平面四杆机构在舰载垂直发射装置舱口盖系统中的应用分析
2019-06-05 06:37刘永亮任克亮马旭轮张基明
装备环境工程 2019年5期
刘永亮,任克亮,马旭轮,张基明
(中国船舶重工集团公司第七一三研究所,郑州 450015)
舱口盖系统是舰载垂直发装置的重要组成部分, 既要满足开关盖的技术性能要求,又要在波浪等外载荷的作用下满足刚强度要求[1]。新型超音速导弹要求垂直发射装置有高的贮弹密度和机动性、快的瞬时反应能力,客观上要求舱口盖系统开关盖时间短、反应快、耗能小、可靠性高。
目前垂直发射装置的舱口盖系统主要分为液压式和机电式两大类别。其中液压式舱口盖系统受航区、季节、气候、海况的影响,对液压启闭系统的可靠性要求非常高[2]。在极端情况下,液压系统存在脉动冲击、液压油泄漏等不利因素,影响到舱口盖系统密封的安全性。
平面四杆机构作为一种常见的机械式传动机构,可以方便地实现较复杂的运动。在连杆机构中,可以传递较大的动力。可以得到不同的传动比,实现不同运动规律的要求,便于加工,且生产成本低。
作为一项关键技术,文中提出采用平面四杆机构电动开盖的方式,来实现舱口盖的快速开启和关闭,并通过计算、仿真和试验对舱口盖的技术性能进行摸底。
1 主要性能指标
舰载垂直发射装置带有发控设备,对舱口盖系统发出操控指令,完成舱口盖动作。有以下主要性能指标:
1)自收到发控设备“舱口盖打开”指令到控制设备给出“舱口盖打开好”信号,时间不超过3 s。
2)舱口盖开启角度(甲板面夹角)应大于93°。
2 理论计算
舱口盖开盖解锁机构分为开盖机构和解锁机构两部分[3-10]:开盖机构为平面四杆机构中的曲柄摇杆机构,解锁机构为平面四杆机构的曲柄滑块机构。两机构通过凸轮拨盘实现联动,其动力由一台低速大扭矩电机提供,弹舱盖开盖解锁机构循环完成的动作顺序是:解锁、开盖、关盖、上锁。
根据舱口盖功能要求,确定开盖机构曲柄摇杆机构各构件的长度及其传动比,进行负载分析,完成电机的转速及输出转矩计算。然后运用机械系统仿真软件ADAMS进行计算机仿真。
2.1 确定各构件的长度及传动比
考虑装置上所提供的安装空间,最终选用下面的曲柄摇杆机构来实现传动,其运动分析如图1所示。机构中两个死点位置位于同一直线上,即图1中所示的C1和C2点。其中,曲柄为杆CD;摇杆为杆AB;机构中 AB1C1D位置表示舱口盖关闭到位;AB2C2D位置表示舱口盖开启到位。曲柄CD转动幅度为180°,摇杆AB转动幅度为95°。
四杆机构的主要设计参数分别为:AB= 94.85 mm,BC=241.88 mm,CD=70 mm,AD=250.2 mm,θ=28.78°,CD+AD<AB+BC,满足杆长条件。
随着舱口盖开启角度α的改变,舱口盖连杆机构瞬时传动比也在改变。用 C语言编制相应的计算程序,可以计算出舱口盖开启角度α所对应连杆机构瞬时传动比的数值解,如图2所示。

图2 舱口盖连杆机构瞬时传动比曲线
由曲线可以看出,在接近两个死点位置附近,传动比非常大,在中间位置最小。根据工程应用实际情况,假设曲柄作匀速转动,其角速度为常数。则摇杆即舱口盖的转动角速度的变化趋势为:启动时角速度从0加速到最大,然后减速至终点时为0。在初始位置和终点位置的速度均近似为0,这种变化对开盖是有利的。
2.2 负载分析
由开盖过程可以看出:负载转矩随开启角度的变化而变化,如图3所示。
负载转矩计算:


图3 舱口盖受力
式中:Pw为风载荷,N;Fy为 y方向摇摆过载力;Fz为z方向摇摆过载力。
由此可见,负载转矩随舱口盖开启角度的变化而变化,不是常数。
利用计算机编程求解出舱口盖开启角度负载转矩的数值解。由数值解可以看出,负载转矩在弹舱盖开启约5°时,达到其最大值Mmax=812.7 N·m,如图4所示。

图4 舱口盖负载转矩曲线
2.3 确定所选用电机输出扭矩和转速
1)电机输出扭矩。因为动能的增量必须≥0,从能量角度来说,必须满足W驱≥W负(不考虑摩擦、机械损失),即:

式中:M为电机输出扭矩,N·m;Mt为负载转矩,N·m;为机构传动比。
电机输出扭矩不小于机构传动比与负载转矩的乘积,用C语言编制相应的计算程序进行计算,电机转矩M应满足:M≥569 N·m。
2)电机转速。电机转速主要由开盖时间和机构传动比确定。开盖时间小于3 s,电机转动180°后弹舱盖开启到位,电机转速n应满足:n≥10 r/min。
3 仿真分析
3.1 模型假设
通过对四杆机构的运动分析,作出如下假设:
1)按机构运行情况对各构件分配质量及转动惯量。
2)各构件之间可以相互转动。
3)各杆件连接处在传动过程中,运动副无相对运动。
4)忽略各杆件连接处在传动过程中的摩擦力和磨损情况。
5)忽略各部件之间的装配误差,不考虑其他因素对系统的影响。
3.2 结构描述
四杆机构的拓扑关系如图 5所示。机架通过 f1转动副与曲柄一端联接,曲柄一端通过f2转动副与连杆一端联接,连杆一端通过f3转动副与摇杆联接,摇杆一端通过f4转动副与机架联接。整个系统可以进行平面运动,共9个自由度。

图5 结构拓扑图
3.3 动力学模型
根据动力学模型可导出系统总动能T,总势能V,总耗散能D,它们均为系统的结构参数与广义坐标的函数。由拉格朗日方程得:

x=x(x1,x2,x3…)最后得系统运动微分方程:

式中:[M]、[C]、[K]分别为994阶量矩阵、阻尼矩阵和刚度矩阵;X、X˙、X˙˙分别是广义坐标的位移向量、速度向量和加速度向量;{Q}为广义力向量。
3.4 仿真过程及结果分析
本次仿真环境是在软件 ADAMS/View环境中进行的[11],在驱动连杆的旋转副上加角速度驱动。在作用对象的连杆上加上负载。仿真模型及开盖所需扭矩如图6和图7所示。从图5中可以看出,开盖所需的扭矩大于550 N·m,与理论计算值所得的扭矩不小于569 N·m基本一致,只要电机输出扭矩大于569 N·m就能满足开盖所需动力要求。

图6 舱口盖开盖机构仿真模型
4 试验及结果
对机构进行开盖试验,试验过程中,反复执行开关盖动作数次,记录下每次开盖时间和开盖角度以及机构运行情况,见表 1—4。为验证所选用电机的功率是否满足要求,通过加配重块来模拟风载荷及摇摆载荷,每个配重块质量为30 kg,共3块,每加一块配重块做10次。从表1—4中可以看出,配重块对每次开盖时间和开盖角度影响不大,每次开盖时间均小于3 s,开盖角度均大于93°,且机构运行正常[12-15]。因此开盖时间和开盖角度均满足舱口盖系统主要性能要求。
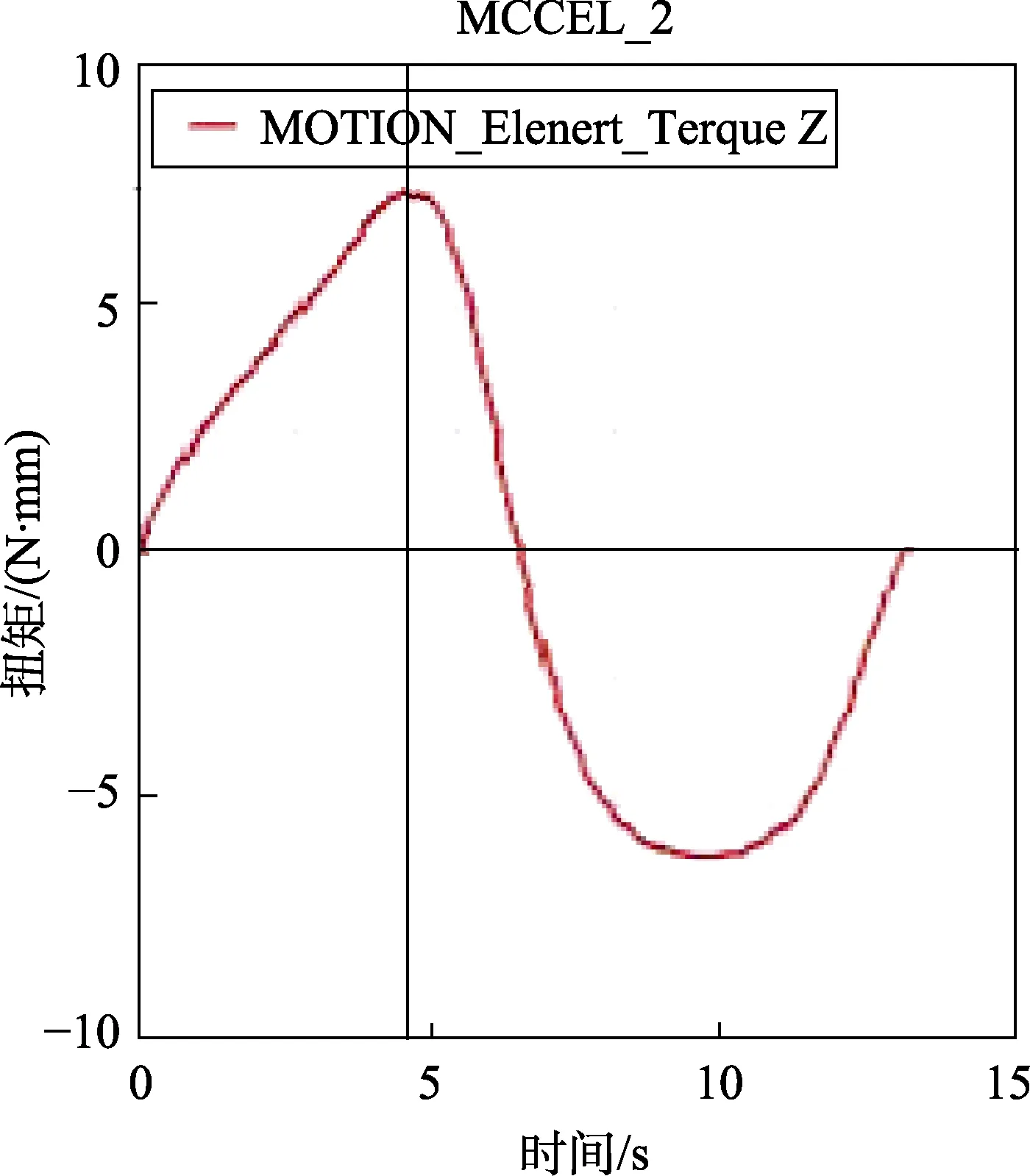
图7 舱口盖开盖机构所需扭矩

表1 不加负载开盖情况

表2 30 kg负载开盖情况

表3 60 kg负载开盖情况

表4 90 kg负载开盖情况
5 结论
四杆机构的设计满足舱口盖系统的主要技术指标要求。通过试验验证了舱口盖系统方案设计可行,运行可靠,实现了快速开盖的战术指标要求,可为其他垂直发射装置的舱口盖设计提供工程经验。
猜你喜欢
数字海洋与水下攻防(2021年5期)2021-11-04
汽车零部件(2020年7期)2020-08-03
中阿科技论坛(中英阿文)(2020年2期)2020-05-27
弹箭与制导学报(2019年5期)2019-05-28
汽车实用技术(2019年9期)2019-05-15
世界博览(2017年1期)2017-04-19
现代电子技术(2017年6期)2017-04-10
中国科技纵横(2016年23期)2017-04-06
科技视界(2016年27期)2017-03-14
航空兵器(2016年4期)2016-11-28