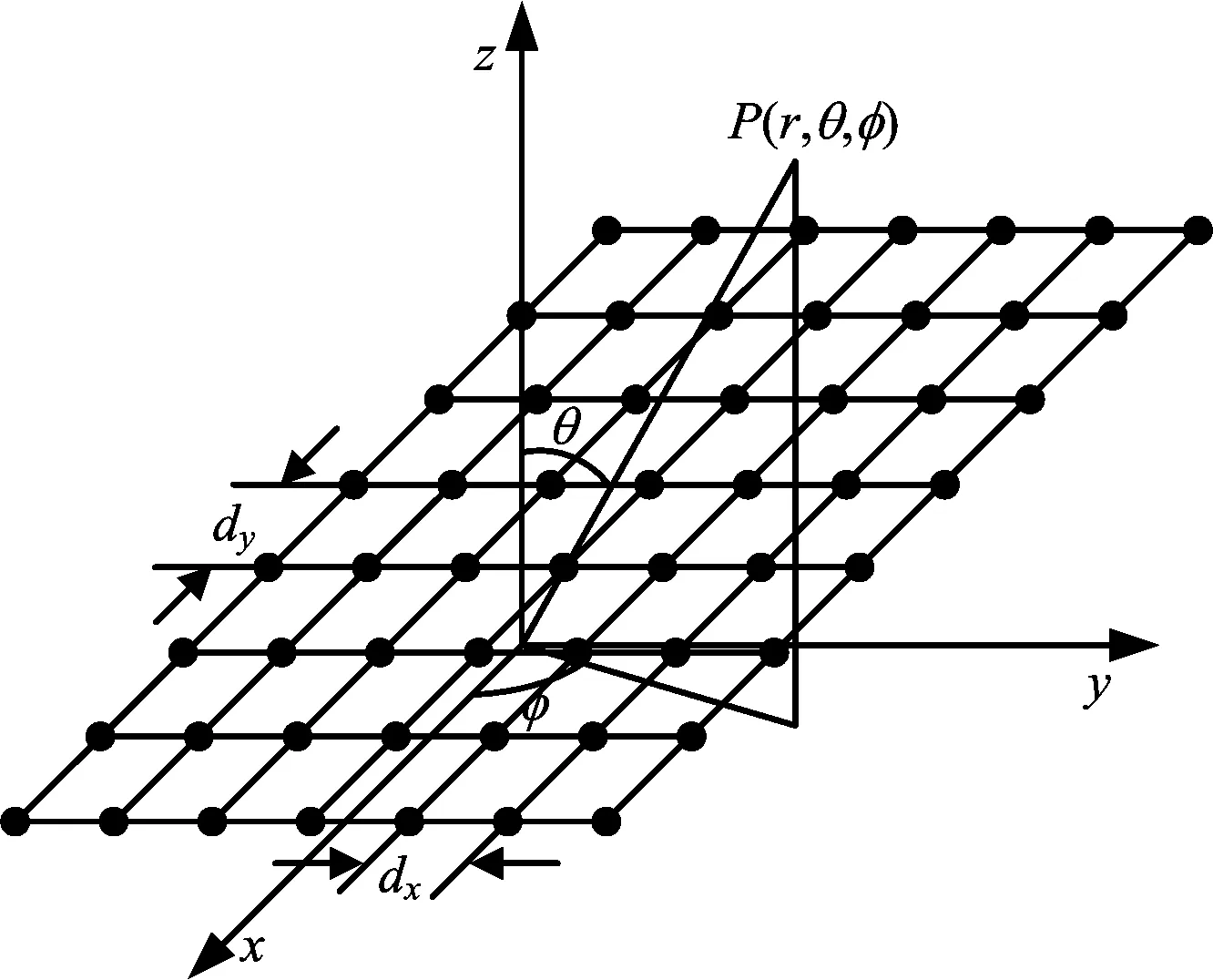
图1 天线坐标系下平面阵列示意图
2 正交投影算法
在传统的正交投影算法中,接收信号不含有期望信号。考虑一M行N列的矩形均匀平面阵列,有L个互不相关的窄带干扰信号入射。由式(1)可知,天线阵列在t时刻接收到的信号可表示为
(8)
文献[6]首先对快拍数据X进行施密特正交化,施密特正交化过程如下:
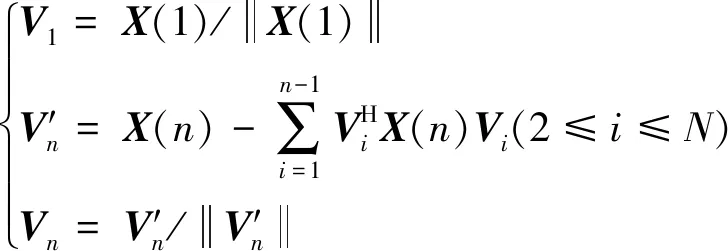
(9)

(10)
停止正交化,则V=[V1V2…VN]为重构的干扰子空间的一组正交基。正交化自适应门限可以通过式(11)确定:
(11)
最后将静态权矢量往干扰子空间上投影得到自适应权重,这就是正交投影波束形成算法:
(12)
式中,wq为阵列静态权矢量,Vn为干扰子空间的正交基。
由式(12)可以看出,自适应权重向量与干扰子空间正交,有信号对消的作用,因此当自适应权作用在快拍数据上,能够抑制干扰信号。若接收信号中含有期望信号时,重构的信号子空间为干扰信号子空间的期望信号子空间的和空间,w在对消干扰信号的同时,对期望信号也会有抑制作用。因此,正交投影波束形成算法只适用于采样数据中不含有期望信号的场景。然而许多雷达应用场景中,接收信号中除了干扰信号外,不可避免地存在期望信号。为了保证正交投影波束形成算法在小快拍数下的优良性能,本文提出了一种新的平面阵列阻塞矩阵的构造方法。将接收数据通过预处理,阻塞掉期望信号,在此基础上实现正交投影波束形成算法。
3 基于阻塞矩阵的快速正交投影波束形成算法
3.1 阻塞矩阵

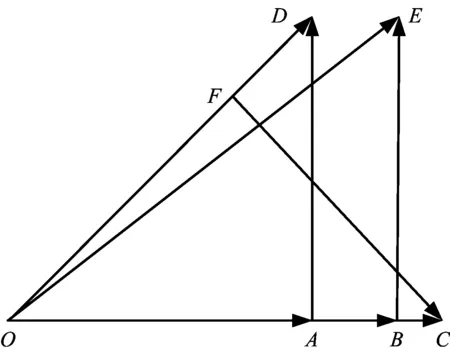
图2 信号子空间向量示意图
图2中OD为原干扰子空间,OE为原接收信号子空间(包含期望信号),BE为现干扰子空间,OC为期望信号子空间,FC为OP算法自适应权重。
如图3所示,本文提出的阻塞矩阵构造原理是:将阵元R接收数据(期望信号、干扰信号和噪声信号)与相位补偿后的阵元Q、P的接收数据相对消得到阵元R接收数据中的干扰信号和噪声信号分量,以此来阻塞期望信号。
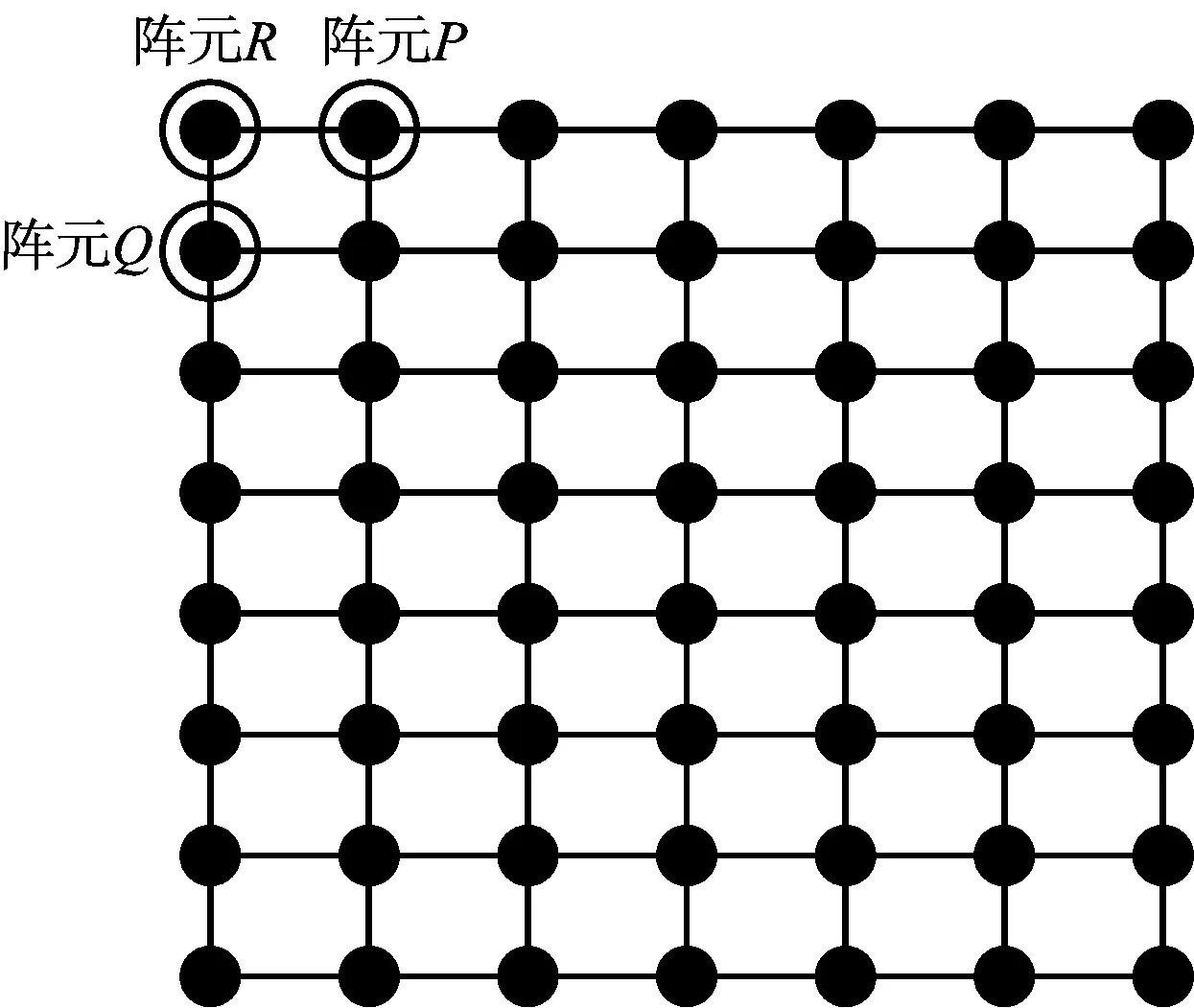
图3 二维平面阵列阵元分布
在M行N列矩形均匀面阵模型下,假设t时刻接收到的快拍数据矢量为x(t),则第R个阵元接收到的数据xR可表示为
(13)
对xR作如下处理:

(14)

x(t)′=B·x(t)
(15)


(16)
βn,0=An,1u0+An,2v0
(17)
u0=sin(θ0)cos(φ0)
(18)
v0=sin(θ0)sin(φ0)
(19)
B为阻塞矩阵,An,1,An,2分别为第n个阵元的横纵坐标,(θ0,φ0)为期望信号的指向。
该阻塞矩阵适用于任意阵型的二维面阵,利用填充的方式构造阻塞矩阵,计算量很小。
3.2 算法总结
现将基于阻塞矩阵预处理的正交投影算法的具体步骤归纳如下:
1) 取大于干扰数L的快拍数即可;
2) 用二项式对消法构造阻塞矩阵B阻塞掉期望信号;
3) 直接对阻塞后的快拍数据进行施密特正交化,并同时用阈值判别法判断出干扰的个数,得到标准正交向量构成的干扰子空间;
4) 将期望信号的导向矢量向干扰子空间的正交补空间上投影得到自适应权重向量。
3.3 计算量分析
表1列出了本文算法的计算复杂度。传统的SMI[12]、ESB[13]算法,由于需要特征值分解,计算复杂度为O(N3),十分不利于工程实现。本文算法复杂度为O(L2N),与OP算法相当,能够在有限时间内快速计算出自适应权重,在实际应用中具有更优的实时性,有利于算法的工程实现。

表1 本文算法的计算复杂度
注:N为阵元数,L为干扰数,K为快拍数。
4 计算机仿真实验和性能分析
仿真一 考虑一32×32的矩形平面阵列,假定来自不同方向的远场窄带信号互不相关,信号与加性噪声也不相关。期望信号的到达方向为(10°,0°),两个干扰的方向分别为(-25°,0°),(50°,0°),信噪比为0 dB,干噪比为30 dB。
图4为32×32的矩形平面阵列的三维方向图。图5给出了接收信号中含有期望信号时用本文算法、SMI算法、ESB算法和降秩GSC算法仿真得到的输出信干噪比随快拍数变化的曲线。为了更好地验证本文算法的有效性,还给出了接收信号中不含期望信号时OP算法的SINR曲线。
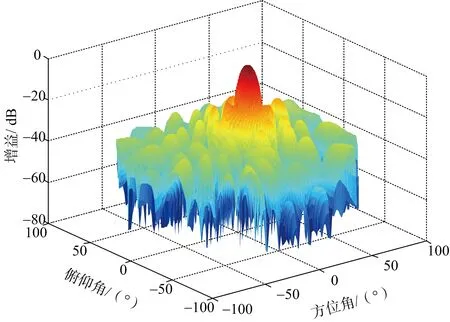
图4 32×32矩形平面阵列三维方向图
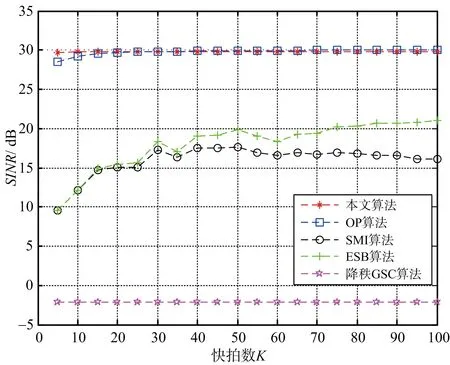
图5 阵列输出SINR随快拍数K变化曲线
从图中可以看出,本文算法在小快拍数下SINR要优于SMI算法、ESB算法,与传统的OP算法差不多,甚至比OP算法更为稳定,因为基于二项式对消法的阻塞矩阵对数据有平滑作用。由于在较高输入信噪比时,降秩GSC下支路的阻塞矩阵不能完全阻塞期望信号,导致上下支路对消时损失部分期望信号分量,输出信干噪比较低。
仿真二 考虑一32×32的矩形平面阵列,假定来自不同方向的远场窄带信号互不相关,信号与加性噪声也不相关。期望信号的到达方向为(10°,0°),两个干扰的方向分别为(-25°,0°),(50°,0°),干噪比为30 dB,快拍数为20。在不同信噪比下比较了样本信号中含有期望信号时采用本文算法和不含期望信号时采用正交投影算法得到的方向图,如图6所示。
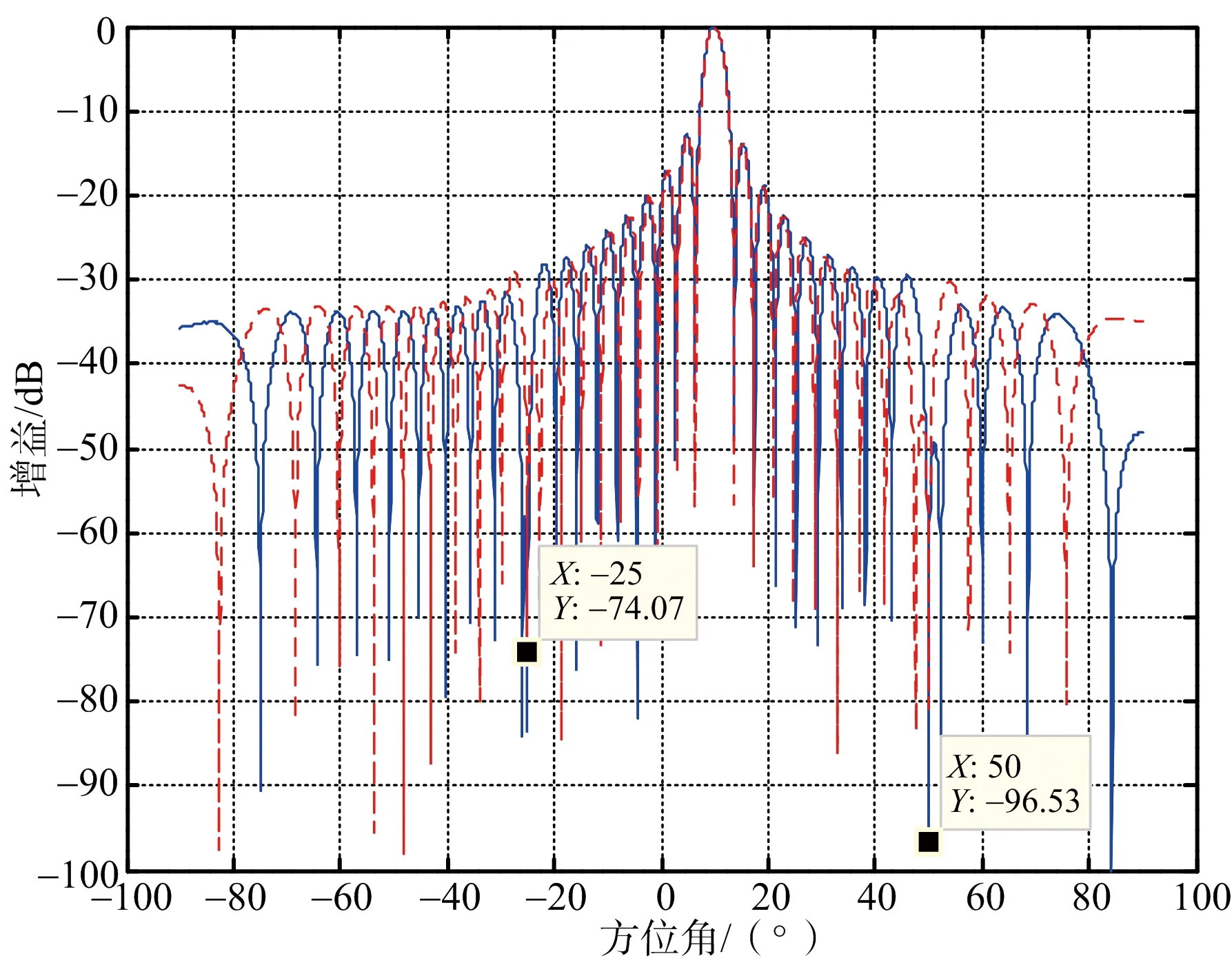
(a) SNR=0 dB
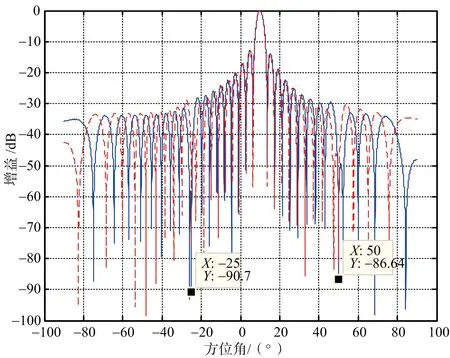
(b) SNR=30 dB图6 不同信噪比下阵列方向图
由图6可以看出,本文算法在零陷深度和旁瓣幅度方面,与不含期望信号时的OP算法性能相当。对比图6(a)、图6(b),在小快拍数下,无论是强信号还是弱信号,用本文算法都能得到良好的抗干扰性能,干扰处零深达到-70 dB以下。
5 结束语
传统的正交投影(OP)自适应数字波束形成算法计算量小,收敛速度快,但该算法只适用于采样信号中不含期望信号的场景,限制了其在雷达中的应用。本文针对平面阵列天线提出采用阻塞矩阵对接收信号进行预处理,阻塞掉期望信号,然后构造新的协方差矩阵,再进行正交投影波束形成。新算法适用于接收信号中含有期望信号的场景,无论是强信号还是弱信号下,输出SINR和方向图都能在小快拍数下迅速收敛,具有与接收信号中不含期望信号的OP算法相当的性能。
猜你喜欢
计算技术与自动化(2022年2期)2022-07-04
现代仪器与医疗(2022年1期)2022-04-19
北京理工大学学报(2021年12期)2022-01-13
海军航空大学学报(2021年1期)2021-09-01
成都信息工程大学学报(2021年6期)2021-02-12
数字海洋与水下攻防(2020年6期)2020-12-25
现代电子技术(2020年3期)2020-08-04
舰船电子工程(2020年3期)2020-06-11
舰船电子对抗(2020年1期)2020-04-27
舰船科学技术(2020年3期)2020-04-22
