基于无人机光谱分析的农田监测系统应用
2019-05-24 09:55:30张乐春
农机化研究 2019年7期
张乐春
(南通科技职业学院,江苏 南通 226000)
0 引言
农田是农业生产的基础物资条件,主要由土壤、目标作物和杂草组成。农田监测的内容包括土壤类型、目标作物生长状况、杂草种类和数量,其监测结果是农艺管理操作的依据。农田的土壤类型较为稳定,在一定时期内不会有太大变化,因此无须进行实时监测。目标作物作为农业生产的主体,生长速度快,性状种类多,是农田监测的重点。杂草在农田中普遍存在,一般不会对目标作物造成严重的影响,只有出现爆发或生物入侵的情况下才需要进行监测。因此,大部分农田监测相关的研究都是针对目标作物长势的研究,旨在为田间管理和产量预测提供重要的信息[1-2]。
农作物长势是通过外部性状和内部性状综合评判的,外部性状可以被直接观察感知,如各组织器官的数量、形状和颜色等;外部性状通过观察记录或者测量统计获得,是作物生长状况的直接反映。内部性状是生理代谢状况和生理生化指标,如叶绿素含量、氮含量等,需要利用专门的仪器或方法测定获得。内部性状是外部性状产生的原因,可以作为分析作物生长趋势的参考因素。传统的农田监测是由人工完成,通过肉眼的观察和统计测量,或者利用便携式仪器测量,以及取样后在室内测定。人工监测方法的劳动强度大,效率较低,受人员技能和素质的影响,难以得到准确的结果。取样测定还会对作物造成损害,且所选农田区域的代表性有限,不能满足现代化农业的要求。
传统农田监测方法的缺陷主要是源于平台高度的限制,导致不能获得大面积的农田影像信息。随着科学的发展,以卫星和无人机为平台的遥感技术应用于农田信息监测中,有效地解决了上述问题。卫星遥感虽然覆盖面积大,但是空间和光谱分辨率较低,影响了监测的准确性[3]。相比之下,无人机遥感则兼顾了覆盖面积和监测精度,还具有操作简便和灵活性好的特点,成为农田监测的理想手段[4]。无人机全称无人驾驶航空飞行器,是由飞行平台、遥控站及通讯模块等部件组成的系统[5]。无人机在农业上主要用于农药喷洒、农业保险勘察和农田信息监测。其中,农田信息监测的内容包括作物长势、生理状况和病虫草害,都是通过现代遥感技术完成的。无人机遥感获得的农田信息范围大,实时性强且准确性高,与传统方法相比具有明显的优势[6-8]。
无人机通过农田影像的采集和分析来实现对农田的监测,影像采集设备为普通数码相机及多光谱相机或光谱仪。数码相机和多光谱相机采集的影像数据波段较少,光谱有限,不能全面地反映农田信息[9]。高光谱遥感是20世纪80年代兴起的技术,在拍摄地面图像的同时获得连续的光谱信息,通过分析光谱特征来对目标进行遥感监测。高光谱的波段连续性强,光谱数据量大,有利于获取农田作物的完整信息。目前,由无人机搭载的高光谱遥感已在农业中得到了广泛应用,对农作物生长状态和生理指标的检测是其应用的主要方面。高林等和田明璐等通过对无人机高光谱影像数据的分析,分别建立了针对冬小麦和棉花的叶面积指数估算模型[10-11]。裴浩杰等利用无人机获取的高光谱影像数据监测小麦的多个生理和生物量指标,从而评判小麦的综合长势[12]。秦占飞等采用相似的方法估测水稻叶片的全氮含量,用于评价水稻的营养状况[13]。此外,还有关于无人机高光谱对入侵杂草进行监测的报导[14]。
无人机拍摄农田影像后,还需要进行光谱分析,才能获得农田的目标信息。光谱分析是农田监测的重要手段,分析方法的选择对监测精度有很大的影响。为此,设计了基于无人机光谱分析的农田监测系统,并用于对水稻的叶绿素含量进行估算,评价系统监测的精度,为精准农业的发展提供技术支撑。
1 材料与方法
1.1 监测系统的组成
监测系统由无人机平台和光谱仪组成。无人机平台为大疆精灵Phantom 4 Advanced型旋翼无人机,有效载荷2kg,续航时间30min。无人机采用北斗定位,无线传输速度Class10,最远距离达到7km。地面站安装大疆DJIGS Pro版软件,规划无人机的飞行路径,通过PID控制方法将设定的航线发送给无人机,利用红外无线传输控制飞行速度和方向。
光谱影像采集设备为德国Cubert公司的UHD185型机载光谱仪,安置在无人机的正下方。UHD185是全画幅、非扫描的实时成像光谱仪,最小采样间隔4nm,光谱范围 450~950nm之间,分辨率为8nm。光谱仪质量为0.47kg,具有125个通道,单次拍摄可以产生1幅50×50像素的高光谱影像。
1.2 试验区概况
试验区位于江苏省南通市石港镇(东经120°59'42",北纬32°11'46"),地处长江下游的冲积平原,属亚热带季风气候,降雨量充沛。试验区内种植的作物为水稻,品种是杂交中稻扬两优818,采取常规的栽培措施。
1.3 影像拍摄和数据处理
1)在水稻的抽穗期采集农田光谱影像,采集时间为9:00-11:00,天气多云无风,能见度较好。无人机飞行高度80m,速度5m/s。光谱仪的镜头垂直向下,焦距22mm,拍摄视角15°,积分时间设定为1ms。光谱仪拍摄前在地面完成暗电流校正,利用参考板进行辐射标定。
2)采集光谱影像的同时在试验区内均匀选择30个1m×1m的取样点,每个点内随机选10片水稻剑叶,用SPAD-502型便携式叶绿素仪测定每片剑叶上、中、下3个部位的叶绿素含量(SPAD),以10片剑叶的平均值作为该样点的叶绿素含量。
3)光谱影像采集后利用光谱仪附带的软件进行辐射校正得到反射率,然后将影像导入ENVI5.1软件中识别出目标区域;以SPAD测定样点为中心构建兴趣区,将兴趣区内的平均反射率光谱作为该样点的特征光谱用于分析。从30个样点中随机选择15个作为建模样本,其余15个作为检验样本。
1.4 光谱参数选择和模型构建
将样点的各波段反射率进行线性或非线性组合计算,可以得到相应的光谱参数,消除背景信息的干扰,提高估算精度。UHD数据中包含丰富的光谱参数,本文参考田明璐等的研究,选取了对叶绿素含量敏感的4个光谱参数用于对水稻剑叶叶绿素含量的估算[4]。4个参数DR526、DR578、SDy和Db都与叶绿素含量呈线性关系,参数的定义如表1所示。叶绿素含量的光谱参数估算模型在SPSS软件中通过一元线性回归建立,然后在ENVI环境中对检验样本的叶绿素含量进行反演。光谱参数与叶绿素含量的相关性以及模型对检验样本的估算精度通过拟合方程的决定系数R2衡量,R2值越大,则相关性和估算精度越高。

表1 光谱参数的定义Table 1 Definition of the spectral indexes
2 结果与分析
4个光谱参数与建模样本水稻叶片SPAD值的回归分析结果如图1所示。所有光谱参数的模型方程都达到了显著水平,表明这些光谱参数都含有可用于估算SPAD的信息。4个参数中,基于DR526和SDy建立的模型精度较高,建模决定系数R2分别为0.753和0.726,因此用来对检验样本的SPAD实测值和估算值进行拟合分析。
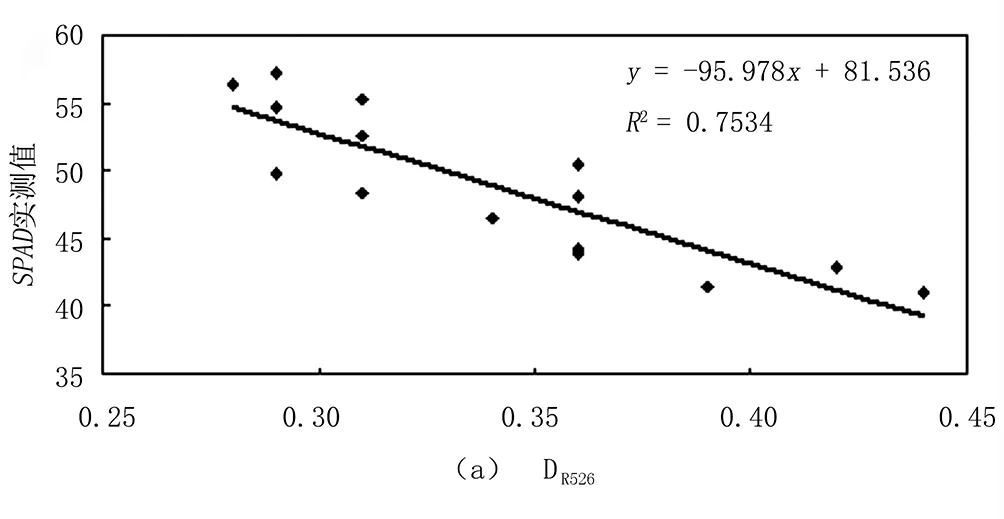
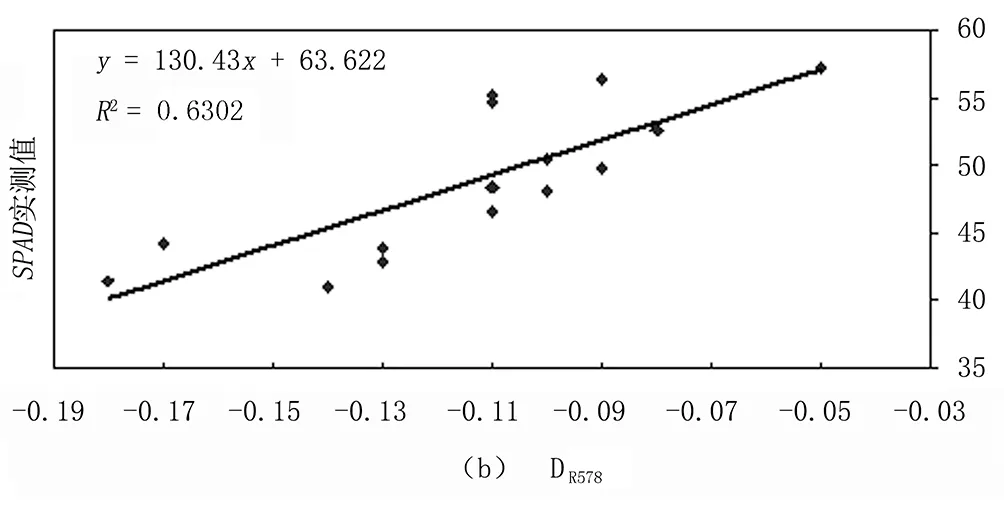


图1 光谱参数与水稻叶片SPAD值的相关性Fig.1 The correlation between spectral indexes and rice leaf SPAD value
分别用SPAD-DR526和SPAD-SDy模型对15个检验样本的SPAD实测值和估算值进行拟合分析,拟合方程的决定系数R2和斜率越接近1,表明模型的精度越高。分析结果如图2所示。
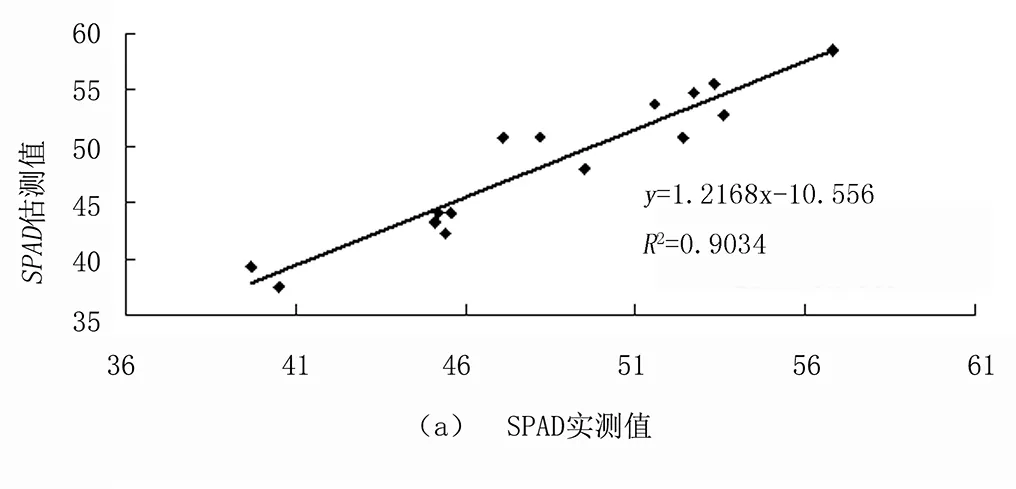
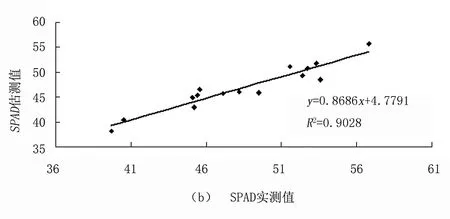
图2 检验样本水稻叶片SPAD估算值与实测值的拟合Fig.2 Regression of estimated and measured rice leaf SPAD values (samples for validation)
其两个模型的R2都超过0.9,具有较高的精度。SPAD-DR526模型的斜率达到1.217,与SPAD-SDy模型的0.869相比,拟合的精度相对较低,因此SDy可以作为本文SPAD值的最佳估算参数。
3 结论
为了拓宽农田信息监测的手段,设计了基于无人机光谱分析的农田监测系统。系统利用大疆精灵旋翼无人机搭载德国UHD185型光谱仪拍摄水稻田的高光谱影像,基于多个光谱参数建立回归模型,对水稻剑叶的叶绿素含量进行估算。4个光谱参数与建模样本水稻叶片SPAD值的回归分析都达到显著水平,含有可用于估算SPAD的信息。基于DR526和SDy建立的模型精度较高,因此用来对检验样本的SPAD实测值和估算值进行拟合分析。两个模型拟合方程的R2都超过0.9,具有较高的精度。结合模型的斜率值,则SDy可以作为本文SPAD值的最佳估算参数。无人机光谱分析对农田监测的精度较高,能为精准农业的发展提供技术支撑。
猜你喜欢
小猕猴智力画刊(2022年3期)2022-03-28 01:37:47
阅读(科学探秘)(2020年8期)2020-11-06 06:22:48
中国果业信息(2019年1期)2019-01-05 17:41:42
生物学教学(2017年9期)2017-08-20 13:22:32
发明与创新(2017年3期)2017-01-18 05:14:04
光学精密工程(2016年6期)2016-11-07 09:08:20
光学精密工程(2016年5期)2016-11-07 09:06:10
农家科技中旬版(2016年12期)2016-04-16 03:41:29
卫星与网络(2016年12期)2016-02-05 09:23:26
安徽工业大学学报(自然科学版)(2014年4期)2014-07-11 01:45:56