
超声马达单神经元自适应PID控制
2019-05-27 06:11:22尤向阳
微电机 2019年4期
尤向阳
(1.河南科技大学 应用工程学院,河南 三门峡 472000;2.三门峡职业技术学院,河南 三门峡 472000)
0 引 言
超声马达的运动特性具有较强的非线性和时变性[1],很难用较为精确的传递函数来描述其转速与输入电压之间的关系。传统的PID控制器虽然参数整定与工程指标联系密切,方便调整,但是对被控对象的数学模型要求较高,难以实现对超声马达的有效控制[2-3]。为了提高超声马达运动控制系统性能,本论文在常规PID控制规律下,利用神经元PID进行控制参数调整,控制系统设计不再需要对超声马达进行精确的数学建模。
单神经元神经网络是一种结构简单、易于实现的神经网络,并且可以实现自学习和自适应[4]。本文采用单神经元自适应PID控制算法,把常规PID控制策略和神经网络控制策略结合起来,该方法克服了常规PID控制器难以在线进行参数整定的不足,实现了对超声马达这种复杂控制对象的有效控制[5-6]。
1 单神经元自适应控制PID结构
传统增量式PI调节器的算法为
u(k)=u(k-1)+Kp[e(k)-e(k-1)]+KIe(k)
(1)
式中,Kp和KI为比例系数和积分常数。
常规PID控制器的参数通常是按照控制对象的特性和系统控制的要求预先整定好的,当被控对象在运行过程中收到内外部各种干扰因素影响时而发生变化时,通常不易对被控对象参数进行在线修正,很难满足实时控制的需求[7-8]。神经元的自学习能力使得神经网络能够按照控制对象特性的变化实时进行神经元权值的调整,使控制器实现自适应控制功能。单神经元神经网络结构简单,采用自适应算法即可做到PID控制器参数随被控对象特性的改变而实时调整,实现高性能控制。

图1 超声马达单神经元PID自适应控制系统结构
超声马达单神经元自适应PID神经网络控制结构框图如图1所示。其中,yr(k)为控制器的设定值,y(k)为输出值,x1(k),x2(k),x3(k)为状态变量,w1(k),w2(k),w3(k)为权值系数,K为增益,u(k)为控制变量。图中状态变换环节由式(2)计算,控制变量的计算由式(3)和式(4)给出
(2)
(3)
(4)
权值系数wi(k)可根据不同的学习规则进行调整。采用有监督Hebb算法进行自学习的单神经元PID权值调整学习算法[8]:
(5)
式中,ηI、ηP、ηD分别为积分项、比例项和微分项的学习速率,e(k)=x1(k)=yr(k)-(k)为递进信号。
2 单神经元PID自适应控制算法
单神经元PID自适应控制的算法流程图如图2所示。

图2 控制算法流图
单神经元控制算法以占空比为控制变量进行设计,实现单神经元PID自适应控制。PID各环节学习速率的设置需在试验过程中进行确定[8-9],确定步骤如下:
(1)ηI的确定方法
先按经验值初步选定一个ηI值进行试验。当系统达到稳态运行时,检测超声马达的转速,如果转速波动过大,可以适当减小ηI数值;如果系统对设定转速的响应比较缓慢,则应适当加大ηI的取值。按此方法多次调整ηI数值,并检测电机运行速度,记录电机转速曲线,比较不同ηI取值下电机转速的动态和静态性能选取一个相对最优ηI=0.053。
(2)ηP的确定方法
ηI值确定下来以后,依然先根据经验初步设置ηP的数值。然后进行实验,观察系统在阶跃信号作用下的动态响应过程,如果超调量过大甚至出现震荡时,可适当减小ηP值;如果对于给定转速的阶跃上升时间过大,可以通过适当加大ηP值。按此方法多次调整ηP数值,并检测电机运行速度,记录电机转速曲线,选取电机转速响应性能相对最优的ηP=0.24。
(3)ηD的确定方法
在ηI和ηP确定的情况下,先按照经验值进行试验。观察在加入微分调节项以后系统的稳态性能指标及动态性能指标是否有所提高。适当增加或者减小ηD值,进行多次试验,选择系统静态与动态性能指标最优情况下的ηD值,本试验最终确定的微分项学习速率ηD=0.45。
以低频PWM信号的占空比作为控制量,在给定转速定为18 r/min时,不同的学习速率下超声马达速度控制的响应曲线如图3所示。
3 实验结果与分析
基于DDS的超声马达驱动控制电路的核心控制单元为DSP56F801的数字信号处理器、PWM信号发生单元采用CPLD、驱动电路采用双推挽拓扑结构的逆变电路,电力电子主电路包含4个MOSFET管和2个变压器。




图3 速度控制曲线
控制对象为Shinsei’s USR60行波超声马达。电机驱动频率为40 kHz;驱动电压为100 Vrms;额定转速为10 rad/s;额定转矩为0.32 Nm;额定输出功率为4 W。速度检测采用2000线高可靠性旋转编码器。编码器测得的转速信息通过DSP的计数单元进行处理,并利用PI控制规律和单神经元PID自适应控制算法进行控制实验。
3.1 以低频PWM占空比为控制变量
两相PWM驱动信号的频率设定为40 kHz, 相位差设定为900,占空比设定为30%。低频PWM频率为1 KHz,在给定转速为18 r/min时采用常规PI控制的电机速度响应曲线如图4所示,采用单神经元自适应PID控制的电机速度响应曲线如图5所示。

图4 超声马达速度响应曲线
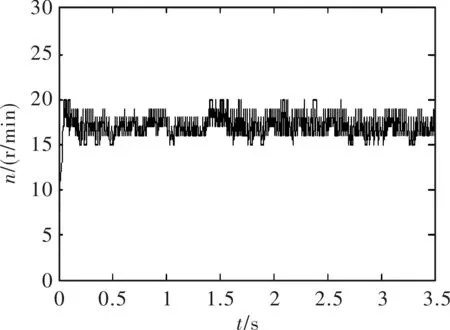
图5 超声马达速度响应曲线
3.2 选取频率控制字为控制变量进行测试
两相PWM驱动信号相位差900、幅值占空比为30%,给定转速设定为40 r/min,采用常规PI控制的电机速度响应曲线如图6所示,采用单神经元自适应PID控制的电机速度响应曲线如图7所示。
在以上两种控制变量选取下,通过对以传统PI控制与单神经元PID自适应控制所得到的电机转速特性进行对比可知:传统PI控制系统下,速度特性不仅超调大而且响应慢。单神经元PID自适应控制系统具有较好的转速跟踪特性,启动过程中虽然也有振荡,但是振荡幅度不大,系统响应速度较快,稳态转速稳定性较好。
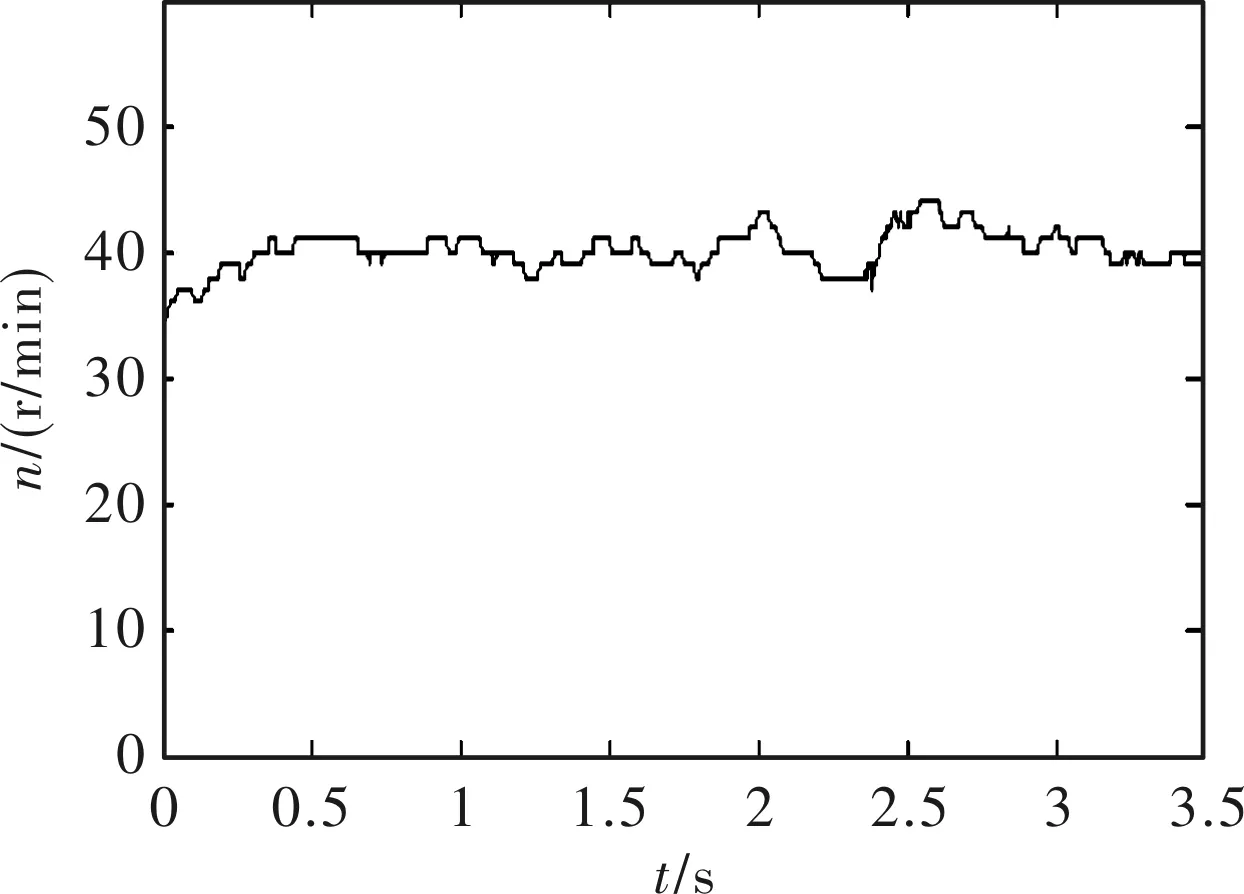
图6 常规PI控制的超声马达速度响应曲线

图7 单神经元自适应PID控制的超声马达速度响应曲线
4 结 语
在基于DDS超声马达驱动控制系统试验平台上,运用单神经元自适应PID控制策略对超声马达进行控制,分别在控制低频脉宽调制占空比以及频率控制字的方式下,对超声马达的单神经元PID自适应控制系统进行了转速响应实验研究。
(1)单神经元自适应控制算法融合了神经网络控制策略和传统PID控制策略的优点,实现了控制器参数的在线整定。
(2)超声马达单神经元PID自适应控制在不需要精确的超声马达数学模型的情况下能够对超声马达进行快速精确的控制。
猜你喜欢
电子测试(2018年15期)2018-09-26 06:01:04
制造技术与机床(2017年6期)2018-01-19 02:41:07
小学生导刊(2017年15期)2017-05-17 05:44:09
棋艺(2016年4期)2016-09-20 06:15:27
中国塑料(2016年3期)2016-06-15 20:30:00
自动化学报(2016年8期)2016-04-16 03:38:51
西北工业大学学报(2015年1期)2016-01-19 03:29:56
电源技术(2015年9期)2015-06-05 09:36:06
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23 08:20:35
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
