食指-拇指夹捏运动的动力学建模及控制
2019-05-30 01:10:52王婷
南京信息工程大学学报 2019年2期
关键词:动力学模型
王婷


摘要 本文研究了具有冗余肌肉的双自由度手指三维夹捏运动的运动学分析和动力学建模.拇指和食指均采用单关节肌和双关节肌模型,食指-拇指通过对向作用实现夹捏动作.在夹捏运动中,物体可以沿两个轴旋转,从而使物体实现时变的三维夹捏运动.考虑到屈肌和伸肌的共同收缩、非线性约束及重力的影响建立了动力学模型,并通过简单的控制对所提出的动力学模型的稳定性进行了数值仿真实验验证.
关键词 夹捏运动;单关节肌;双关节肌;动力学模型
中图分类号 R87;G804.6
文献标志码 A
0 引言
食指-拇指对向作用在人类发展史上起着非常重要的作用.基于解剖学、功能学和生理学研究,学者们得出结论,食指-拇指通过屈肌和伸肌的共同伸/缩模式产生对向作用可以实现精确的夹捏,即从指尖到指尖的夹捏运动[1].进一步的研究表明,除了固有的肌肉外,在夹捏运动过程中,食指和拇指都会用到附着在前臂上的肌肉以完成挤压动作,即冗余的肌肉会通过产生内力来调节关节空间的阻尼效应[2-3].为实现灵巧手能够模仿人手指的精确夹捏运动,研究具有冗余肌肉的拇指-食指的动力学模型具有十分重要的意义.
已有的研究大多围绕多指安全抓握运动的运动规划.学者们分析了在滚动接触中的多指运动学和动力学的相关问题,提出非完整约束可以通过指端和物体表面之间的滚动接触产生.为了实现稳定的夹捏运动,学者们研究了多指动力学与非完整约束之间的关系,以实现无摩擦接触的力/扭矩闭合[4-5].Bicchi[5]首先提出了一个用多自由度机械手指夹捏三维刚体的动力学模型.他设计了一个简单的finger-thumb opposition,以实现稳定的夹捏动作.Arimoto等[6]通过数值模拟验证得出了一个三维盲抓的动态模型.在他们的工作中,物体的瞬时旋转轴固定在二维空间中,而物体可以在三维空间中随时间变化而旋转[7-8].基于Arimoto等[6]的工作,本文着重考虑重力影响,采用Tahara的2自由度冗余肌肉模型,建立了食指-拇指夹捏三维刚体运动的动力学模型,分析了夹捏运动的稳定性,并通过简单控制进行了数值模拟仿真加以验证.
1 关节空间的手指运动学分析
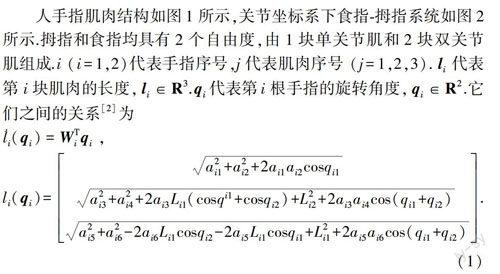
人手指肌肉结构如图1所示,关节坐标系下食指-拇指系统如图2所示.拇指和食指均具有2个自由度,由1块单关节肌和2块双关节肌组成.i (i=1,2)代表手指序号,j代表肌肉序号 (j=1,2,3).li代表第i块肌肉的长度,li∈R3.qi代表第i根手指的旋转角度,qi∈R2.它们之间的关系[2]为
式中,Lij和aik(k=1,…,6)分别代表手指长度和肌肉的插入点.WTi∈R3×2是从关节空间到肌肉空间的雅可比矩阵.通过虚功原理,关节力矩Ti∈R2与肌肉输出力Fi∈R3有如下关系:
Ti=WiFi.〖JY〗(2)
〖PSXX19220.eps,BP#〗
其中〖AKα-〗为肌肉的控制输入,l0是肌肉的自由长度,c是固有的阻尼参数,c>0,0 采用饱和函数设计控制输入〖AKα-〗i和〖AKα-〗i≥0,第i根手指的肌肉动力学方程可写为 fmi=pi〖AKα-〗i-pi(〖AKα-〗ici+c0i)〖AKl·〗i,〖JY〗(4) 其中〖AKα-〗i是一个半正定对角矩阵,c0,c0i,pi均为半正定矩阵. 2 三维物体夹捏运动的动力学建模 物体的体坐标系如图3所示,其中物体质心的位置用(x,y,z)T表示.假设刚性物体可以以角速度ωz和ωy分别绕Z轴和Y轴旋转.由于X轴的旋转运动很少发生,在此可以忽略[8].物体绕3个轴的瞬时旋转的位置矢量和质心的速度可以写成: R(t)=(ρx,ρy,ρz), R(t)∈SO(3), vt=(vx,vy,vz). 定义一个3×3的斜对称矩阵: 此外,假定指尖的形状为半径ri半球形(图3所示),不考虑的摩擦力,从物体质心到两个手指接触点的距离定义为di.半球形指末端的中心位置和接触点位置坐标分别表示为(x0i,y0i,z0i)和(X0i,Y0i,Z0i),i=1,2.指尖与刚体表面相关的约束如下: 手指端部与物体表面的接触点用球坐标φi,ηi,i=1,2表示.滚动约束写为 用矩阵Hi表示第i根手指的惯性矩阵,物体的质量用M表示,g是引力常数.基于哈密尔顿原理,利用动能、势能构建2自由度食指-拇指的拉格朗日方程为 图4和图5分别为食指-拇指夾捏运动过程中Y1-Y2和Z1-Z2的值.从仿真结果看出Y1-Y2→0,Z1-Z2→0,由此可以推论系统是稳定的.夹捏过程中的夹捏力fi(i=1,2)与期望的夹捏力fd如图6和图7所示,可以看出f1和f2均稳定地收敛到期望的夹捏力.夹捏运动过程中的滚动摩擦参数λY1,λY2,λZ1,λZ2分别如图8、9、10、11所示.由仿真结果可知,本文提出的动力学模型是稳定的. 4 结论 本文研究了食指-拇指夹捏物体的三维夹捏动力学模型.刚体可以绕Y轴和Z轴旋转,通过三维夹捏的运动分析,基于哈密尔顿原理和拉格朗日函数构建了三维夹捏的手指系统动力学模型和三维物体模型.手指-拇指系统采用一对具有滚动接触和冗余肌肉的2自由度连杆机构,在滚动约束和重力影响下分析了夹捏三维物体的运动,每个手指均具有屈肌和伸肌之间的收缩.通过控制信号进行了数值仿真,验证了所提出模型的收敛性.结果表明,本文所提出的动力学模型可以实现稳定的夹捏运动. 參考文献 References [1] Tahara K,Luo Z W.On dynamic control mechanisms of redundant human musculo-skeletal system[M]∥Tahara K,Luo Z W.eds.Advances in Robot Control.Berlin,Heidelberg:Springer Berlin Heidelberg,2006:217-247.DOI:10.1007/978-3-540-37347-6_11 [2] Tahara K,Luo Z W,Arimoto S,et al.Task-space feedback control for a two-link arm driven by six muscles with variable damping and elastic properties[C]∥Proc IEEE Int Conf Robot Autom,2005:224-229 [3] Mackenzie C L,Iberall T.The grasping hand[M].Amsterdam,Netherlands:North-Holland/Elsevier Science Publishers,1994 [4] Shimoga K B.Robot grasp synthesis algorithms:a survey[J].International Journal of Robotics Research,1996,15(2):230-266〖HJ1.6mm〗 [5] Bicchi A.Hands for dexterous manipulation and robust grasping:a difficult road toward simplicity[J].IEEE Transactions on Robotics and Automation,2000,16(6):652-662 [6] Arimoto S,Yoshida M,Ji-Hun B E.Dynamics and stability of blind grasping of a 3-dimensional object under non-holonomic constraints[J].International Journal of Automation and Computing,2006,3(3):263-270 [7] Arimoto S.Intelligent control of multi-fingered hands[J].Annual Reviews in Control,2004,28:75-85 [8] OzawaR,Arimo S,Nakamura S,et al.Control of an object with parallel surfaces by a pair of finger robots without object sensing[J].IEEE Transactions on Robotics,2005,21(5):965-976 Dynamics and stability of pinching movements by dual fingers with redundant muscles BHARATI Bimal1 WANG Ting1 1 School of Electrical Engineering and Control Science,Nanjing Tech University,Nanjing 211816 AbstractThis study investigates the dynamics of 3-dimensional pinching movements by dual two degree-of-freedom fingers with redundant muscles.The pinching movements are realized by the finger-thumb opposition.Both the thumb and index finger adopted the model with one monoarticular muscle and two biarticular muscles.During the pinching movements,the object may rotate along two axes so that it may achieve time-varying in 3-dimensional pinching.The dynamics and stability of the pinching movements are analyzed taking into account the co-contraction between the flexor and extensor muscles as well as the nonholonomic constraints.The numerical simulation is performed with a simple control signal to verify the effect of gravity. Key wordspinching movements;monoarticular muscles;biarticular muscles;dynamic model
猜你喜欢
中国新技术新产品(2017年5期)2017-03-20 18:29:25
科技视界(2016年27期)2017-03-14 23:09:34
内蒙古教育·职教版(2016年11期)2017-01-05 09:52:20
现代经济信息(2016年24期)2016-11-09 05:10:15
电脑知识与技术(2016年7期)2016-05-19 14:19:55
电脑知识与技术(2016年9期)2016-05-18 14:25:25
湖南大学学报·自然科学版(2016年2期)2016-03-15 23:01:05
企业导报(2015年16期)2015-12-14 09:56:59
湖北农业科学(2015年15期)2015-09-09 21:54:48
科技资讯(2015年4期)2015-07-02 17:55:56