
农业自动导航系统移动试验平台的研制
2019-05-24 06:22:10杨自栋金诚谦
农机化研究 2019年12期
印 祥,杨自栋,金诚谦,3,杜 娟
(1.山东理工大学,山东 淄博 255000;2. 浙江农林大学,浙江 临安 650201;3.农业农村部 南京农业机械化研究所,南京 210014)
0 引言
当前,农业自动导航系统主要满足于田间直线行驶的需求,随着农业生产规模化和精细化的不断发展,农业机械要求自动导航系统具备田间道路自动跟踪、地头自动转弯、自主避障和路径自动规划等一系列功能,是实现农业机械无人驾驶的前提和基础,也是农业自动导航领域的研究热点[8-10]。为了验证导航控制算法、评价导航系统的稳定性和导航精度,需要进行大量的田间试验。若采用拖拉机、联合收获机等大型农业机械进行导航试验测试,在机械日常维护保养、控制系统研制、试验材料等方面的成本较高。
针对导航试验成本较高的问题,本文研制了一种使用成本较低、便于操作与控制的农业自动导航系统移动试验平台。基于CAN总线通信网络,该试验平台能够接收农业自动导航系统的控制指令,完成自动转向、自动巡航及前进后退自动切换等基本操作。
1 试验平台构成
以一台四轮电动车为平台原型,结合其机械执行机构和电气操作系统的功能特点,研制出了农业自动导航系统移动试验平台,如图1所示。

图1 试验平台构成
该试验平台主要包括自动转向系统、自动巡航系统、自动操作系统、数据处理与显示终端、CAN总线通信网络及其预留接口等。
自动转向系统通过CAN总线接收转向指令,将前轮转动至指定角度;自动巡航系统根据速度指令,控制驱动电机的转速以保持指定的行驶速度;数据处理与显示终端用以发送或接收CAN总线数据,对试验平台的工作状态进行实时监测;待测试的农业自动导航系统通过CAN总线预留接口向试验平台其它子系统发送控制指令,实现转向、速度、前进后退等基本功能的自动控制。
2 控制系统设计
2.1 自动转向系统
自动转向系统接收农业自动导航系统发出的转向指令,控制前轮转动至所期望的角度,控制原理如图2所示。系统主要包括转向控制器、电机驱动器、转向电机、角度传感器及转向机构等。
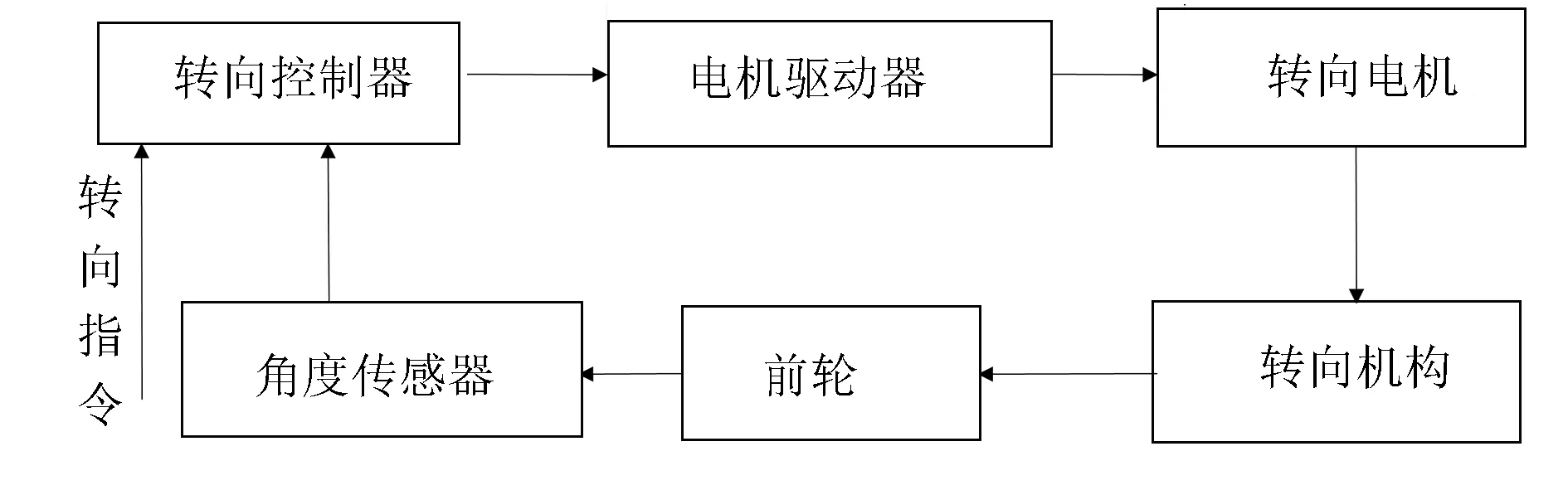
图2 自动转向原理框图
为保证转向机构的结构紧凑,采用电动助力转向管柱代替试验平台原有的转向管柱,如图3所示。以其上所具有的12 V、270 W直流有刷电机作为转向电机,通过蜗轮蜗杆传动总成减速增扭以提供足够大的转向力矩,转向管柱的动力输出轴通过万向节与转向器的输入轴联接。

图3 自动转向机构
角度传感器采用阻值为5Ω的精密导电塑料电位器,测量角度范围是0°~180°,用于测量前轮的转向角度。采用联轴器和软轴将转向立柱和角度传感器的输入轴联接,车轮转向时角度传感器的输出值能够直接反应其转向角度,如图4所示。
把所有护士在考核期间得到的数据用SPSS 19.0统计学软件进行处理分析,计量资料用均数±标准差表示,比较用t检验,差异显著(P﹤0.05)时,表示有统计学意义。
转向控制器以PIC18F458单片机为核心,具有CAN总线收发、RS232串口通信、A/D转换及D/A转换等功能,能够接收并识别出CAN总线上的转向指令,同时读取角度传感器的数值。将设定角度和实际角度进行比较,采用如图5所示的数字PID控制算法计算转向电机的旋转方向和旋转速度,向电机驱动器发送相应的控制信号,使转向机构动作以带动前轮转向。
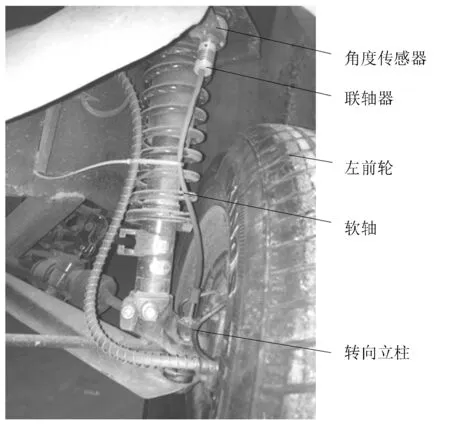
图4 角度传感器安装

图5 转向控制算法
2.2 自动巡航系统
在田间行驶过程中,因地面崎岖不平、土壤紧实度不同,作业车辆所受地面阻力不断变化,导致其行驶速率变化较大。为保证车辆以所期望的速度正常行驶,需要实时调整其动力输出。自动巡航系统主要包括速度控制器、驱动电机控制器及车速传感器等,如图6所示。

图6 自动巡航系统
车速传感器采用600线增量式光电编码器,将其输入轴与左后轮的旋转中心联接。当车轮转动时,输出脉冲至速度控制器,如图7所示。
在不考虑打滑的前提下,试验平台的实际行驶速率Sa为
(1)
其中,D为轮子直径;N为编码器线数;T为采样间隔时间;P为T时间内的脉冲数。

图7 自动巡航系统
速度控制器接收并识别CAN总线上的车速指令,计算实际车速Sa与期望车速Sd的差值e(i),采用如公式(2)计算并输出合适的模拟电压信号至驱动电机控制器,以保证移动试验平台维持既定的车速。
Vi+1=Vi+kPe(i+1)+kI[e(i+1)-2e(i)+e(i-1)]+kD[e(i+1)-e(i)]
(2)
其中,KP、KI、KD分别为PID数字控制器的比例、积分、微分项的3个参数,在试验测试时根据试验平台的动态性能进行调整。
2.3 自动操作系统
在田间作业过程中,除转向和变速外农业机械需要具备前进、后退、刹车等基本功能。为此,本文在车辆原有电气操控系统的基础上,开发了自动操作系统,主要包括自动控制单元、继电器及手自动切换开关等,如图8所示。

图8 自动操作系统
图8中,K1、K2、K3为车辆原有手动开关,R1、R2、R3为继电器开关,Q1、Q2、Q3为手动自动切换开关。驱动电机控制器的3个端口D0、D1、D2分别为前进、后退、刹车控制端口,当端口接通高电平+5V时,执行相应的操作。在自动控制模式下,自动控制单元接收并识别CAN控制指令,通过数字I/O口向继电器Q1、Q2、Q3的控制端发送高/低电平信号,以接通继电器开关R1、R2、R3,完成前进、后退、刹车等功能的自动控制。
3 试验测试与结果分析
将本文所研制的自动控制装置集成到试验平台上,以工控电脑作为数据处理与显示终端,进行了自动转向、自动巡航等系统的试验测试,对试验平台综合性能进行评价。
3.1 自动转向测试
自动转向试验的目的是测定一系列转向指令下前轮的转向角,获得车轮实际转向角与数字指令间的关系曲线,对转向系统进行标定,以提高其转向控制精度。如图9所示,将划线杆固定于左前轮安装盘上,通过工控电脑向CAN总线发送一系列转向指令,同时将前轮的实际转向位置记录于A0图纸上。

1.角度传感器 2.联轴器 3.软轴 4.前悬挂 5.安装盘 6.划线杆
自动转向的测量记录如图10(a)所示。因A0图纸上的测量线条较多且分布密集,相邻线条之间的夹角用量角器无法准确测量其角度。本研究中,采用扫描仪将测量图纸扫描成图片,将扫描图片导入CAXA制图软件中,用直线命令对图片上的线条进行逐一描绘,用CAXA标注角度命令标注所有线条与0°线之间的角度,结果如图10所示。
本研究中,车轮右转角度值为正,左转角度值为负。最后,将CAXA中的角度值输出并保存至文件中,得到了转向角测量的全部数据。角度测量曲线如图11所示,其回归方程为Y=-0.29X+42.0。角度分辨率最大为0.4°,最大误差为1.0°。由此可以看出,自动转向系统的控制精度和线性度能够满足农业自动导航系统测试的基本要求。

图10 自动转向测试

图11 角度测量曲线和回归曲线
3.2 自动巡航测试
自动巡航测试的主要目的是评价试验平台在自动行走时能否维持设定的车速及车速控制的稳定性。试验过程中,由工控电脑向CAN总线发送一系列车速指令,并通过其RS232串口实时接收并记录速度控制器输出的实际车速测量值,从而得到每个车速指令所对应的实际车速。图12所示为速度理论值Sd和实际车速Sa平均值的比较曲线,其最大误差为0.3m/s。因此,自动巡航系统能够以较高的精度保持试验平台以设定车速自动行驶。

图12 自动巡航测试
4 结论
1)采用直流电机作为动力源、角度传感器作为前轮转向角度反馈单元,以PIC18F458单片机为转向控制核心,研制了电动自动转向系统。采用增量式编码器测量行驶速度,以数字PID算法为基础,完成了自动巡航系统的开发。
2)在保留试验平台手动操作功能的前提下,采用并联继电器的方式,由自动控制单元的数字I/O口控制继电器开关,实现了试验平台基本操作功能的自动控制。
3)试验测试表明:所研制的农业机械自动导航移动试验平台能够接收CAN总线上的转向指令和速度指令,完成试验平台的自动转向和自动巡航,在控制精度和可靠性方面能够满足农业机械自动导航系统测试的基本要求。
猜你喜欢
科普童话·神秘大侦探(2023年1期)2023-05-30 12:48:10
中学生数理化·八年级物理人教版(2020年11期)2020-12-14 06:58:24
测控技术(2018年5期)2018-12-09 09:04:26
电子测试(2018年18期)2018-11-14 02:30:34
中学生数理化·八年级物理人教版(2018年4期)2018-06-27 08:08:02
汽车维护与修理(2018年1期)2018-04-04 01:13:22
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
百科探秘·航空航天(2016年9期)2016-12-01 03:04:14
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33
