
全程多约束条件下火箭弹最优轨迹设计及跟踪*
2019-05-28 03:22李佳星温求遒夏群利
弹箭与制导学报 2019年5期
李佳星,温求遒,夏群利
(北京理工大学宇航学院,北京 100081)
0 引言
随着对远程精确打击火力的需求日益增加,提高火箭弹的射程和精确打击能力已经成为火箭弹研究的重要方向[1]。最优轨迹设计能够在多约束条件下,实现火箭弹射程的提高[2]。伪谱法是解决最优控制问题的最有效果的方法之一[3]。通过伪谱法得到最优弹道,再设计制导律实现最优轨迹的跟踪,使火箭弹能够在复杂环境下进行远程精确打击,已有学者在相关技术方面进行了研究。汤善同等针对远程防空导弹,研究了中制导段的弹道优化及制导问题[4];夏红伟等研究了飞行器再入段的弹道优化与伪谱法的反馈制导方法[5];张大元等针对防空导弹弹道跟踪问题,基于线性二次型调节器(LQR)理论设计了弹道跟踪制导律[6]。
文中针对火箭弹,以射程最远为性能指标,在全程多约束条件下进行了最优轨迹设计,然后基于线性二次型调节器设计跟踪制导律,实现了最优轨迹的多变量跟踪,最后通过仿真进行了验证。
1 制导火箭弹运动模型的建立
文中的研究对象为一种正常式布局的火箭弹,其飞行过程分为主动段和被动段,工作及控制过程如下:在接收到点火指令后,火箭发动机工作,火箭弹以固定的射角发射,进入到具有发动机推力作用的主动段。火箭发动机工作结束后,火箭弹进入被动段,做无动力飞行,在制导控制系统作用下,制导指令转换为舵指令,通过舵片偏转使火箭弹命中目标。为研究方便,假设地球表面为平面,不考虑地球自转,将舵片偏转的作用等效成攻角,建立火箭弹纵向运动方程组:
(1)
式中:V为火箭弹飞行速度,θ为弹道倾角,x为射程,y为高度,P为发动机推力,α为飞行攻角,D、L分别为空气阻力和升力,其计算方法为D=cxρV2s/2,L=cyρV2s/2,s为弹体特征面积,ρ为大气密度,其数值可通过参考文献[7]获得。cx和cy为阻力系数和升力系数,它们是攻角和马赫数的函数,可以通过下式计算得到:
(2)
式中:f(Ma,α)和g(Ma,α)是自变量为马赫数和攻角的拟合函数。
2 优化模型的建立及求解
2.1 优化模型的建立
为了求解最优控制问题,应先建立优化模型[8]。
1)状态方程:即为式(1),其中V、θ、x和y为状态变量,攻角α为控制变量。
2)初始条件:V=V0、θ=θ0、x=x0及y=y0
3)边界条件:需满足下列边界条件:
(3)
4)控制约束:αmin≤α≤αmax
5)终端约束:V=Vf、θ=θf、x=xf及y=yf
6)性能指标函数:
(4)
式中:x(t)∈Rn为状态变量,u(t)∈Rm为控制变量,t0为初始时间,tf为终端时间,Φ(x)为Mayer型代价函数;g(x)为Lagrange型代价函数。
2.2 优化问题求解
将优化问题看成最优控制问题,并寻找控制变量,使得具有一般性的Bolza型性能指标函数即式(4)最小,并满足以下约束:
1)系统动力学微分方程约束
(5)
2)终端边界约束
φ(x(t0),x(tf),t0,tf)=0
(6)
3)不等式路径约束
C(x(t),u(t),t)≤0
(7)
对最优控制问题采用伪谱法将Bolza型问题转化为非线性规划问题。首先将全程时间区间[t0,tf]划分为K个网格子区间[tk-1,tk],k=1,…,K。将每个网格子区间的时域t∈[tk-1,tk]转变为τ∈[-1,+1],即:
(8)
然后将每个网格子区间[tk-1,tk]内的状态变量和控制变量离散化,并构建多项式来逼近状态变量和控制变量,得到近似方程式:
状态变量x(k)(τ)可近似为:
(9)
控制变量u(k)(τ)可以近似为:
(10)
式中:Nk为区间[tk-1,tk]内的配点数,Li(τ)及Lj(τ)Lagrange插值多项式,即:
对近似状态方程式(9)求微分,将Nk个配点上的动力学微分方程约束变为代数方程约束,即:

(12)

每个子区间内的Nk个配点上的路径不等式约束为:

(13)
式中,i=1,…,Nk;k=1,…,K。
边界条件为:
(14)
将Bolza型性能指标函数式(4)中的积分项近似为:
(15)

(16)
通过上述方法,求得每段配点处的状态变量和控制变量,在满足各种约束的情况下使得性能目标函数最小。这种非线性规划问题能够通过序列二次规划算法(SQP)进行求解。
3 基于LQR的跟踪制导律设计
上一节研究了火箭弹最优轨迹设计方法,求得了全程多约束条件下的最优弹道。但是火箭弹在飞行过程中受多种偏差影响,文中采用线性二次型调节控制方法,设计闭环制导律对最优弹道进行跟踪,首先要将运动学方程线性化。
3.1 线性化模型
小扰动假设条件下,以时间为自变量,选取y、V和θ作为反馈跟踪量进行设计,即:
(17)

(18)

其中,Dy、DV、Ly、LV、Dα、Lα分别为阻力、升力加速度的偏导数,有:
其中气动力系数导数由以下计算方法得到,即:
3.2 基于LQR的跟踪制导律
(19)
式中:Q和R为状态向量和控制向量的加权矩阵。为了让性能指标J的值最小,控制量应符合[9]:
u*(t)=-R-1(t)BT(t)P(t)x(t)=-K(t)x(t)
(20)
则:
δu=δα=-R-1BTPδx(t)=-Kδx
(21)
式中:P是Riccati方程PA+ATP-PBR-1BTP+Q=0的解,K=(K1,K2,K3)为增益向量。进一步求得实际控制量:
αc=αref+δα=αref-K1δy-K2δV-K3δθ
(22)
式中αref为最优轨迹的攻角指令。
在最优弹道上选取多个特征点,分别求得反馈增益参数,预先装订成反馈增益向量。对于火箭弹,在飞行全过程中可根据实时的动压,通过插值得到反馈增益系数。
4 仿真分析
4.1 火箭弹弹道优化
文中研究的火箭弹飞行任务,为了使火箭弹具有较大的射程,故以射程作为最优指标,该弹道优化问题可表述为:
1)状态方程:即为式(1)。火箭发动机在0~25 s内工作,P=39 kN,假设质量均匀变化。特征面积s=0.282 6 m2,气动力系数如下列拟合函数计算:
2)初始条件:V=20 m/s、θ为待优化量,范围[20°,80°]、x=0和y=0。
3)边界条件:需满足下列条件:
4)控制约束:-18°≤α≤18°
5)终端约束:θ=-70°、y=0和|αt|≤3°。
6)性能指标函数:J=-xtf
仿真结果如图1和图2所示。

图1 优化前后弹道对比图
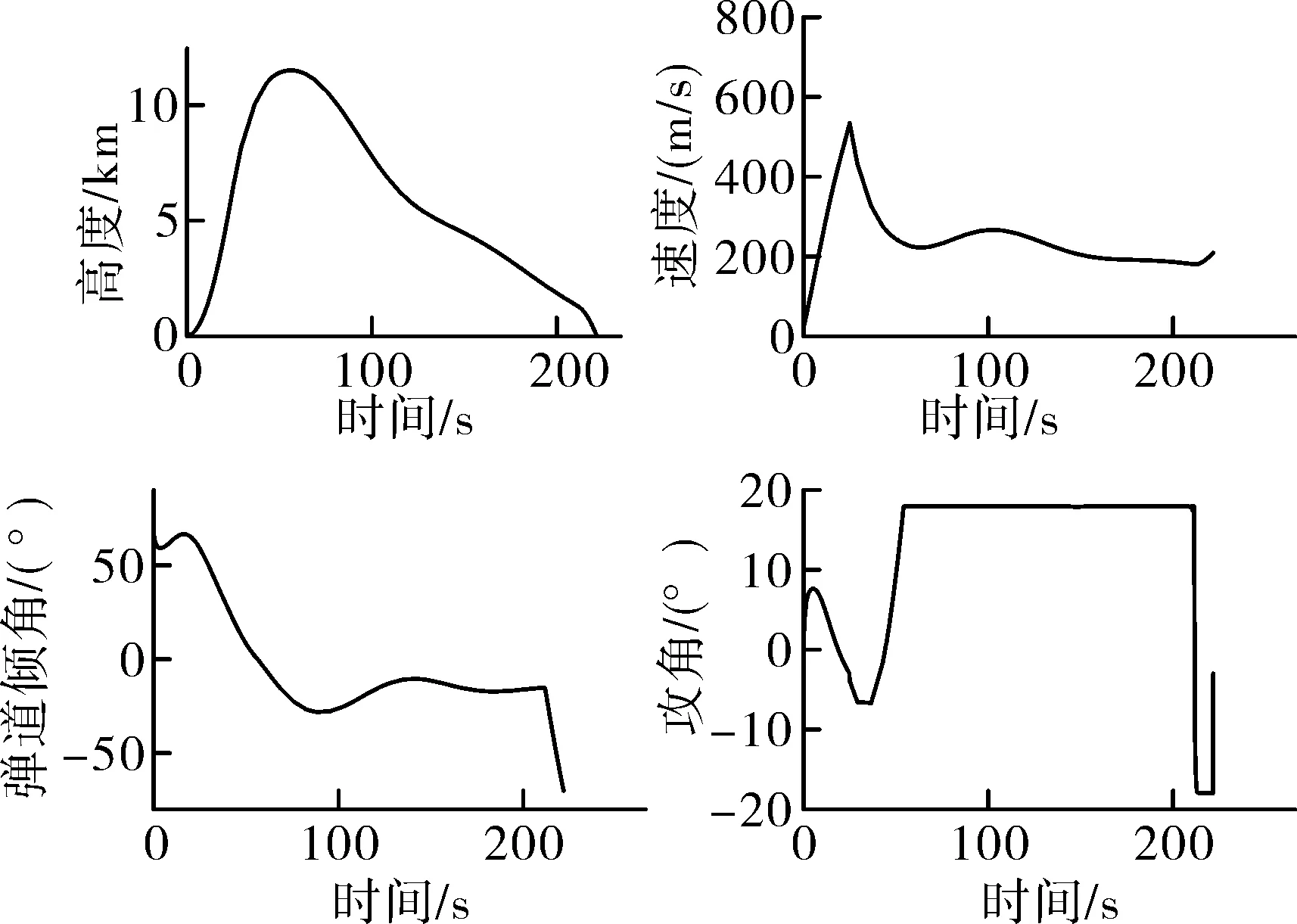
图2 最优轨迹对应状态量变化曲线
由仿真结果可得:优化方案达到了增大射程的目的,火箭弹在大部分时间保持正极限攻角飞行,最终射程为45.26 km,末端攻角为-2.99°。
4.2 火箭弹跟踪制导
选取制导律权重系数矩阵为:Q=diag(1,1,1),R=1。
仿真中,加入拉偏项,即密度+5%,阻力系数+5%,升力系数+5%,并加入开环制导作为对比,即将αref直接作为制导指令,仿真结果如图3~图6所示。
以上结果表明:开环制导虽然能使跟踪弹道的攻角指令与最优弹道保持一致,但是在存在微小扰动的情况下,跟踪弹道的高度、速度和弹道倾角已经产生明显偏差,其中跟踪高度已经偏离最优弹道超过200 m,而LQR跟踪制导实现了对最优弹道的跟踪和逼近,高度、速度、攻角和弹道倾角等与最优弹道十分接近,基本实现了多变量的跟踪。

图3 弹道曲线
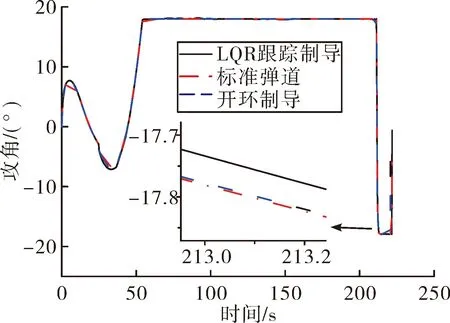
图4 攻角曲线
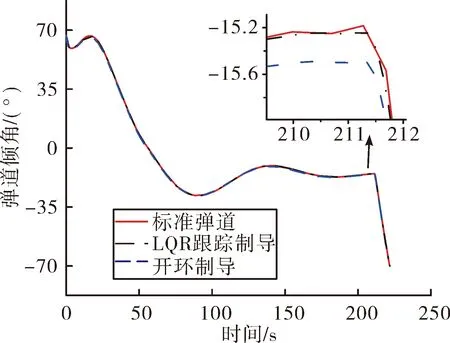
图5 弹道倾角曲线

图6 速度曲线
5 结论
对火箭弹进行了最优轨迹设计与跟踪制导方法的研究,根据任务特点设定射程最大为优化目标,并采用伪谱法得到满足全程多约束的最优弹道。将火箭弹运动方程关于最优弹道线性化后,基于LQR设计了跟踪制导律,实现了多变量的跟踪。并通过仿真验证了该制导方法的可行性和优越性。
猜你喜欢
小哥白尼(趣味科学)(2022年3期)2022-06-09
数字海洋与水下攻防(2020年5期)2021-01-04
空气动力学学报(2019年5期)2019-12-31
宇航总体技术(2019年5期)2019-10-11
电子制作(2019年7期)2019-04-25
汽车零部件(2018年8期)2018-09-06
计算机辅助工程(2014年2期)2014-07-21
