基于Kinect的机器人辅助上肢被动康复训练控制方法
2019-05-30 10:48:04徐国政朱吉鸽
南京信息工程大学学报 2019年2期
关键词:虚拟环境
徐国政 朱吉鸽

摘要 现有基于Kinect构建的康复训练系统,大多以患者自行开展主动康复训练为主,未能充分利用康复医师的临床经验且很少用于机器人辅助康复训练系统,具有一定的局限.针对此問题,提出一种基于Kinect的机器人辅助上肢被动康复训练方法.首先,开展基于Kinect的上肢骨骼点跟踪与逆运动学计算;其次,基于Linux/QT及Kinect设计三维虚拟康复训练环境;再次,在康复医师示教训练任务并通过Kinect获取示教任务参考轨迹基础上,根据训练过程中Kinect实时捕获的患肢运动位置反馈,设计基于模糊推理的机器人辅助被动康复训练控制器;最后,基于Kinect及Barrett 公司4自由度WAMTM康复机器人构建试验统平台,对方法有效性进行试验验证.实验结果表明,所提方法能有效利用医师的临床康复经验,并使机器人较平稳地牵引受试者上肢沿示教任务轨迹进行训练,较好地实现了“医师—机器人—患者”之间的人机协同康复训练.
关键词 康复机器人;Kinect;被动训练;虚拟环境;任务示教;轨迹跟踪
中图分类号 TP242
文献标志码 A
0 引言
偏瘫初期患者病患部位肌张力增大,关节活动受限.为缓解肌痉挛并防止肌肉软组织硬化,患者偏瘫后必须尽快进行关节被动牵引训练.康复机器人技术是近年来发展起来的一种新的运动神经康复治疗技术[1].在机器人辅助患肢进行关节被动训练过程中,主要是由机器人在控制器作用下平稳地牵引患肢沿事先规划的运动轨迹进行康复训练[2].
研究表明,基于虚拟现实交互的机器人辅助康复训练方法,因其具有高度的逼真感和临场感,极大地提高了康复训练过程中患者的积极性和主动参与意识[3].近年来基于虚拟现实交互的机器人康复训练方法大多采用力/触觉反馈设备[3-4]或运动传感器[5]等来获取训练过程中的沉浸感.上述方法因交互设备价格昂贵或传感器穿戴不便,限制了其临床应用推广.此外,在机器人辅助康复训练过程中,实时获取患者运动位置信息,不仅可以实时评价患者康复训练效果,还可以据此设计位置反馈式康复训练控制器,以使康复机器人提供的牵引能更好地适应患者病情变化.现阶段临床大多采用尺子及量角器等传统量具进行测定[6],此方法只能在康复训练结束前后进行,不具备实时性,而且只能测定受试者具有较大变化的位置信息.
基于Kinect的体感交互,是近年来发展起来的一种新的无需借助任何控制设备、可直接使用肢体动作与数字设备及虚拟环境进行交互的技术,解决了现有虚拟交互过程中需要使用或佩戴复杂力触觉交互及运动捕捉设备的局限,且能够实时跟踪和捕捉运动过程中肢体的运动位置[7].文献[8]运用Kinect测量帕金森患者康复过程中肢体的运动时间和位置,通过与标准Vicon动作捕捉系统比较,验证了Kinect用于肢体运动时间和位置测量的准确性.文献[9]基于Kinect构建了一套居家康复训练系统,通过Kinect来捕获训练中患者的运动位置信息,以实时评估患者的康复训练效果.上述基于Kinect构建的康复训练系统,大多以患者自行开展主动康复训练为主,且较少用于康复机器人训练系统.
为充分发挥康复医师、机器人及Kinect体感交互技术在中风患者康复训练过程中的作用,本文提出了一种基于Kinect的机器人辅助上肢被动康复训练方法.首先,基于Kinect进行上肢骨骼点跟踪及逆运动学计算;其次,基于Kinect与Linux/QT设计三维虚拟康复训练环境;再次,基于Kinect获取康复医师示教训练任务参考轨迹及患肢实时运动位置,设计基于模糊逻辑的被动康复训练控制器;最后,基于Kinect及Barrett WAM柔顺机械臂构建机器人辅助康复训练系统,验证方法有效性.
1 方法
1.1 基于Kinect的上肢骨骼点跟踪与逆运动学计算
基于Kinect的上肢骨骼跟踪,是通过Kinect传感器实时捕获的人体深度图像并根据图1所示骨骼跟踪算法流程来实现的.首先通过Kinect获取的深度图像检测人体躯干,然后根据用户校准姿势(PSI)对人体姿态进行标定,待标定完成后即可对人体进行骨骼跟踪并实时计算各骨骼点数据.
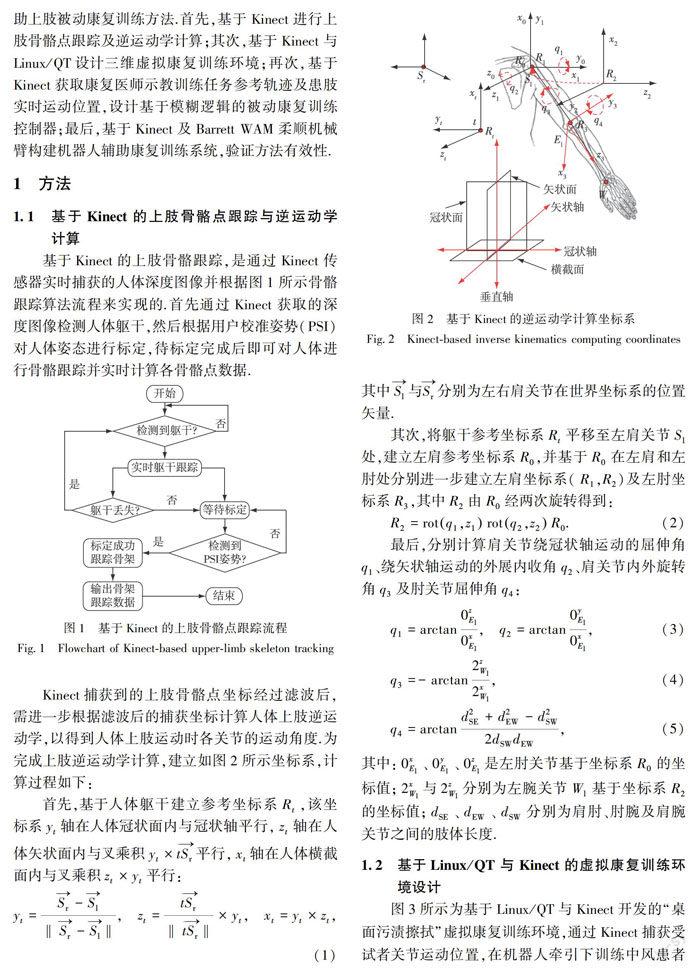
Kinect捕获到的上肢骨骼点坐标经过滤波后,需进一步根据滤波后的捕获坐标计算人体上肢逆运动学,以得到人体上肢运动时各关节的运动角度.为完成上肢逆运动学计算,建立如图2所示坐标系,计算过程如下:
首先,基于人体躯干建立参考坐标系Rt,该坐标系yt轴在人体冠状面内与冠状轴平行,zt轴在人体矢状面内与叉乘积yt×tSr平行,xt轴在人体横截面内与叉乘积zt×yt平行:
其中Sl与Sr分别为左右肩关节在世界坐标系的位置矢量.
其次,将躯干参考坐标系Rt平移至左肩关节Sl处,建立左肩参考坐标系R0,并基于R0在左肩和左肘处分别进一步建立左肩坐标系(R1,R2)及左肘坐标系R3,其中R2由R0经两次旋转得到:
最后,分别计算肩关节绕冠状轴运动的屈伸角q1、绕矢状轴运动的外展内收角q2、肩关节内外旋转角q3及肘关节屈伸角q4:
其中:0xEl、0yEl、0zEl是左肘关节基于坐标系R0的坐标值;2xWl与2zWl分别为左腕关节Wl基于坐标系R2的坐标值;dSE、dEW、dSW分别为肩肘、肘腕及肩腕关节之间的肢体长度.
在基于Kinect的机器人辅助上肢被动康复训练过程中,受试者在虚拟康复训练环境里进行桌面污渍擦拭动作(康复医师示教康复训练任务,中风患者在机器人牵引下实现被动擦拭训练),Kinect传感器捕获受试者手部腕关节三维空间坐标,并与虚拟环境中方块的位置坐标进行转换,进而实现受试者控制方块抹布对污渍的擦拭示教与训练.
1.3 基于Kinect的机器人辅助上肢被动康复训练控制方法
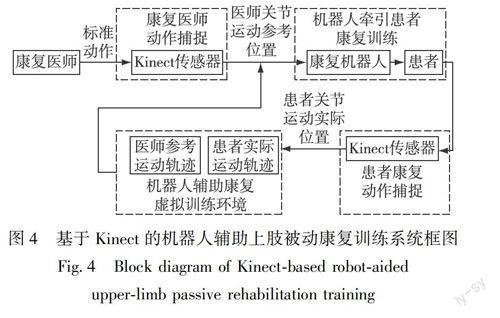
图4所示为基于Kinect的机器人辅助上肢被动康复训练控制系统框图.在机器人辅助上肢被动康复训练过程中,首先,康复医师在事先设计好的虚拟康复训练环境中,根据受试者上肢病情特征示教桌面污渍擦拭动作,同时运用Kinect传感器捕获康复医师在桌面污渍擦拭过程中肩与肘关节的运动位置,构建桌面污渍擦拭康复训练动作参考轨迹;其次,根据康复医师示教得到的训练动作参考轨迹,设计康复机器人被动训练控制器,使机器人平稳地牵引受试者上肢沿既定参考轨迹进行康复训练;最后,在机器人牵引受试者进行关节协调被动训练过程中,运用Kinect传感器捕获受试者肩、肘关节实际运动位置,并与康复医师示教参考轨迹进行比较,同时反馈轨迹跟踪误差至被动训练控制器.
在基于Kinect的机器人辅助被动康复训练过程中,为使机器人能平稳地牵引受试者上肢沿示教任务轨迹进行训练,本文在传统PID位置控制基础上,结合模糊推理构建了机器人辅助被动康复训练控制器,如图5所示.该控制器主要由“医师桌面污渍擦拭示教参考轨迹生成”、“模糊PID调节器”、“实时运动位置反馈”和“重力补偿”4个模块组成.“医师桌面污渍擦拭示教参考轨迹生成”模块主要是二次处理基于Kinect获取的医师示教任务参考轨迹,此处采用过路径点的抛物线过渡线性插值[10]方法进行平滑处理.“模糊PID调节器”模块分别为比例、积分和微分系数设计了独立的模糊调节器.在控制器设计过程中,选择关节位置跟踪误差θe及其误差变化θec作为模糊控制器输入,比例、积分和微分增益变化ΔKP、ΔKI和ΔKD作为相应调节器输出.“实时运动位置反馈”模块主要实时反馈机器人牵引被动训练过程中受试者的关节实际位置.“重力补偿”模块主要是用来对机器人本体、附在机器人末端的受试者上肢进行重力补偿.图6—7给出了模糊推理控制器输入和输出隶属度函数分布.
经过模糊化推理运算和重力补偿后,机器人关节驱动力矩可表示为
其中,KP,KI,KD,KP,KI及KD分别为传统PID控制器增益及相应的模糊调节器增益输出,M为机器人连杆及患肢质量和,g和Gscale分别为重力加速度和补偿系数.
2 实验装置
基于Kinect和Barrett公司WAMTMARM柔顺机械臂构建的机器人輔助上肢被动康复训练系统,如图8所示.该系统主要由Kinect深度传感器、Barrett公司4自由度柔顺机械臂WAMTM、球形辅助操纵装置及基于Linux/QT与Kinect构建的三维虚拟康复训练环境组成.在基于Kinect的机器人辅助上肢被动康复训练系统中,深度传感器Kinect用来捕获受试者肩、肘及腕部关节运动位置,主要由红外发射器、RGB摄像头及红外摄像头组成.WAMTM是一款高性能、可反馈驱动的灵巧型机械臂,主要有4自由度和7自由度2种配置,该机器人系统具有基于Ubuntu Linux及Xenomai实时模块开发的高度开放软件,用户可以在此平台上进行高级控制算法的实验验证[11].基于Linux/QT与Kinect开发的“桌面污渍擦拭”虚拟康复训练环境(详见1.2节),除用来获取康复医师的示教训练任务参考轨迹外,主要用于机器人辅助上肢被动康复训练过程中受试者与虚拟康复训练任务的实时交互.
3 实验结果与分析
为验证本文所提基于Kinect的机器人辅助上肢被动康复训练方法的有效性及临床适用性,选取1例健康受试者,分别在人体水平面和矢状面内规划桌面污渍擦拭动作,以验证机器人在被动训练控制器作用下,牵引受试者沿康复医师示教轨迹进行训练时肩、肘关节的轨迹跟踪性能.水平和矢状面内桌面污渍擦拭训练时传统PID控制器比例、积分及微分增益分别设置为KP=625水平/715(矢状)、KI=35水平/15(矢状)及KD=12水平/15(矢状).模糊PID调节器增益变化范围设置如图7所示.考虑患肢训练安全及WAM机器人钢绳承载能力,机器人末端运行最大速度、各关节电机最大绝对输出力矩分别设置为1.2 rad/s和8 191.
根据康复医师示教的桌面污渍擦拭任务,图9—10分别给出了在水平和矢状面内进行机器人牵引被动训练时受试者肩、肘关节的轨迹跟踪曲线及机器人相应关节的力矩变化.分析水平和矢状面内关节运动位置控制(图9a、9b与图10a、10b)和机器人力矩变化(图9c与图10c)结果可知:
首先,基于Kinect获取的康复医师示教任务轨迹经插值平滑处理后(过路径点的抛物线过渡线性插值),能较好地应用于机器人辅助被动康复训练.
其次,在机器人牵引受试者进行桌面污渍擦拭被动训练过程中,模糊与传统PID位置控制器虽不同程度地存在跟踪误差,但未出现明突变或显偏离的轨迹跟踪,二者均能较好地控制机器人牵引受试者进行关节被动跟踪训练.
再次,传统PID位置控制器虽能跟踪医师示教参考轨迹变化趋势,但与模糊PID位置控制器跟踪性能相比,明显具有较大的跟踪误差;二者轨迹跟踪误差计算结果表明(单位:(°)),在水平面内,传统PID控制器作用下肩、肘关节的跟踪误差均值分别为4.21±5.12与3.05±2.01,相应地,模糊PID控制器对肩、肘关节的跟踪误差均值分别为1.18±2.14与1.58±0.74;在矢状面内,传统PID位置控制器对肩、肘关节的跟踪误差均值分别为2.63±2.41与0.58±1.45,模糊PID控制器作用下肩、肘关节的跟踪误差均值分别为0.87±1.01与0.45±1.76.根据跟踪误差计算结果可知,矢状面内进行桌面污渍擦拭训练的轨迹跟踪误差要小于水平面内的相应误差.
最后,从各自关节力矩变化情况可以看出,由于受试者肢体肌力的影响,传统PID控制方法同模糊PID控制方法相比,前者在控制机器人牵引受试者进行被动跟踪过程中存在一定的颤动和较大的力矩超调,而后者均能保持较平稳的力矩控制.
猜你喜欢
包装工程(2023年16期)2023-08-25 11:32:42
载人航天(2021年5期)2021-11-20 06:04:34
广东教育·职教版(2021年7期)2021-08-23 04:20:50
科技创新导报(2017年27期)2017-11-28 13:10:58
卷宗(2017年11期)2017-07-19 13:52:49
商情(2017年22期)2017-07-18 11:16:30
计算机测量与控制(2017年6期)2017-07-01 16:23:22
艺海(2016年12期)2017-01-13 07:50:57
科技视界(2016年11期)2016-05-23 11:28:14
科技与创新(2016年8期)2016-05-05 09:19:15