
基于变增益观测器的高超声速飞行器输出反馈控制
2019-06-05 03:31王锦,张伸
宇航学报 2019年5期
王 锦,张 伸
(1.西安工程大学机电工程学院,西安 710048;2.北京航空航天大学自动化科学与电气工程学院,北京100083)
0 引 言
高超声速飞行器一般是指以超燃冲压发动机为动力,飞行速度大于Ma5且飞行高度在20至100 km的临近空间飞行器,是航空工程与航天工程紧密结合的新型高性能产物。其动力装置有效扩展了飞行器的飞行包线,可实现大气层内以更快速度在更大范围内的机动飞行。从而满足更高需求的全球精确打击与快速运输,在军事与商用领域均具有重要意义[1]。
高超声速飞行器具有强耦合、强非线性、模型不确定性及复杂外部干扰等特性,使其飞行控制系统设计面临严峻挑战[2]。传统飞行器中结合增益调参技术的线性系统设计方案已经难以适用[3]。随着近年来非线性控制理论发展的日益深入,国内外学者对基于非线性控制技术的高超声速飞行器控制系统设计开展了广泛研究。较为典型的非线性控制方法包括反馈线性化控制[4]、滑模控制[5]、自适应鲁棒控制[6]、反步控制等[7-8]。
需要指出,大多现有控制器设计方案中认为高超声速飞行器的状态都是可测量的,并设计状态反馈控制器。然而在高超声速环境下,气流角传感器的性能会显著下降,从而造成攻角测量的误差较大。在这种情况下,如果仍采用测量得到的攻角信息去设计控制器将会带来较大的跟踪误差,甚至可能导致闭环系统不稳定[9]。通过能够精确测量的状态信息,构建观测器获得攻角及其他需要的信息,进而产生控制指令是一种行之有效的方法。此种结合状态观测器的信息和测量得到的信息去构建控制器的设计思路是一种间接的输出反馈方法[10]。
现有为数不多的高超声速飞行器输出反馈控制器设计方案也存在一些局限性。文献[11]考虑的被控对象为小扰动线性化的高超声速飞行器动力学模型,给出了一种输出反馈控制方案。该方案采用的信号包括速度、高度、俯仰角速率和加速度,采用全状态观测器获得其他状态的信息,基于状态观测器的信息实现反馈控制。文献[12]先设计了状态反馈控制器,采用一种滑模观测器去构建不可测量状态,然后将此状态估计值直接应用到状态反馈控制器中,是一种状态观测器和控制器独立设计的方法。而实际上,高超声速飞行器是一类具有较强非线性的被控对象,线性控制中控制器和观测器可以分离设计的原理在被控对象存在较强非线性时并不适用。文献[13]采用滑模观测器构建了其他状态的信息,采用Backstepping方法设计了控制器,并基于小增益定理保证了闭环系统的稳定性,但该方法仅适用于锥形体高超声速飞行器,而对于吸气式高超声速飞行器,发动机推力是攻角和燃油率的复杂函数。在此情况下,文献[13]基于小增益定理保证的闭环系统稳定性结论将不再成立。除了处理高超声速飞行器输出反馈的文献外,文献[14]针对存在推力饱和约束的飞机纵向非线性动力学系统研究了输出反馈自适应backstepping控制律,但该方法主要是针对存在未知气动参数的情形,通过一种分段切换自适应律实现未知气动参数的估计。到目前为止,针对吸气式高超声速飞行器全量非线性动力学模型的输出反馈控制方案仍然较少。
另外,高超声速飞行器乘波体气动构型及机身与推进系统一体化设计带来了推进/控制/气动的严重耦合,使得弹道倾角动力学方程或攻角动力学方程中,存在发动机推力的分量,且发动机推力为攻角和燃料当量比的复杂函数,这种特性给控制设计带来了较大的困难。在现有文献中推力对弹道倾角动力学方程的影响通常被忽略[15-16]。然而实际上,在发动机燃油率为1时,即发动机推力最大开启的情况下,推力分量占到整个法向力的1/4,对弹道倾角动力学影响较大。
综合以上分析,本文针对非线性吸气式高超声速飞行器,提出了一种基于变增益观测器的输出反馈控制方案。针对弹道倾角和攻角不可测量的情况,设计了一种变增益观测器。针对推力对弹道倾角动力学的影响,分别在观测器中用变增益的方式和控制器中鲁棒项的方式消除。在设计观测器时,首先通过一种变换将动力学模型变换为双回路串连积分形式,通过变增益系数的自适应律设计保证观测器的稳定性。将实际系统的状态和观测器的状态重新组合成一个新的严反馈系统,采用动态面方法设计控制律。通过控制器中鲁棒项的设计消除耦合项和参数不确定对控制器跟踪性能的影响。
1 模型建立及控制问题描述
1.1 高超声速飞行器建模
高超声速飞行器纵向动力学模型可以采用如下非线性方程描述[17]:
(1)
式中:T,L,D,M分别为高超声速飞行器的发动机推力、气动升力、阻力及俯仰转动力矩,m为飞行器的质量,Iyy为飞行器俯仰轴方向上的转动惯量。模型包含飞行器五个状态量分别为:速度(V)、高度(h)、弹道倾角(γ)、俯仰角(θ)和俯仰角速率(q)。包含两个控制输入:燃料当量比(Φ)和升降舵偏(δe)。对于模型(1)中的两个控制输入,燃料当量比Φ直接影响发动机推力,同时由于推进系统与机身的耦合,其间接的影响俯仰力矩和升力;升降舵偏δe则主要影响气动力。飞行器攻角α满足θ=α+γ。高超声速飞行器所受各力和力矩的详细表达式如下所示:
(2)

(3)
式中:带上标的各变量表示相应曲线拟合系数。
1.2 控制问题描述
对于采用吸气式超燃冲压发动机高超声速飞行器,文献[18]给出其处于冲压巡航飞行时的状态、输入、动压和马赫数的允许范围,如表1所示。
根据表1给出的弹道倾角γ的允许范围,在此范围内可近似认为sinγ≈γ,cosγ≈1。定义状态变量x1=h/V,x2=γ,x3=θ,x4=q。将整个高超声速飞行器动力学模型高度子系统分成内外回路的形式,外回路的动力学模型可以表示如下:
(4)


表1 状态、输入、动压及马赫数的允许范围Table 1 Allowable ranges of states,inputs,dynamic pressure and Ma
w1(x2,x3)=Tsinα/(mV)≈Tα/(mV)=
(5)

内回路的动力学模型可以表示为如下形式:
(6)

本文的设计过程中,认为弹道倾角和攻角信号为不可测量的,高度、俯仰角和俯仰角速率为可以测量的。针对式(4)给出的外回路系统中存在不可测量状态,设计观测器,在此基础上针对式(4)和式(6)的联合系统设计控制器,实现高度回路与闭环系统对给定高度指令信号hd的跟踪。
将整个高度回路分为内外回路的目的是为了方便观测器的设计,但在控制器设计时考虑了内外回路的相互作用,将内外回路联合成一个系统进行控制设计,不需要时标分离的假设。本文设计的目标是在考虑推力和气动力耦合的情况下,采用变增益观测器实现对不可测量状态的估计,继而通过控制器设计实现闭环系统有界稳定,并可通过控制系统参数的选取保证边界的范围。
2 控制器设计
图1为控制方案的结构框图。从图1可以看出,本文所提控制方案主要包括变增益观测器和控制器两部分。下面首先对耦合项进行分析,然后在此基础上完成变增益设计,最后基于观测器状态和可测量的状态信息完成鲁棒自适应动态面控制器设计。

图1 控制器设计框图Fig.1 Controller design block diagram
2.1 耦合项分析
在设计观测器之前,先对耦合项w1(x2,x3)进行分析。由表1可知,x2的大小在一定范围内是有意义的,超出该范围则无意义。在进行观测器设计之前,先假设x2是在一个界限内,考虑鲁棒性,这个界限可以取得比表1中的范围大,然后通过观测器和控制器设计保证闭环系统处在一个有限的界限内。假设|x2|的最大值为N,则存在以下不等式:
(7)
3N|x3||x2|]
(8)
(9)
(10)
因此,通过式(5)给出的w1(x2,x3)的形式,可以推导出w1(x2,x3)满足以下不等式:
可将上式归纳为:
|w1(x2,x3)|≤F1|x2|+F2
(11)
其中,F1和F2分别为如下形式:
2.2 变增益观测器设计
在观测器设计之前先进行变量变换,定义变量:
(12)
通过式(4)可以得到ξ1和ξ2的导数如下:
(13)
显然,ξ1可由x1计算得到。且可以通过估计ξ2实现对x2的估计。针对式(13)给出的系统,定义如下的观测器:
(14)
其中:k1和k2为观测器的静态增益,l为观测器的变增益系数,设计变增益系数的更新律为:
(15)


(16)
定义观测误差矢量e=[e1,e2]T,则式(16)可以表达为如下矢量形式:
(17)

(18)
其中:D=diag(1,2)。通过选择静态增益k1和k2可使A-KcT是Hurwitz的,因此存在正定矩阵P使得
(A-KcT)TP+P(A-KcT)≤-2d0I
(19)

(20)
针对式(20)的第二项存在如下不等式:
(21)
式中:
对于已知矩阵D和P,可以找到两个常数λ1和λ2满足不等式λ1I≤DP+PD≤λ2I。考虑到观测器变增益系数l的更新律(15),存在以下两种情况:

(22)
(23)
(24)
式中:a08=min{2(1+r2)d0,2ld0}。
2.3 鲁棒自适应动态面控制器设计
考虑到式(4)中的状态x2是不可测量的,因此将式(4)中x2用可以测量得到的信息代替,从而构建出如下全部状态信息均可得到的严反馈系统:
(25)
式中:
显然系统(25)中所有状态量均可获得,因此以下针对系统(25)展开状态反馈控制器设计,实现x1对hd的跟踪。采用动态面控制方法分步进行控制器设计。

(26)
依据式(26),设计名义虚拟控制量指令为:
(27)

(28)

(29)
依据式(29),设计名义虚拟控制量指令为:
(30)
其中:κ2>0为带设计反馈系数。同样地,定义如下一阶指令滤波器:
(31)


(32)
依据式(32),设计名义虚拟控制量指令为:
(33)
其中,κ3>0为待设计反馈系数。同样地,定义如下一阶指令滤波器:
(34)


(35)
其中,函数fal1(E11,λ1,ε1)定义为:
(36)
对s4求导可得:
(37)
设计最终的实际控制输入δe为:
(38)
3 稳定性分析
(39)
(40)
(41)
(42)

(43)
(44)
(45)
由式(39)~(42)及x1的定义可得:
(46)
(47)
(48)
其中:Di(i=2,3,4)为无穷次可微连续函数。由式(27),存在以下关系:
(49)
由δ2定义可得:
(50)
结合式(46),可以得出结论,存在函数χ2,满足如下不等式:
(51)
其中:χ2为无穷次可微连续函数。或者也可以写成如下形式:
(52)
(53)
(54)
(55)

(56)
(57)

(58)
其中:χ4为无穷次可微连续函数。
定理1.对于弹道倾角和攻角不可测量的高度子系统(4)~(6),虚拟控制指令为(27)、(30)、(33),以式(28)、(31)、(34)获得虚拟控制指令导数,实际控制输入为(38),以状态观测器(14)实现对弹道倾角信号的估计并间接实现对攻角的估计,观测器可变增益的更新律为式(15),通过合理选择控制增益、滤波器时间常数及观测器增益,即可实现整个闭环系统内的所有信号一致有界稳定,且可以通过设计参数的选取使得高度的跟踪误差收敛到0附近任意小的邻域内。
证.定义Lyapunov函数为:
(59)

(60)

δ2)+s2(c2s3+c2δ3-κ2s2-s1)+s3(s4-
κ3s3+δ4-c2s2)+s4(-κ4s4-Z12+w2-s3)+
(61)
由Young不等式,存在以下不等式关系:
(62)
(63)
(64)
(65)
(66)
将不等式组(62)~(66)代入式(61),可得:
(67)

(68)
由式(67)、(68)可得:
(69)

(70)

(71)
其中,


4 仿真校验
为了校验所提出的基于变增益观测器的输出反馈方法,采用式(1)~(2)中的非线性模型进行仿真分析。控制目标为实现对给定高度指令的跟踪,速度指令选择为保持当前速度不变。选定的高度指令为两次阶跃信号,两次分别实现5 km的阶跃。并将阶跃信号通过两个频率为0.3,阻尼为0.95的二阶环节。飞行器初始条件选择为V0=2347.6 m,h0=25908 m,γ0=0°。选取观测器增益k1=5,k2=6;控制器增益κ1=0.6+0.5l4,κ2=2.5,κ3=2.8,κ4=2.8;推力和气动耦合项的缩放的相关常数为a01=0.5,a02=1,a03=1;选择控制器设计步骤4中扩张状态观测器的常数为β11=10,β12=10,λ1=0.8,ε1=0.001。指令滤波器时间常数为T2=T3=T4=20。在此情况下,得到仿真结果如图2所示。

图2 高度跟踪及其跟踪误差曲线(标称情况)Fig.2 Curves of height tracking and its tracking error (nominal situation)
图2给出了高度跟踪及其跟踪误差。从图2可以看出,在本文所设计控制方案下,闭环系统对给定高度指令信号具有很好的跟踪精度,跟踪误差保持在很小的范围内。图3表明俯仰角信号实现了对指令值的精确跟踪。由于俯仰角和俯仰角速率均是可以直接测量得到的信号,且在第四步俯仰角速率q回路的控制设计时采用了等效干扰观测并补偿的方法,从而确保了俯仰角的跟踪效果。图4的升降舵摆角处于舵机所允许的合理范围内。

图3 俯仰角跟踪及其跟踪误差曲线(标称情况)Fig.3 Curves of pitch angle tracking and its tracking error (nominal situation)

图4 升降舵偏角曲线(标称情况)Fig.4 Curve of elevator deflection (nominal situation)

图5 ξ1,ξ2及弹道倾角估计曲线(标称情况)Fig.5 Estimated curves of ξ1,ξ2 and flight path angle (nominal situation)
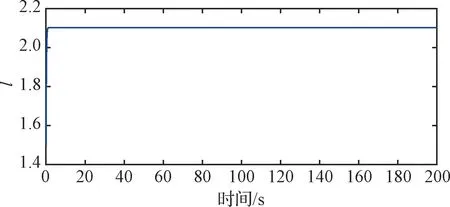
图6 可变增益l曲线(标称情况)Fig.6 Curve of variable gain l (nominal situation)
图5为观测器状态量ξ1,ξ2及弹道倾角的估计曲线,可以看出所提出的观测器可获得ξ1和ξ2的高精度估计值。ξ1和ξ2一起可构造出高精度弹道倾角估计信号。图6给出了可变增益l的曲线,l从初始时刻的1.5增加到2.1附近,收敛时间很短,且在增加到2.1后,变化幅度较小。可变增益l的变化幅度并不大,因此不会对弹性振动产生较大激励作用。

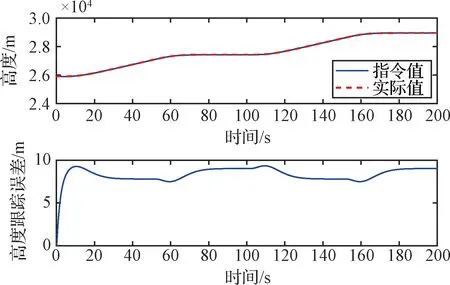
图7 高度跟踪及其跟踪误差曲线(不确定情况)Fig.7 Curves of height tracking and its tracking error (uncertain situation)

图8 俯仰角跟踪及其跟踪误差曲线(不确定情况)Fig.8 Curves of pitch angle tracking and its tracking error (uncertain situation)

图9 升降舵偏角曲线(不确定情况)Fig.9 Curve of elevator deflection (uncertain situation)
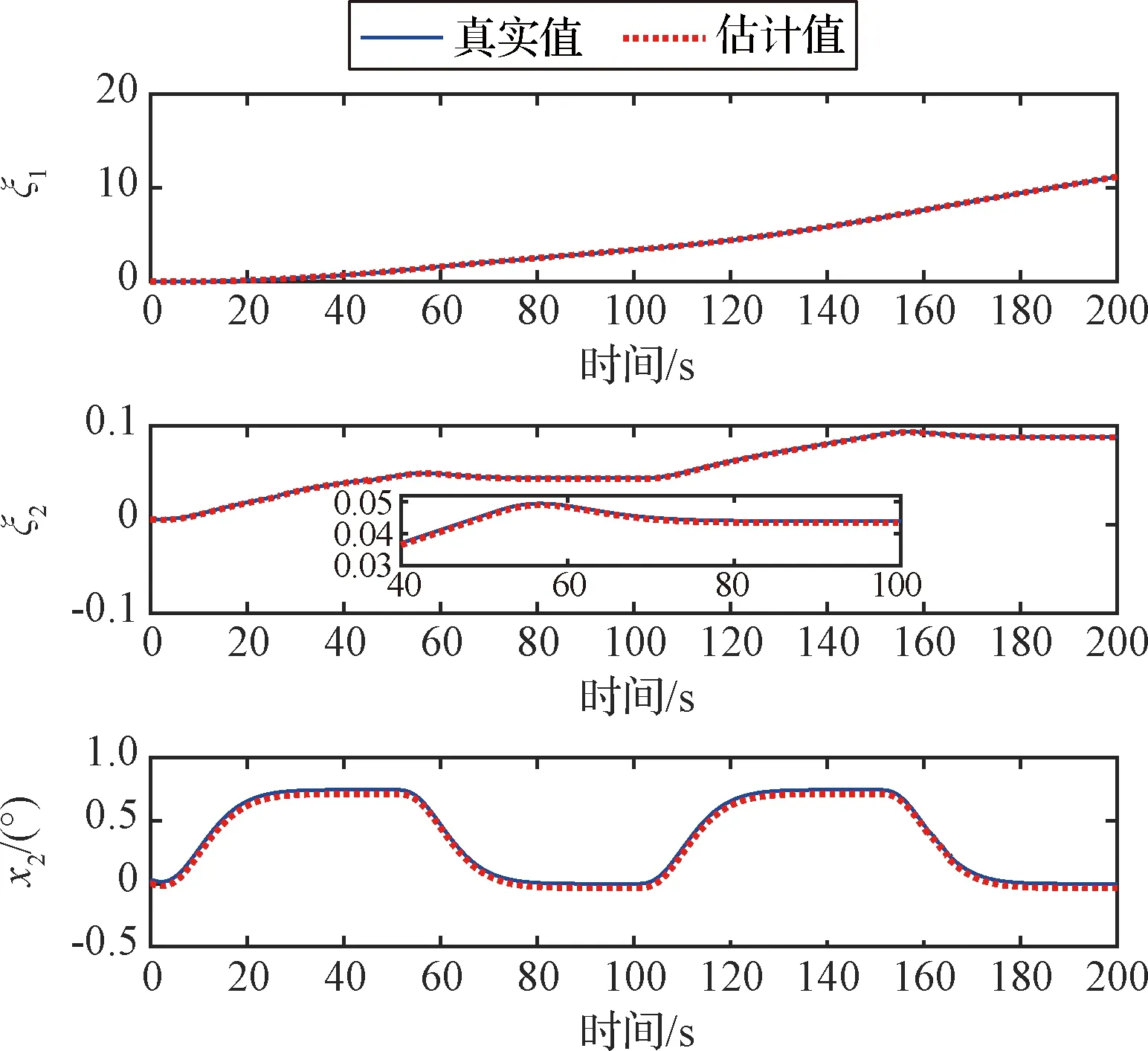
图10 ξ1,ξ2及弹道倾角估计曲线(不确定情况)Fig.10 Estimated curves of ξ1,ξ2 and flight path angle (uncertain situation)

图11 可变增益l曲线(不确定情况)Fig.11 Curve of variable gain l (uncertain situation)
图7为加入参数不确定以后的高度跟踪曲线及其跟踪误差曲线。从图7可以看出,本文所提出的基于变增益观测器的输出反馈控制方案具有较好的鲁棒性,在参数存在50%不确定,跟踪10 km的高度指令信号的情况下在整个时间段内的跟踪误差在10 m 以内。图8为俯仰角信号的跟踪及其跟踪误差曲线。存在较大参数不确定情况下的俯仰角信号的初始跟踪误差比不存在参数不确定的情况下大,但能够快速收敛到很小的范围内,跟踪精度很高。图9为升降舵控制摆角曲线,在整个仿真时间段内,升降舵偏角均在合理的范围内。
图10为考虑参数不确定情况下的观测器状态量ξ1,ξ2及弹道倾角信号的估计曲线。在存在不确定的情况下,ξ1的估计值仍能实现对真值的跟踪。ξ2与弹道倾角的估计精度略低于不存在不确定的情况,但是仍能实现很高精度的估计,估计误差很小。图11为可变增益l的曲线,变增益l的变化幅度也不大,不会对系统的未建模动态产生较大的影响。
综合不考虑参数不确定的名义情况的仿真和考虑参数不确定情况的仿真可以看出,本文所提出的变增益观测器对不可测量状态具有较好的估计性能,且鲁棒性较好,适应性强,且可变增益l的值在一个较小的范围内。整个控制方案具有较强鲁棒性能,可实现对于指令信号的高精度跟踪。
5 结 论
本文设计了一种基于变增益观测器的高超声速飞行器输出反馈控制方案。首先对气动和推力耦合项进行了分析,将耦合项的最大值表达为观测误差和可测量状态的形式。在观测器设计时,通过状态变换,获得了可观标准型形式的状态方程。并通过一个可变增益设计实现对耦合项中与观测误差项有关的部分的抑制。在获得观测值后,将实际系统的状态和观测器的状态重新组合成一个新的严反馈系统,采用动态面方法设计控制律。最后通过不同条件下的数值仿真校验了所提控制方案可实现对指令信号的精确跟踪,且具有较强鲁棒性。
猜你喜欢
火力与指挥控制(2022年6期)2022-07-25
小哥白尼(趣味科学)(2022年3期)2022-06-09
军民两用技术与产品(2022年2期)2022-06-01
凤凰动漫(军事大王)(2022年1期)2022-04-19
计算机仿真(2021年3期)2021-11-17
北京航空航天大学学报(2021年6期)2021-07-20
数字海洋与水下攻防(2020年5期)2021-01-04
北京航空航天大学学报(2020年10期)2020-11-14
航空发动机(2020年3期)2020-07-24
空气动力学学报(2019年5期)2019-12-31
