
高地隙植保机喷杆自动控制装置研制
2019-05-27 08:47刘岗微金诚谦
农机化研究 2019年10期
印 祥,俞 康,刘岗微,杜 娟,金诚谦,2
(1.山东理工大学,山东 淄博 255000;2.农业农村部 南京农业机械化研究所,南京 210014)
0 引言
高地隙植保机作为一类自走式农业机械,具有高地隙底盘和宽幅喷雾喷杆,适用于大田作物的病虫害防治和叶面肥喷施。由于存在雾滴飘移现象,在实际作业过程中要求作业人员穿戴防护用具以避免农药中毒[1-4]。在农作物病虫害发生的季节,往往温度较高,作业环境恶劣,而采用远程操作和自主作业等方式能够使操作人员远离作业现场、减少农药中毒等作业风险[5-7]。
随着农业装备自动化和智能化水平的不断提高,农田车辆如联合收获机、高速插秧机、拖拉机等的自动导航和智能控制得以实现[8-10],而实现农田车辆智能控制的前提是农田车辆的自动操作和作业机具的自动控制[11]。对于高地隙植保机而言,要求其具备自动转向、速度自动控制、喷杆自动调节及喷雾自动调节等基本功能。
本文针对高地隙植保机的喷杆自动控制,在保留雷沃ARBOS高地隙植保机手动喷杆控制功能的前提下,研制了具备串口通信功能的喷杆自动控制装置。该装置能够接收遥控器发出的操作指令,控制电动推杆的伸缩以完成左右喷杆的伸展和喷杆高度的调节,同时控制液泵动力的通断。
1 系统构成
以雷沃ARBOS高地隙植保机为试验平台,结合其喷药系统操作机构和功能特点,研制了喷杆自动控制装置,如图1所示。该装置主要包括自动控制单元、继电器模组、遥控器与接收机及数据处理单元等。数据处理单元用以接收遥控器发出的控制信号,对数据进行处理后通过串口将控制指令发送至电子控制单元;电子控制单元接收和解析控制指令,向继电器模组发送控制信号以控制工作电机的正反转和电磁离合器的吸合,从而实现喷杆的伸展和高度调节及液泵的起停。

图1 控制装置构成
2 硬件系统设计
2.1 继电器模组
雷沃ARBOS高地隙植保机喷杆控制执行机构主要包括左侧推杆、右侧推杆、升降推杆、升降机构及用于控制液泵工作的电磁离合器,如图2所示。

图2 高地隙植保机
其中,左侧推杆和右侧推杆分别用以左右喷杆的收纳和伸展;升降推杆和升降机构用于调节喷杆的作业高度;电磁离合器用于控制液泵的动力通断。工作时,通过操作双刀双掷开关控制推杆电机的正反转以实现推杆的伸缩。手动控制电路原理如图3所示。

图3 手动控制电路原理图
基于上述喷杆控制原理,在原有控制电路的基础上,采用并联继电器模组的方法,以实现推杆电机和电磁离合器的自动控制,并保留喷杆的手动操作功能。基于继电器模组的喷杆自动控制电路如图4所示。每个电动推杆的伸缩由两组继电器控制,推杆电机的两端均连接公共端,继电器的常开端和常闭端通过保险片分别连接电源正极和电源地。继电器控制端IN+连接自动控制单元的数字I/O口及IN-连接信号地,通过IN+端高/低电平的设定,可控制推杆电机的正反转,从而实现电动推杆的自动控制。

图4 自动控制电路原理图
2.2 数据处理单元
选用Arduino DUE开发板作为数据处理单元,接收并处理遥控器发出的操作信号,如图5所示。采用六通道遥控器,其中的5个通道分别用以控制高地隙植保机的前进/停止/后退、油门大小、喷杆的收纳和伸展、喷杆的升降、电磁离合器的动力通断。因此,喷杆和液泵的遥控操作需占用3个通道,将接收机对应输出的3路PWM信号分别接至数据处理单元的数字I/O口:22、23和24。数据处理单元通过数字I/O口计算PWM信号占空比,根据占空比大小判断喷杆的收纳/伸展、喷杆的升降及液泵动力的通断等操作,并将操作指令数据打包后通过串口发送至自动控制单元。

图5 数据处理单元
数字I/O引脚接收到的PWM信号占空比S的范围是(700,1 200)。当S>1 000或S<900时,分别对应喷杆的收纳和伸展、喷杆的上升和下降、电磁离合器的接通和断开。
2.3 自动控制单元
自动控制单元是喷杆自动控制的核心,用以读取和解析操作指令,向继电器模组发送控制信号。根据喷杆自动控制系统的功能要求,以Microchip公司的PIC18F458单片机为中央处理器,设计并制作了如图6所示的自动控制单元。

图6 自动控制单元
自动控制单元根据串口接收到的控制指令,通过数字I/O口D0-D7向继电器模组控制端发送高/低电平信号,以控制推杆电机的正反转和电磁离合器的吸合。
3 软件系统设计
3.1 喷杆控制方法
当喷杆伸展时,自动控制单元从引脚D0和D1分别发出高电平和低电平信号、从引脚D2和D3分别发出高电平和低电平信号,使两侧的推杆电机正转将推杆伸出,同时打开左右喷杆。
当喷杆收纳时,自动控制单元从引脚D0和D1分别发出低电平和高电平信号、从引脚D2和D3分别发出低电平和高电平信号,使两侧的推杆电机反转将推杆收缩,同时收纳左右喷杆。
喷杆的升降通过调节推杆电机的伸出长度来实现,而推杆电机的伸缩需要根据操作指令实时控制。喷杆升高时,自动控制单元从引脚D4和D5分别发出高电平和低电平信号,使推杆电机正转将推杆伸出,借助平行四边形升降机构将喷杆提升;喷杆降低时,自动控制单元从引脚D4和D5分别发出低电平和高电平信号,使推杆电机反转将喷杆降低。
电磁离合器受控于电流的通断,当需要其吸合时,自动控制单元从引脚D6发出高电平信号,使电磁离合器控制电流接通,电磁离合器吸合,从而将动力传递至液泵。
3.2 软件设计
根据喷杆控制系统硬件电路、信号传输形式、喷杆动作要求及执行机构特点等,制定了系统的工作流程,如图7所示。系统初始化后,数据处理单元接收遥控信号,进行信号处理后通过串口发送操作指令;自动控制单元根据接收到的操作指令,控制继电器模组输入控制端口的高/低电平,改变推杆电机的电流方向,从而实现各推杆电机的正反转。
根据图7所示的工作流程,利用Arduino开发环境和MPLAB IDE开发环境分别开发了数据处理单元程序和自动控制单元程序,并在仿真测试的基础上完成了电路板设计制作和元器件的安装调试。

图7 控制系统工作流程图
4 试验测试与结果分析
将所研制的喷杆自动控制装置集成到雷沃ARBOS高地隙植保机上,在山东理工大学图书馆南侧进行了田间试验测试,对该装置的工作性能进行评价。
4.1 喷杆的收纳和伸展
在喷杆完全收纳的状态下,操作遥控器向喷杆自动控制装置发出喷杆伸展指令,并用秒表记录遥控器指令发出与喷杆达到完全伸展状态之间的时间间隔。同样地,在喷杆完全伸展的状态下,用秒表记录从遥控器指令发出到喷杆完全收纳所需的时间。上述过程重复5次,所得试验数据如表1所示。
喷杆从收纳状态到完全伸展所需的平均时间为5.49s,从伸展状态到完全收纳所需的平均时间为6.27s。收纳时,电动推杆需要克服两侧喷杆的重力,与伸展时相比负载较大,因此所需时间较长。

表1 喷杆的收纳和伸展时间
4.2 喷杆的高度调节
在喷杆的高度调节试验中,采用日本北洋公司的UTM-30LX型激光测距仪测量喷杆的离地高度并输出高度数据,其数据输出频率为10Hz,用秒表记录喷杆从最高点到最低点所需的时间。
将激光测距仪安装于喷杆的中心位置,用笔记本电脑记录其输出数据。在喷杆处于最低位置时,操作遥控器发出喷杆上升指令,上升过程中所记录的高度数据如图8所示。由图8可知:喷杆的最大离地间隙和最小离地间隙分别为1.48m和0.48m。
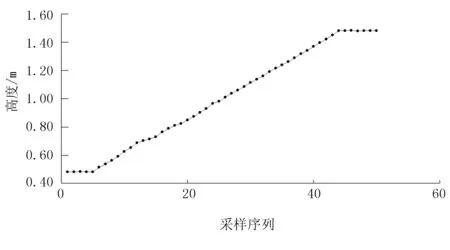
图8 喷杆高度
同时,用秒表记录遥控器指令发出后喷杆到达最高位置所需的时间和喷杆到达最低位置所需的时间,试验重复5次,所记录的时间数据如表2所示。

表2 喷杆的上升和下降时间
喷杆从最低位置到达最高位置所需平均时间为4.03s,从最高位置到达最低位置所需平均时间为3.70s。喷杆上升时,电动推杆需要克服喷杆重力,其负载较大,因此与下降时间相比上升所需时间较长。
试验结果显示:所研制的喷杆自动控制装置能够接收遥控器的操作指令,完成喷杆的收纳和伸展、喷洒高度调节及液泵的动力通断等功能的自动控制,具备良好的控制稳定性和可靠性,能够满足高地隙植保机自动控制的基本要求。
5 结论
1)研制了高地隙植保机喷杆自动控制系统与装置,能够通过串口接收操作指令自动完成喷杆的伸展和收纳、喷杆的高度调节、液泵的起停。
2)在保留喷杆手动控制功能的前提下,采用继电器模组控制推杆电机的正反转,模组控制端连接自动控制单元的数字I/O口,实现了执行元件的自动控制。
3)田间测试表明:该装置能够正确接收遥控器发出的操作指令,完成左右喷杆的同步动作和高度的实时调节,具备良好的可靠性,能够满足高地隙植保机自动控制的基本要求。
4)自动控制单元能够通过串口接收其它控制装置的操作指令,为高地隙植保机自动导航、自主作业等智能控制系统的开发提供了一定的技术支撑。
猜你喜欢
再生资源与循环经济(2022年8期)2023-01-06
宝钢技术(2022年4期)2022-12-23
农业装备与车辆工程(2022年5期)2022-10-31
中国农机化学报(2022年8期)2022-08-12
农业机械学报(2022年2期)2022-03-14
起重运输机械(2021年3期)2021-03-27
林业机械与木工设备(2021年2期)2021-03-11
兵器装备工程学报(2020年12期)2021-01-12
科学与财富(2019年7期)2019-10-21
汽车维修技师(2018年7期)2018-12-07
