
除草机器人路标识别多模式匹配算法研究——面向中英文混合环境
2019-05-24 09:48宋锦博
农机化研究 2019年7期
宋锦博
(商丘医学高等专科学校 公共学科部,河南 商丘 476000)
0 引言
近年来,随着电子计算机技术的进步,计算机图像处理得到了飞跃的发展,已经成功地应用于几乎所有与成像有关的领域,并正发挥着相当重要的作用。基于计算机图像处理的机器视觉技术也得到了迅速的发展,并被应用到了自主导航领域。除草机器人是当前农业生产中逐步开始采用的一种新的农田作业机械,由于缺乏成熟的自主导航系统,除草机器人的自主导航能力还不高,为了便于其自主作业,可以采用英文字母路标的形式对不同的田块进行区分和识别。为了使导航路标便于区分,还可以加入汉语字符,混合字符的出现会给路标的识别造成一定的麻烦,而采用多模式匹配算法,使导航路标在中英文混合环境下具有较高的识别效率,对于除草自动化作业机械的设计具有重要的意义。
1 基于中英文混合环境的匹配算法和除草机器人概述
为了实现除草机器人的自动导航功能,可以采用机器视觉系统,导航路标是机器视觉系统识别匹配路线的重要标志。在路标设置上一般采用英文标志,这是由于英文标志较容易识别,但为了使导航标记容易理解,往往加入了汉语部分,从而构成了中英文混合环境。英文字符一般采用ASCII进行编码,一个字符占用一个字节,中文字符一般采用GB编码,一个字符占用两个字节。由于编码长度和规则的不同,容易造成复杂的多模式匹配的混合环境。在单字节情况下,对路标符号进行匹配时由于字节长度一致,匹配时只需要根据固定的长度进行便可以;而在中英双语境,不同字符出现的概率是随机的,如果字节属性在匹配过程中出现错误会造成匹配错位,会造成匹配失败。
例如,对字符串路标”3C|62|3E|CBD1|CBF7| B2FA|C6B7|3C|2F|62|3E”的匹配,假设匹配关键词为”B2FA|C6B7”,如果在处理字符边界时出现错误,导致匹配从低字节D1开始,而使字节组合变为”3C|62|3E|CB|D1CB|F7B2|FAC6|B73C|2F|62|3E”,从而出了很多错误,导致匹配失败。因此,在中英环境匹配时,可以采用相关算法对匹配过程进行优化,本次采用的是完全哈希Trid的多模式匹配算法,该算法是一种深度可变的多层树型索引结构,采用宽度优先算法,在同一层叶子节点上从左边到右边逐次匹配,得到匹配结果之后再转入到下一层继续查找,其原理如图1所示。
由于采用这种搜索匹配算法不需要对汉字的高低字节进行附加运算,对英文的匹配速度也较快,因此具有较高的搜索匹配效率,也很少会出现匹配错误的情况。
图2所示是法国制造的一款除草机器人,可在清理小面积田地的杂草时使用,具有自主作业能力,也可以跟随和遥控使用,采用机器视觉系统判定导航线,可区分杂草和农作物。本次研究的除草机器人主要是通过机器视觉系统对英文和中文混合路标进行识别,并采用相关图像处理算法对路标进行增强处理,最后通过不同环境下的导航实验来验证方案的可行性。
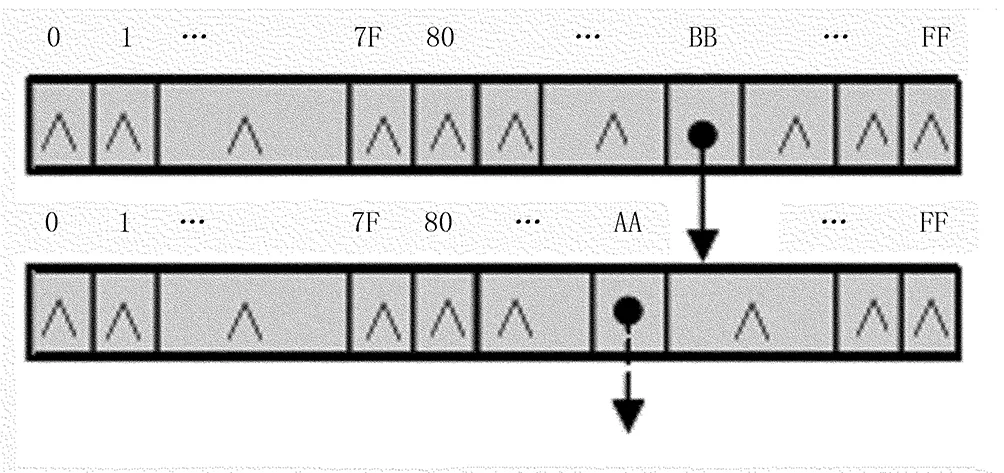
图1 搜索匹配结构示意图Fig.1 The schematic diagram of search matching
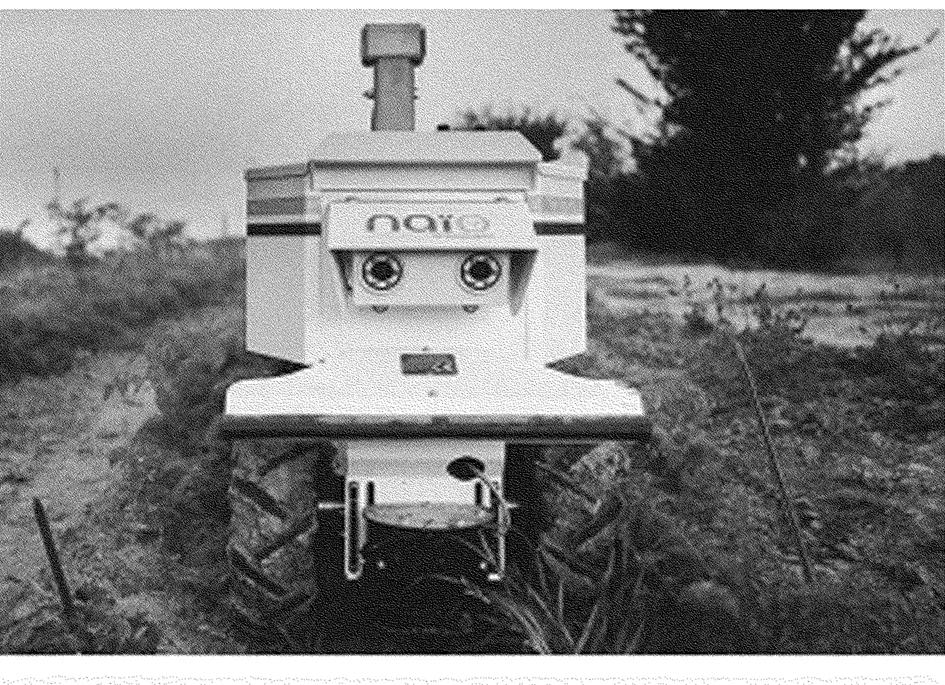
图2 OZ除草机器人Fig.2 OZ herbicidal robot
2 基于灰度变换和图像增强的路标导航图像处理
为了使除草机器人更容易识别路标导航图像,可以采用图像增强的方法对图像进行灰度处理,通过灰度处理调整图像的灰度动态范围,达到局部增强的目的,从而使机器人更容易识别路标。其流程如图3所示。
路标导航图像的处理核心技术是进行图像灰度变换。图像灰度变换采用一个变换函数g=T[f]将原来采集图像的灰度f(x,y)变换为g(x,y),得到一个新的灰度值,即
g(x,y)=T[f(x,y)]
(1)
根据灰度变换的形式,灰度变化分为线性变换和非线性变换,线性变换是采用线性拉伸的方法使灰度动态范围加大,有效地改善路标图像的视觉效果,其变化形式为
(2)
其中,图像f(i,j)的灰度范围是[a,b],通过线性变换后图像g(i,j)的范围为[a′,b′],如图4所示。
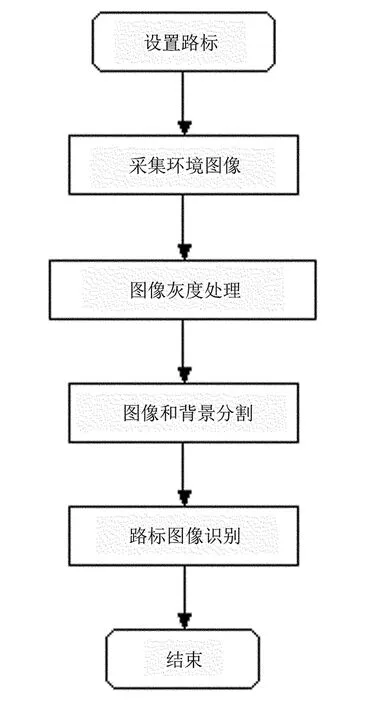
图3 路标导航图像处理流程Fig.3 The image processing flow of road sign navigation
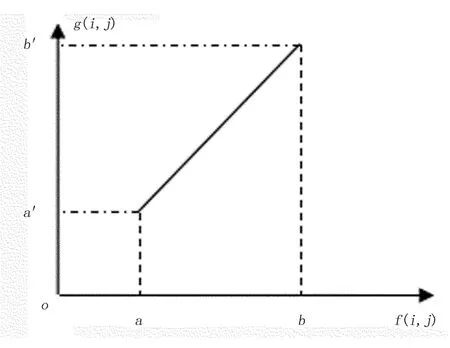
图4 图像灰度线性变换示意图Fig.4 The diagram of image gray linear transformation
利用灰度线性变换可以将灰度强度进行改变,变换像素的灰度层次感,除了线性变换还有直方图方法,图像的直方图可以描述图像的概貌,通过直方图的变化也可以对图像进行局部增强。
采用直方图方法可以假设变量r代表图像中像素灰度级,对除草机器人采集到的中英混合路标的像素灰度级进行归一化处理,将r限定在灰度级(0≤r≤1)范围内。其中,当r=0时表示完全黑色,当r=1时表示完全白色。对于每个像素在[0,1]之间是随机的,在离散形式下,假设离散灰度级为rk,概率密度函数为P(rk),且有
(3)
其中,nk为图像中出现rk这种灰度的像素数;nk为图像中像素总数;Nk/n为直方分布中的频数;n为灰度级的总数目。为了使灰度直方图便于处理,可以采用一定的手段对直方图进行均衡化处理,使灰度级均匀分布,直方图具有规定的形状,从而突出感兴趣的灰度范围。令Pr(r)和PZ(Z)分别为原始图像和期望图像的灰度概率函数,对其直方图进行均衡化后可得
(4)
由式(4)可以看出:通过直方图均衡化后可以由均衡化后的灰度变量V获得期望图像的灰度变量Z,直方图规定化处理后可以得到具有预先期望得到的概率密度PZ(Z),从而可以根据需要进行图像处理。
为了更加突出农作物的视觉效果,降低农田环境对视觉效果的影响,对作物重点进行增强处理,如图5所示。处理结果表明:采用本次灰度处理方法可行,得到了较为清晰的作物图像。

图5 图像增强处理前后效果图Fig.5 The effect map before and after image enhancement
3 除草机器人路标导航实验
为了验证面向中英文混合环境的多模式匹配算法及图像增强算法在除草机器人视觉系统中使用的可行性,以中文混合字符作为路标图像,对除草机机器视觉系统的识别准确率进行验证,采用的路标如图6所示。
为了更加快速识别中英混合路标,采用了多模式匹配算法和图像增强处理算法,采用编码的形式嵌入到采摘机器人视觉系统中,其识别流程如图7所示。
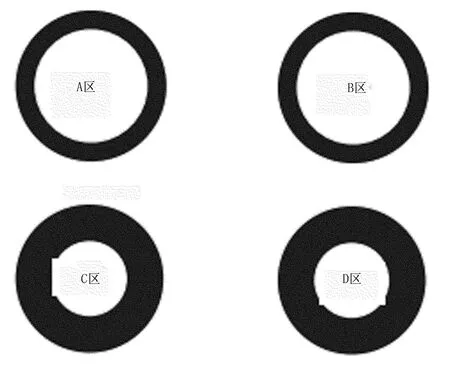
图6 导航路标示意图Fig.6 The diagrammatic sketch of navigation signpost
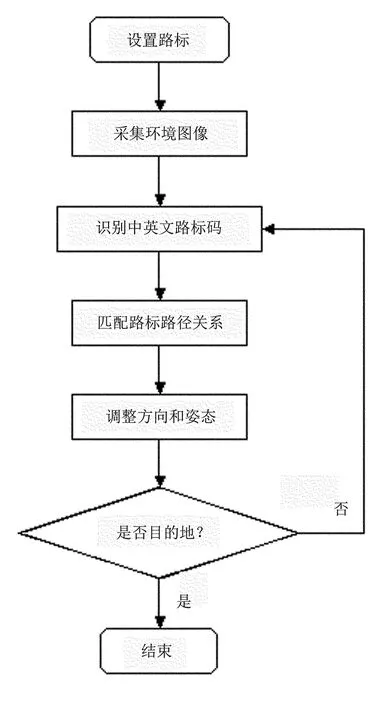
图7 除草机导航路标识别流程Fig.7 The identification process of navigational landmark for weeding machine
在识别到中英文路标码后可以采用多模式匹配算法对路径关系进行匹配,并判断是否需要调整姿态和方向,通过环境采集得到的图像如图8所示。
通过除草机器人视觉系统采集得到的待除草原始采集图像背景颜色较重,不容易区分垄间和作物之间的区别,降低了识别的准确率,因此需要对图像进行增强处理,处理之后的图像如图9所示。
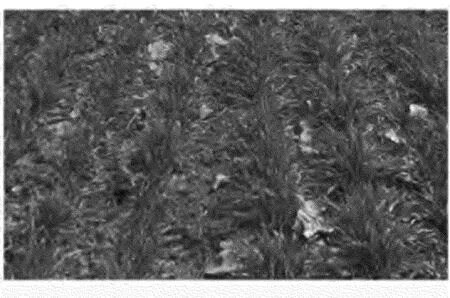
图8 待除草原始采集图像Fig.8 The original acquisition image of weeding
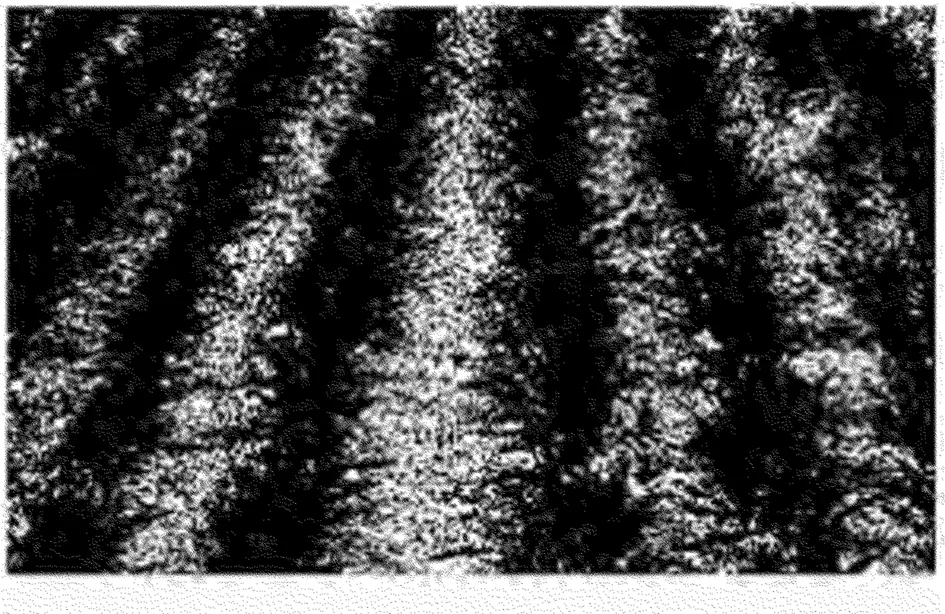
图9 机器视觉处理后图像Fig.9 The image after machine vision processing
通过图像增强处理后得到了作物和垄间较为明显的区分图像,加快了除草机器人机器视觉系统识别的准确率和效率。通过实验得到了路标准确识别的统计数据如表1所示。
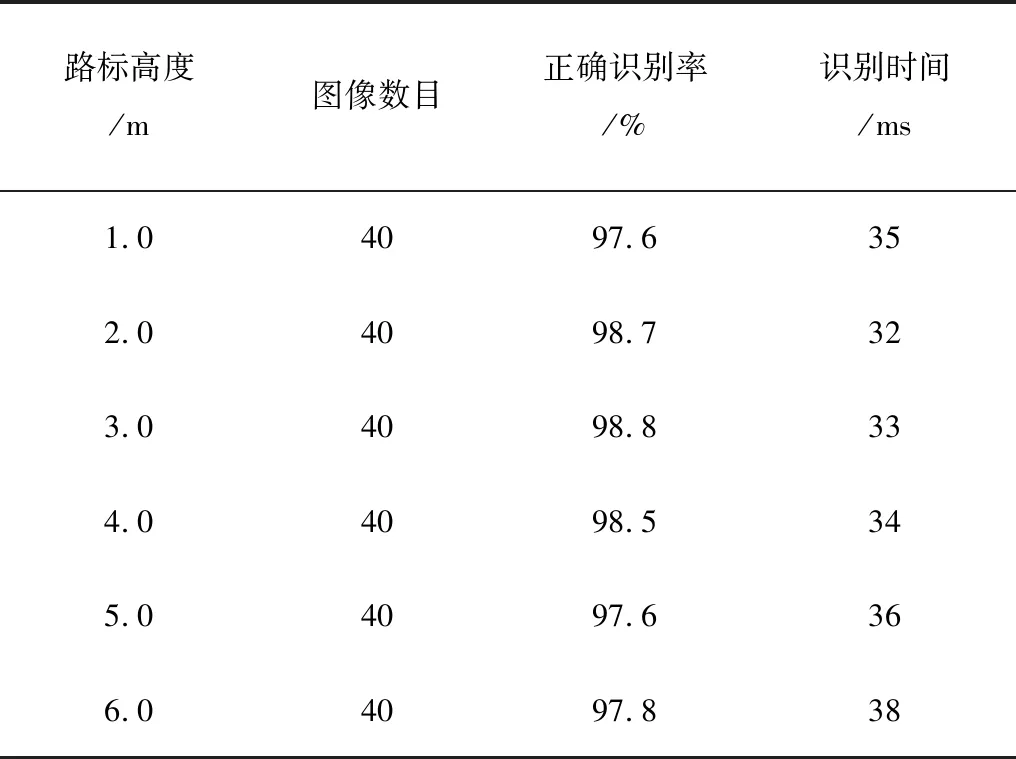
表1 路标准确识别数据统计Table 1 The accurate identification of data statistics by road signs
由测试结果可以看出:采用多模式匹配算法和图像增强算法得到的准确识别率较高,最低识别率也高于95%,满足设计需求。
在干扰条件下,对路标准确率进行了测试得到了识别率的测试结果(见表2)。由测试结果可以看出:在较暗或者较亮时,除草机器人机器视觉系统依然具有较高的准确识别率,对环境的适应性较强,从而也验证了多模式匹配算法的可靠性。

表2 在干扰条件下路标准确识别数据统计Table 2 The identification of data statistics by road standards under interference conditions
4 结论
在中英文混合环境下,为了提高除草机器人机器视觉系统路标导航识别的准确率,引入了多模式匹配算法,并采用图像增强算法对采摘机器人作业采集的图像进行了增强处理,得到了作物和垄间更加清晰的轮廓图像。最后,对除草机器人机器视觉系统图像识别的准确率进行了测试,测试结果表明:除草采摘机器人路标的识别准确率较高,且在干扰条件下仍具有较高的识别准确率,从而验证了中英文混合环境下多模式匹配算法的可靠性,为除草机器人自动导航系统的研究提供了较有价值的参考。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
航天返回与遥感(2022年2期)2022-05-12
现代电子技术(2022年1期)2022-01-25
燃气涡轮试验与研究(2021年6期)2021-08-01
读写月报(初中版)(2021年12期)2021-05-25
小猕猴智力画刊(2020年2期)2020-03-08
电子制作(2019年13期)2020-01-14
世界文化(2019年10期)2019-10-23
移动信息(2018年1期)2018-12-28
北京航空航天大学学报(2017年3期)2017-11-23
