
拖拉机驾驶室人机工程学优化设计
2019-05-24 06:28杨秀芳杨自栋王正立王依人
农机化研究 2019年12期
杨秀芳,杨自栋 ,覃 乾,王正立,王依人
(1.浙江农林大学 工程学院,杭州 311300;2.南京航空航天大学 民航学院,南京 211106)
0 引言
拖拉机驾驶室是驾驶员的工作场所,直接与驾驶员进行人机交互,而人机工程学的良好设计对驾驶员的操纵舒适性和驾驶安全性有直接的影响,还可以减少驾驶员的体力劳动和精神负担,提高驾驶员的工作效率。
拖拉机驾驶室的人机工程学研究从20世纪50年代开始,设计师们把汽车驾驶室和飞机驾驶舱人机工程学的研究方法应用到拖拉机的驾驶室设计中[1-4]。农业现代化程度高的国家(如日本、欧美等国)比较早地将人机工程学应用于农业机械的设计与评价中[5-7],目前研究重点偏向座椅减振悬架和驾驶室的研究[8-10]。国内相关研究起步比较晚,多数侧重在拖拉机驾驶室人机工程学的理论分析上[11-12],研究也相对较少[13]。项目组前期对拖拉机驾驶室的操纵舒适性进行了调查,发现在人机工程学方面有待进一步完善。
本文以国产东方红LX-1204型拖拉机为研究对象,利用Creo3.0构建三维模型,运用CATIA软件的人机工程学模块,建立拖拉机驾驶室的人机系统模型,对驾驶员的视野、操纵舒适性及可达性进行评价,结合驾驶室操纵舒适性的调查,在人机工程学方面可以进一步优化,从而提高驾驶室操纵舒适性,为驾驶室的设计提供一定的参考。
1 驾驶室人机系统的建立
1.1 H点的确定
H点(即胯点,驾驶过程中人体躯干与大腿间的交接点)是驾驶室座椅空间尺寸的基准点,设计的合理性直接影响驾驶员的舒适性、安全性、视野及手伸界面。有两种方法确定H点:①根据GB/T6235-2004《农业拖拉机驾驶员座位装置尺寸》中SIP(拖拉机驾驶员座椅标志点)的推荐值确定范围[14];②根据SAE(美国汽车工程师学会)驾驶员H点位置曲线确定[15]。本文通过两种方法的结合确定H点。
SAE适意H点的确认方法有A类和B类车的区别,拖拉机属于B类车,可采用B类车方法确定[16]。驾驶员男女比例一般介于 90:10 至 95:5 之间,可根据公式(1)计算,即
(1)
由此来确定H点距油门踏板踵点(Accelerated Heel Point,AHP)的水平距离X的值。
根据H点示意法,首先应估算出实际H点与确定的AHP位置的垂直距离Z。GB/T6235-2004 中推荐其范围为 450~520mm,结合东方红LX1204驾驶室的具体空间尺寸,根据经验分别选定Z值为490 、470、450mm。将Z值代入式(1)得到
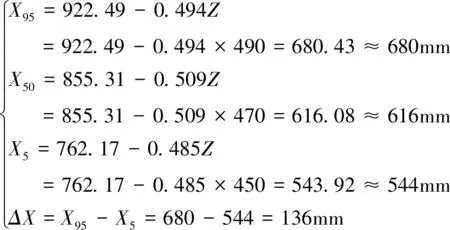
(2)
通过以上的分析和计算,最终确定P95、P50、P5驾驶员实际H点在(X,Z)上的坐标分别为(680,490)、(616,470)、(544,450),Y方向上的位置与座椅纵向中心面的位置一致,座椅的水平调节量为136mm。
1.2 创建驾驶室模型
根据 GB/T 6238-2004《农业拖拉机驾驶室门道、紧急出口与驾驶员的工作位置尺寸》[17]、GB/T 6235-2004《农业拖拉机驾驶员座位装置尺寸》的规定及推荐值,结合东方红LX-1204拖拉机的实际状况,采用Creo3.0软件建立驾驶室的三维模型如图1所示,驾驶室内部总体布局如图2所示。

图1 驾驶室三维模型
1.3 人体模型的建立
CATIA人体模型库中共有美国、加拿大、法国、日本、韩国、德国及中国台湾地区7个地区的1%~100%的人体模型,并没有大陆地区的人体模型,因此选用了台湾地区成年男性人体模型。模型重要尺寸主要来源于相关国际标准,按经验选取的数据不会影响其可靠性与准确性[18]。根据实际H点的位置坐标,将驾驶员三维人体模型在驾驶室中进行定位,建立拖拉机驾驶室的人机系统模型,如图3所示。
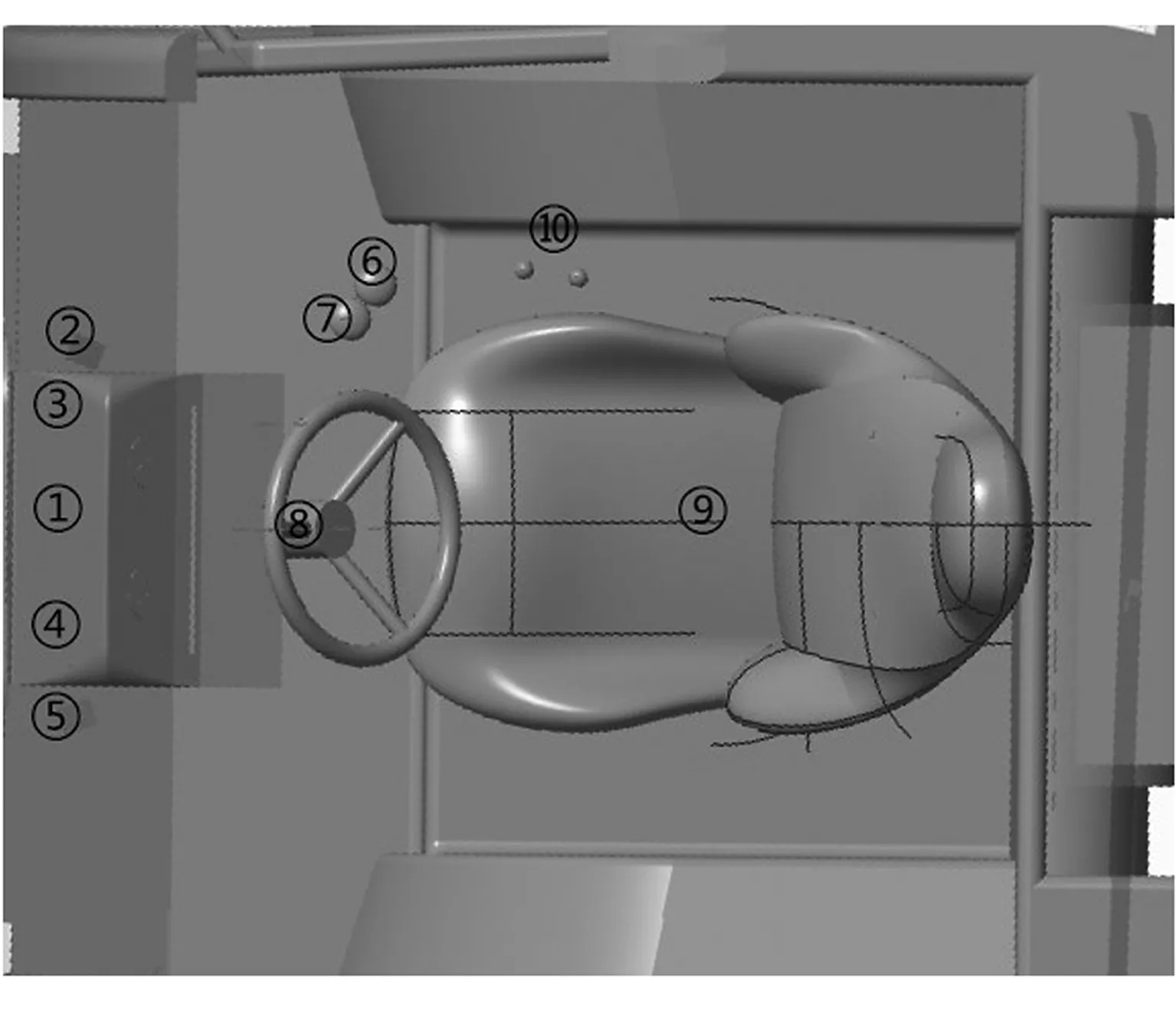
1.仪表盘 2.油门 3.刹车(被仪表盘遮挡) 4.离合器(被仪表盘遮挡) 5.刹车(制动后轮,功能与手刹类似) 6.副变速杆 7.主变速杆 8.方向盘 9.座椅 10.提升器操作手柄

图3 驾驶室的人机系统模型
2 驾驶室的人机工程学评价
2.1 操纵舒适性的评价
CATIA软件可以进行RULA 分析,即评价在一定的坐姿条件下的驾驶员手的操作舒适度。RULA(Rapid Upper Limb Assessment)通过评分判定方式分析人体实际的身体机能和上肢的运动极限[19]。RULA分析结果为1~7,越小的分数表示舒适性越好,数值为1或2表示可以接受的值,数值为3或4表示需要进一步调查的值,数值为5或6表示需要进一步调查和尽快修改,数值为7表示需进一步调查并进行立即修改。
在RULA分析中,可选用的驾驶状态有静止、间歇及频繁3个状态,分析选项则有手臂是否得到支撑、是否穿过身体中线及检查平衡3个选项,如图4所示。

图4 RULA分析界面
在平时驾驶拖拉机时,驾驶员不可能完全静止,时常需要进行相关操作,但即使如此驾驶员也不可能进行频繁的操作活动,因此在状态选择中勾选了『间歇』状态;在操作方向盘、仪表按钮甚至操作变速杆时,手臂是否得到支撑,关乎到操作是否舒适,因此勾选了『手臂是否得到支撑』这个可勾选项。
根据实际操作情况设置不同的操作任务,如图5所示;进行操作舒适性的评价,结果如表1所示。
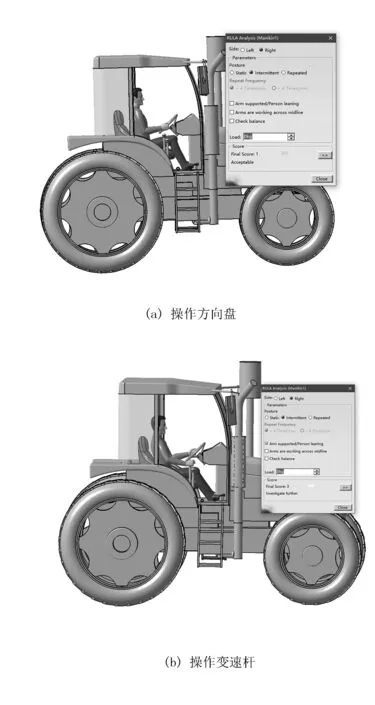

图5 不同操作任务下的舒适性分析

驾驶任务人体模型5%50%95%操作方向盘1/12/23/3操作前控台1/21/22/2操作变速杆2/42/32/2操作提升器杆2/22/21/2
前面表示左手的RULA分析分数,/后面表示右手的RULA分析分数。
由表1数据可以看出:驾驶室整体操纵的舒适性较好;但第95%驾驶员在双手操纵方向盘时RULA值为3,舒适性一般,需要进一步的调查和改进;第5%、50%驾驶员在操纵变速杆时右手的RULA值分别为4和3,舒适性一般,需要进一步的调查和改进。
2.2 操纵可达性仿真
利用CATIA软件人机工程模块中的手伸和界面计算功能,对坐姿下的左右手可达性进行仿真。图6为第50%驾驶员的仿真结果,阴影部分为坐姿状态下左右手可达区域。由图6可以看出:左右手可达范围基本覆盖两侧所有操作装置,说明第50%驾驶员对操纵台适应性良好;对于第95%驾驶员来说,由于较50%高大,可达区域更大,仿真结果更优;对于第5%驾驶员,由于臂长较短,可达区域稍小,但依然能覆盖所有操纵元件。

图6 驾驶员可达性仿真
2.3 驾驶员视野评价
视野的良好与否对驾驶员的安全驾驶有直接影响。GB/T3871.7-2006《农业拖拉机试验规程》中的第七部分[20]有详细的试验步骤测试驾驶员视野,阐述了驾驶员视野要求的标准。驾驶室的视野性能如果通过试验方法来确定,试验条件要求高且耗时长,所以在拖拉机的设计过程中通常的做法是应用一些理论方法评价驾驶室的视野性能[21]。本文利用CATIA人机工程模块中的视野工具,视野的评价是通过对人体模型的头部和躯干部分的转动控制来实现的。
第50%驾驶员的视野评价结果如图7所示。其中,白色椭圆部分表示双眼可见区域,灰色阴影部分表示单眼可见区域,黑色部分表示不可见区域。由图7可知:正面视野中,驾驶室的左右两个立柱产生了两个视野盲区,这是不可避免的,在设计时将空气滤清器和消音器设计在立柱产生的视野盲区中,将最大限度得减小视野盲区;前方路面、仪表、踏板、左右两侧外界区域及后视镜皆在人体可视视野内,设计合理。

图7 驾驶员视野仿真
3 驾驶室操纵舒适性的调查与评价
拖拉机驾驶员的劳动强度大、环境恶劣、工作时间较长,操纵舒适性对于驾驶员来说非常重要。所以,在拖拉机设计过程中要充分利用人机工程学的原理,将使用频率高的操纵部件布置在驾驶员舒适的操纵空间内,如方向盘、变速杆、提升器操纵手柄及控制台等。为此,对东方红LX-1204型拖拉机进行操纵舒适性的调查与评价。
3.1 调查对象
调查时间为2016年12月,以问卷调查与访谈结合的形式进行,设计两个调查表格,共140份(筛选过)。驾驶员特点包括:经验丰富的驾驶员(超过10年驾龄),工作时长超过8h,多数人有夜间驾驶的情况。由于有些参与调查的驾驶员存在乱填调查表现象,故调查表经过筛选。
3.2 拖拉机驾驶室操纵舒适性评价指标体系
根据拖拉机驾驶员的实际需求,在理论研究和实际调查的基础上,构建一个拖拉机驾驶室操纵舒适性评价的指标体系,评价指标为6大项、18条评价因素,如图8所示。
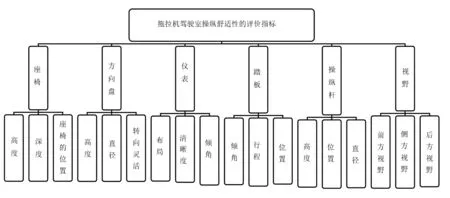
图8 拖拉机驾驶室操纵舒适性评价指标体系
3.3 评价方法
1)层次分析法( Analytical Hierarchy Process,简称 AHP 方法)是美国运筹学家 A.L.Saaty 提出来的,是定量与定性相结合的决策分析方法,可使决策者对复杂系统的决策思维过程进行模型化、数量化[22]。AHP方法的基本步骤:①建立系统层次结构模型,如图8所示;②构造各层次判断矩阵;③单一准则下的指标元素相对权重计算;④计算判断矩阵的最大特征根;⑤判断矩阵的一致性校验。
2)模糊数学利用数学方法处理具有“模糊性”现象的数学。模糊综合评价以模糊数学为基础,定量化一些模糊因素,进而进行综合评价的一种方法。其评价的基本思路从定性研究开始,经定量计算和处理,最终得出定性的评价结果[22]。
模糊综合评价法的基本步骤:①确定影响评价的因素,如图8所示。②确定评语级,将驾驶室操纵舒适性分为5非常舒适、4舒适、3基本舒适、2不舒适、1非常不舒适5个等级。③构建模糊关系矩阵R=(rij)m × n。其中,rij含义是U的第i个因素ui对立与评价等级V中第j个等级vj的隶属度。④利用层次分析法确定评价因素的权重A=(a1,a2,…,ap)。⑤计算合成算子B’=AR。⑥归一化评价向量B=(b1,b2,…,bm),利用其元素形成权数,对各个评语等级的得分进行加权平均,最后得到总评分。
根据调查结果,利用层次分析法和模糊综合评价法结合,具体分析过程见项目组的论文,即参考文献[23]。
3.4 结果分析
归一化后B=[0.100,0.323,0.432,0.137,0.008],B乘以5个等级(5、4、3、2、1)得到总评分数为3.375,处于舒适和基本舒适之间。二级指标项目中,分数最低的是座椅、方向盘和操纵杆,分数为3.176,3.390,3.453,都处于舒适和基本舒适之间。在CATIA操纵舒适性评价仿真中,第95%驾驶员操纵方向盘时RULA值为3,第5%和50%驾驶员操纵变速杆时的RULA值分别为4和3,说明方向盘和变速杆的操纵舒适性一般,需要改进。调查评价的结果和仿真的结果基本一致。
4 驾驶室的优化设计
通过上述的仿真和调查评价可知:东方红LX-1204型拖拉机驾驶室操纵舒适性基本舒适,可达性符合设计要求,视野良好。根据所做分析,方向盘和变速杆可以进一步进行优化:
1)方向盘的优化设计。拖拉机驾驶员在驾驶拖拉机时需要时刻把持方向盘,因此是驾驶员接触时间最长的操纵装置,其设计好坏对驾驶员的舒适性和工作效率影响非常大。方向盘立柱中心线与垂直方向夹角由35°调整到30°。GB/T 6235-2004《农业拖拉机驾驶员座位装置尺寸》规定在在0°~40°范围内选取 ,符合要求。方向盘的改进后对驾驶员的俯视视野也产生了影响,如图9所示。改进后,方向盘对踏板的遮挡变小,视野状况变好。

图9 改进前后驾驶员的俯视视野
2)变速杆的优化设计。操纵杆的舒适度一般受杆长及杆所在位置影响。大型轮式拖拉机设计中,为了便于驾驶员在坐姿操作时推拉方向用力,操控手柄一般与驾驶员的肘部高度相等[24]。所以,杆长不进行改动,把变速杆位置进行改进,将主副变速杆沿Y方向向左移动30mm。
经过上述优化后,重新进行RULA分析,结果如表2所示。对比表1和表2可以看出:改进后不同百分位的驾驶员操作方向盘、前控台、变速杆及提升器杆时RULA数值都为1或者2,操纵舒适性变好。
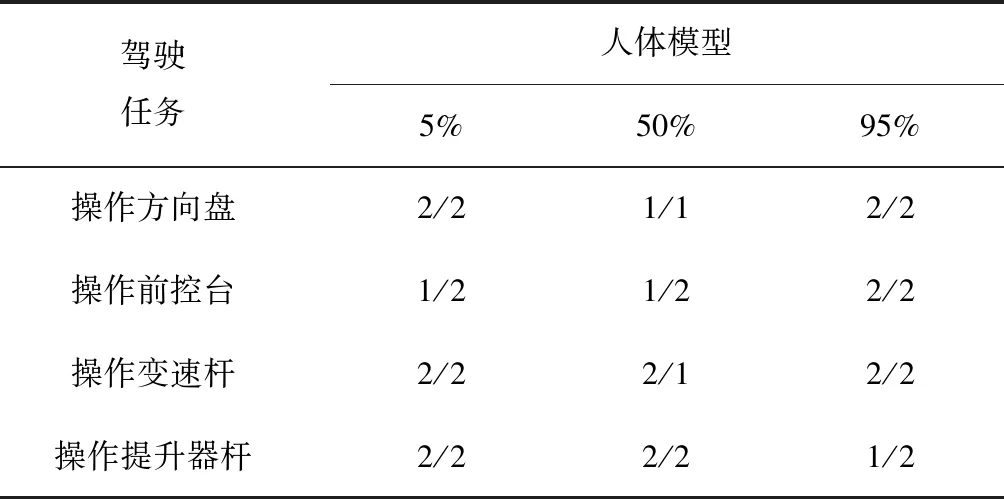
表2 驾驶室改进后的RULA分析结果
5 结论
1)以东方红LX1204型拖拉机驾驶室为研究对象,采用Creo3.0创建驾驶室三维模型,通过GB/T6235-2004《农业拖拉机驾驶员座位装置尺寸》中 SIP 的推荐范围和美国SAE 推荐的适意H点位置曲线结合来确定实际的H点,以CATIA 软件平台为基础,对人体模型进行定位,建立拖拉机驾驶室的人机系统模型。
2)利用CATIA软件的人机工程模块,对第5、50、95百分位驾驶员进行操纵舒适性评价、可达性及视野进行仿真,结果表明:驾驶室可达性符合设计要求,视野良好,操纵舒适性一般;操纵方向盘和变速杆时,RULA值为3或者4,需要进一步的调查和改进。
3)调查拖拉机驾驶室的操纵舒适性,从方向盘、座椅、仪表、踏板、操纵杆及视野6个方面构建操纵舒适性评价指标体系,利用层次分析法确定各因素的权重,接着采用模糊评价法进行多级模糊综合评价,最终确定驾驶室操纵舒适性的评价等级,处于舒适和基本舒适之间。分数最低的分别是座椅、方向盘和操纵杆,操纵舒适性一般。调查评价的结果和仿真的结果基本一致。
4)对驾驶室的方向盘和变速杆进行优化设计,方向盘立柱中心线与垂直方向夹角由35°调整到30°,将主副变速杆沿Y方向向左移动了30mm。改进后,方向盘对踏板的遮挡变小,俯视视野良好,不同百分位的驾驶员操作方向盘、前控台、变速杆、提升器杆时RULA数值都为1或者2,操纵舒适性变好。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年5期)2022-04-02
载人航天(2021年5期)2021-11-20
现代仪器与医疗(2021年2期)2021-07-21
汽车实用技术(2021年10期)2021-06-04
汽车实用技术(2018年10期)2018-06-01
消费者报道(2016年3期)2016-02-28
汽车文摘(2015年11期)2015-12-14
第二课堂(课外活动版)(2015年6期)2015-10-21
销售与市场·管理版(2015年5期)2015-05-05
