
不同土壤比阻下拖拉机耕深均匀性研究
2019-05-24 06:22:14李瑞川李玉善徐继康刘延俊
农机化研究 2019年12期
马 勇,李瑞川,李玉善,徐继康,2,赵 鹏,刘延俊
(1.山东科技大学 交通学院,山东 青岛 266590;2.日照海卓液压有限公司,山东 日照 276800;3.山东海卓电液控制工程技术研究院,山东 日照 276800;4.山东大学 a.机械工程学院;b.海洋研究院,济南250061)
0 引言
拖拉机是现代农业生产不可或缺的动力平台,它通过驱动电液悬挂系统实现犁耕作业的升降控制[1-3]。在拖拉机耕作时,土壤环境复杂多变、随机因素较多,仅以单一参数为控制目标无法获得良好的耕深均匀性,发动机负荷波动也较明显[2]。为此,相关学者结合拖拉机工作特性、土壤情况,将加权系数引入到拖拉机耕深控制中,提出了力位综合控制的思想[4-6]。通过调节权重大小,既可保证拖拉机在某一地块的耕作均匀性,也能有效减小负荷的波动。
一般情况下,拖拉机耕作区域相对灵活,特别在土地规模化经营的趋势下,跨区作业将成为未来耕作模式的新常态。但不同区域土壤情况千差万别[7],而加权系数则是驾驶员根据常耕地块的经验设定,尚不能随耕作环境变化实现柔性自动调节[1],这将无法保证良好的耕深均匀性。在控制方法上,研究人员将模糊控制与PID控制相结合应用于耕深调节中[1,8],虽在大扰动、时变、非线性等随机土壤环境因素下可得到较好的耕深均匀性,但相关参数的设定受人为因素影响较大,其模糊论域不能随土壤环境变化自动伸缩,致使不同土壤比阻时,系统响应时间和超调量均有很大差别。
为此,本文将变论域思想引入拖拉机力位综合控制中,设计出变论域模糊PID控制器,探究不同土壤比阻下加权系数取值对系统响应特性及拖拉机耕深均匀性的影响,为拖拉机跨区作业时加权系数的合理选择提供理论依据。
1 力位综合控制原理与策略
1.1 力位综合控制工作原理
拖拉机力位综合控制是通过加权系数调节控制系统中位调节和力调节所占权重实现的,原理如图1所示。

图1 拖拉机耕作力位综合控制原理图
在拖拉机耕作前,驾驶员根据耕深要求、发动机负荷等因素,通过控制面板预先设定耕深、牵引力及加权系数。作业过程中,耕深信号由位置传感器提供的反馈信号与力传感器转换的反馈信号根据加权系数大小计算获得,并与设定耕深比较产生偏差信号。接着根据预先制定的控制方案输出相应的控制电压,驱动电液比例控制阀动作,调节悬挂机构,进而改变犁体的入土深度。
1.2 系统控制策略
电液悬挂系统以耕深均匀性为主要目标,结合加权系数大小,选择相应的控制模式调节耕深,其控制流程如图2所示。

图2 拖拉机耕作力位综合控制流程图
加权系数的取值是耕深调节的关键。拖拉机在某一区域作业前,系统首先做初始化处理,然后判断加权系数是否在允许范围内取值,当其在设定区间时,再根据数值大小确定两反馈信号所占比例。若加权系数改变,系统将再次执行上述流程,最终获得该区域较合理的加权系数。然而,在拖拉机跨区作业时,此控制流程较为繁琐,如何根据系统闭环控制特点和土壤性质合理确定不同土壤比阻下加权系数的取值范围成为关键。
2 变论域模糊PID控制器设计
2.1 设计思想与控制器结构
拖拉机在某一地域耕作时,模糊PID控制具有较好的响应特性,但当拖拉机跨区作业时,其控制误差较大,响应时间不一。变论域控制思想是在不改变控制规则和比例、量化因子的前提下引入伸缩因子,使得基本论域实时随系统误差变化而变化,解决了土壤比阻波动带来的滞后及非线性问题,也可有效提高系统控制精度[9-10]。
根据变论域控制原理[11-12],此控制器可根据系统耕深误差信号利用伸缩因子改变模糊论域,实现耕深误差的“细调”与“粗调”。控制器结构如图3所示。
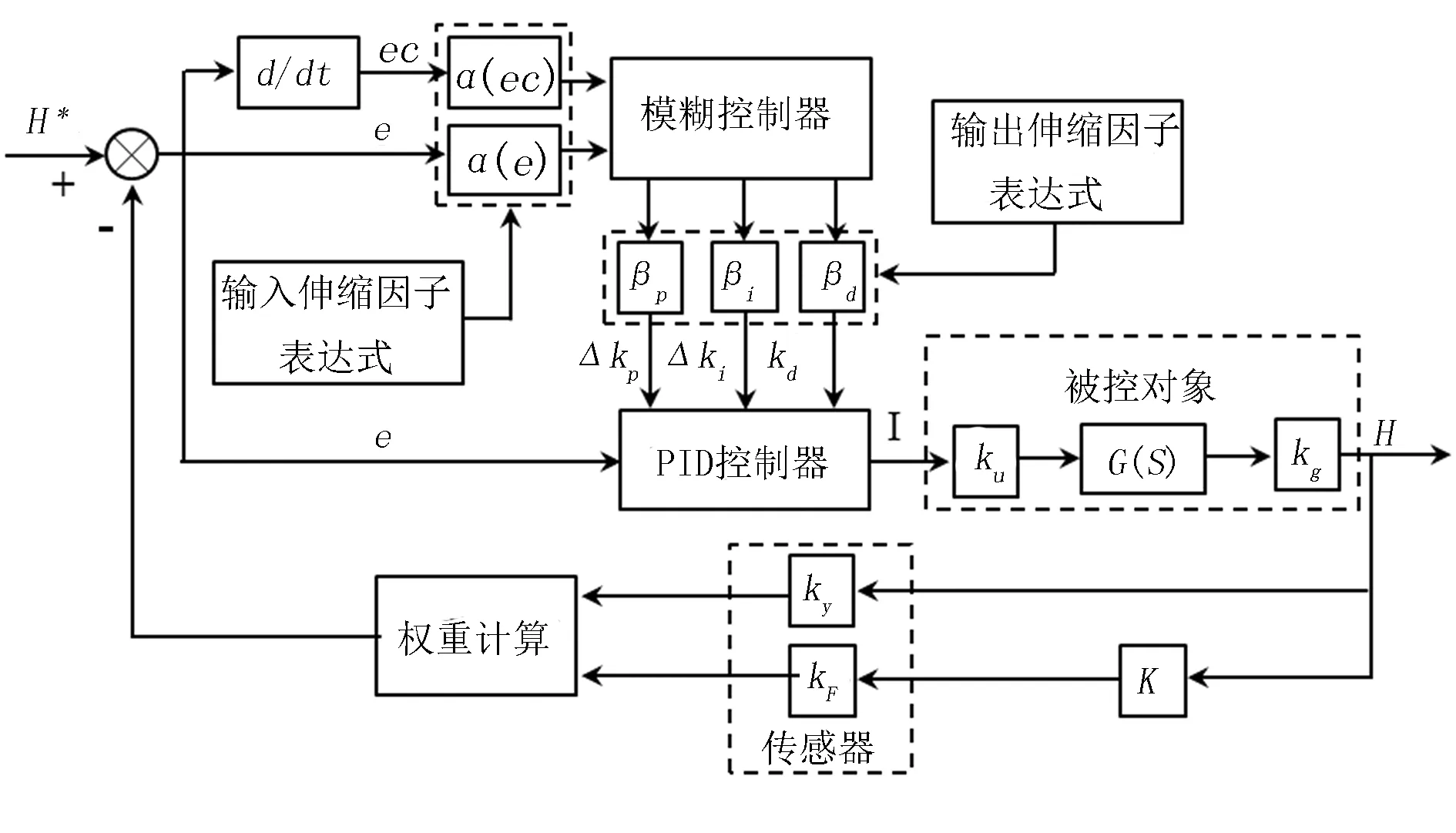
图3 变论域模糊PID控制器结构框图
控制系统首先计算反馈信号与设定耕深的差值并输入控制器,然后根据误差e和误差变化率ec计算伸缩因子,并结合已有的比例、量化因子共同完成模糊论域的伸缩变换,实现误差信号的实时在线调整。
2.2 伸缩因子的设计
如何合理选取伸缩因子是变论域模糊PID控制器设计的关键[12]。目前,关于伸缩因子的选取方法尚无统一标准,多数根据被控对象特点选用函数型和模糊推理型两种[9-13],但后者计算量较大,实时性稍差,故本文选用函数型伸缩因子。
设输入变量的基本论域为X=[-α(x)E,α(x)E],输出变量的基本论域为Y=[-β(y)K,β(y)K]。其中,α(x)、β(y)分别为输入、输出伸缩因子。
在输入论域中,伸缩因子由下式确定
α(x)=1-εe-kx2(0<ε<1,k>0)
其中,ε、k为常数,根据系统性能确定;x为耕深误差e或误差变化率ec。
在输出论域中,为了更合理地确定伸缩因子,综合考虑PID控制器输入变量特点,使得ΔKp、ΔKd的伸缩因子与耕深误差e变化方向保持一致,ΔKi的伸缩因子则与耕深误差e保持反向[10],具体可表示为
βp,d=|2e|
2.3 模糊PID控制器设计
根据不同的功能需求,模糊PID控制器的结构形式多种多样。在力位综合控制中,采用两输入三输出结构。输入量是耕深误差e和误差变化率ec,输出量为PID参数修正量ΔKp、ΔKi、ΔKd。
鉴于拖拉机跨区作业土壤比阻波动明显的情况,将耕深误差e和误差变化率ec的基本论域定为[-20,20]和[-6000,6000],3个修正信号ΔKp、ΔKi、ΔKd的基本论域选为[-7.32,7.32]、[-1.2,1.2]和[-0.03,0.03]。因此,输入输出变量的模糊论域均取[-6,6],并用{NB,NM,NS,ZO,PS,PM,PB}等7个模糊子集划分模糊论域。在隶属函数形状的选取中,优势突出的三角形隶属函数是本文的首选[8]。
在建立模糊控制规则时,综合考虑拖拉机跨区作业控制系统工作特点和各控制参数之间的相互关系,制定出如表1所示的模糊控制规则。
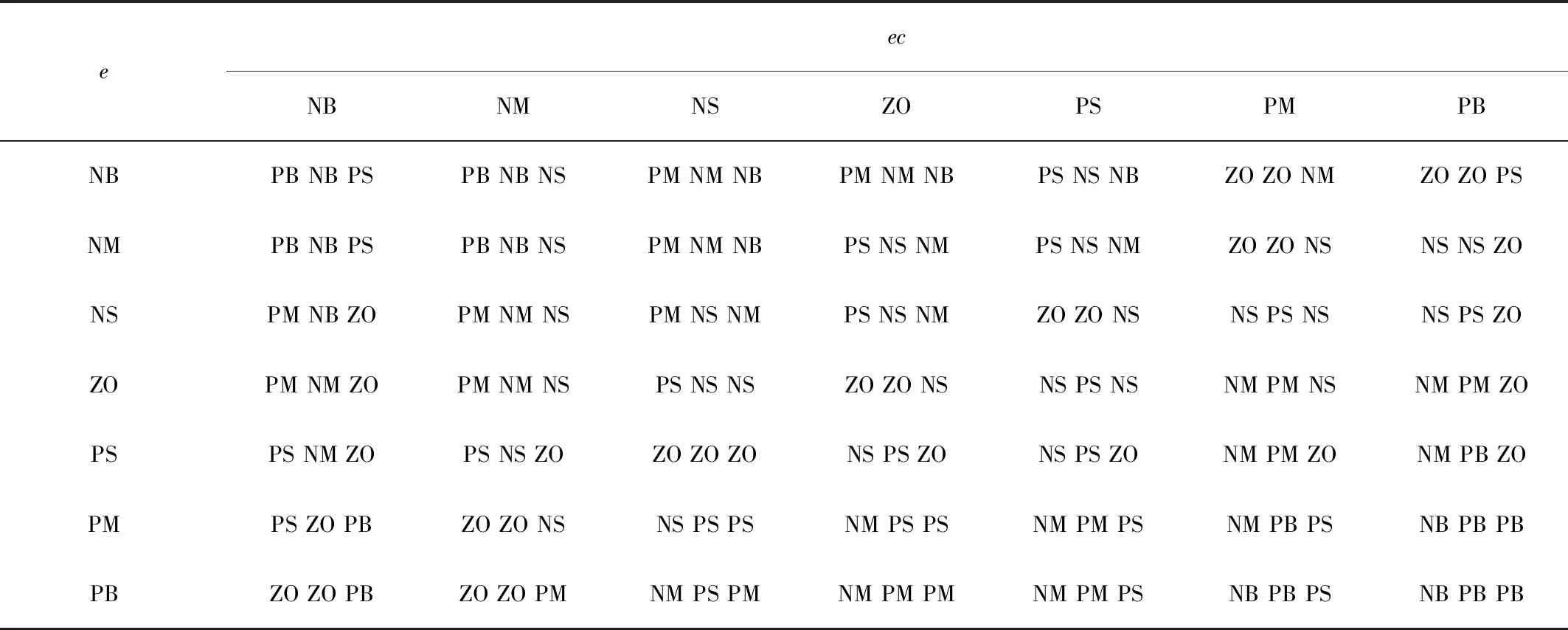
表1 ΔKp、ΔKi、ΔKd模糊控制规则表
为了较好地输出模糊控制器的运算结果,获得更为精确的控制效果,采用重心法对其输出结果做清晰化处理后在线校正PID控制器参数。校正表达式为
Kp,i,d=Kp0,d0,i0+ΔKp,i,d
其中,Kp0,d0,i0分别表示比例、积分和微分的初始值,根据经验确定。
3 试验验证与结果分析
3.1 系统响应特性仿真试验
为验证文本所选控制策略的合理性及变论域模糊PID控制器的优越性,减少拖拉机田间实车试验时的相关投入,首先借助MatLab/Simulink软件仿真平台,搭建拖拉机电液悬挂系统力位综合控制仿真模型,在典型土质下研究不同加权系数时系统的响应特性。
为保证与实车试验的一致性,系统仿真试验时将耕深设定为25cm。对比观察加权系数取0、0.5、1时响应曲线的变化趋势并绘制在同一图形中(见图4),分析响应时间、最大超调量和静态误差等控制效果。
根据仿真曲线可得:无论加权系数如何取值,系统的响应速度均较快,达到稳定耕深的时间均小于1s,且没有超调现象,也不存在静态误差。这说明,本控制方案能较好地满足拖拉机快速升降的工况需求。

图4 典型土质下系统响应仿真曲线
3.2 田间实车试验
3.2.1 试验条件
为了测算与分析拖拉机跨区耕作时的实际土壤情况,验证本控制器的适应性,以五征雷诺曼PH1454型拖拉机为载体,选用本团队自主研发的电液比例阀为耕深控制阀,搭建田间试验平台。选择五征集团现有试验田进行拖拉机跨区耕作试验,其田间实车试验场景及主要部件安装位置如图5、图6所示。

图5 拖拉机田间实车试验场景图
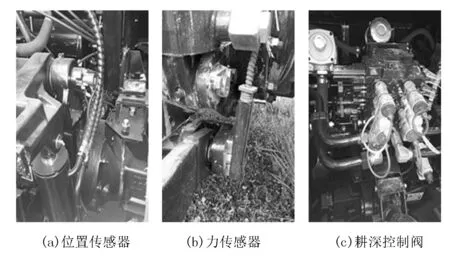
图6 传感器和控制阀安装位置
3.2.2 试验方案
为能全面反映拖拉机跨区耕作土壤比阻的变化情况,充分体现各种土质性能,在试验前查阅相关文献[1,7]并结合五征集团现有试验田的土壤统计数据,选择地面平整、土壤比阻均值约为3、4、6N/cm2的3块典型试验田,并分别定义为小比阻、适中比阻、大比阻。每块试验田分别检测不同加权系数时耕深的变化情况,真实反映拖拉机跨区作业时加权系数在耕深调节中的作用。
试验开始时,以适中比阻为基准,进行梨架调平和传感器标定等工作。同时,将耕深设定为25cm,牵引力设定为7kN,拖拉机档位设定为B2挡,以7.5km/h的车速匀速直线行驶,记录典型土质下不同加权系数时的试验数据。
3.2.3 试验数据处理与分析
将拖拉机在3块试验田耕作的试验数据统计分析后导入MatLab软件平台,得到典型土质下拖拉机耕深变化曲线,如图7所示。
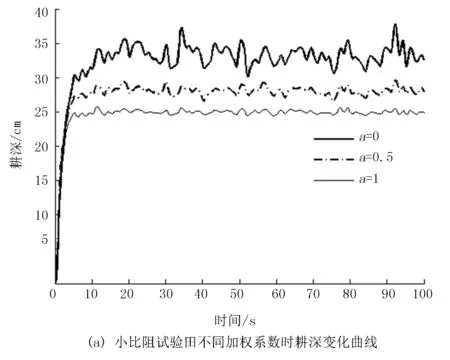

图7 典型土质下拖拉机耕深试验曲线
对比图7的耕深试验曲线可得:拖拉机在相同土壤比阻下耕作时,随着加权系数的增加,耕深波动幅度趋于平缓,耕深均匀性逐渐变好。在不同土壤比阻下耕作时,系统的响应均较快,但耕深的调节区间不同:小比阻时,在大于设定耕深的区段变化,但力调节所占权重越大,耕深波动越大,适合发挥位调节优势,加权系数取值应偏大;适中比阻时,在设定耕深附近波动,此时加权系数取中值,既可保证良好的耕深均匀性,也可避免发动机负荷过大的危险;大比阻时,在小于设定耕深的区段波动,虽然较大加权系数可获得良好的耕深均匀性,但发动机将长期处于过负荷工况,影响其寿命,在保证合理耕深区间的前提下,充分施展力调节的优势,加权系数取值应偏小。
4 结论
鉴于我国农业耕作模式的新常态,提出了拖拉机跨区耕作变论域模糊PID控制方法,同时开展了系统响应特性仿真试验和典型土质田间耕深试验。结果表明:无论加权系数和土壤比阻如何取值,系统的响应速度均较快,达到稳定耕深的响应时间较短,体现了本文所选控制方案的优越性;加权系数对拖拉机耕深调节区间和耕深均匀性都有较大影响,但无论其如何取值,耕深基本保持在合理耕深范围,可以为作物生长提供良好的土壤环境。另外,不同土壤比阻的耕深试验曲线,可为加权系数的合理选择提供一定的参考依据,也为其自动调节的研究奠定了理论基础。
猜你喜欢
农机化研究(2024年4期)2024-01-09 09:46:54
成都信息工程大学学报(2021年6期)2021-02-12 03:00:52
农业机械学报(2020年9期)2020-10-10 06:32:54
价值工程(2019年31期)2019-12-04 04:11:05
中国储运(2019年1期)2019-01-09 06:57:54
测控技术(2018年10期)2018-11-25 09:35:52
灾害医学与救援(电子版)(2018年1期)2018-06-05 02:15:40
农业工程学报(2017年22期)2017-12-15 02:50:09
新农业(2016年19期)2016-08-16 12:00:18
广东石油化工学院学报(2016年3期)2016-05-17 05:17:10
