
东莞地铁R2线高架桥用DP50/30型节段拼装架桥机的研制与应用
2019-05-22 03:25周治国陈德利
铁道建筑技术 2019年12期
代 宇 周治国 陈德利
(郑州新大方重工科技有限公司 河南郑州 450064)
法国学者E.Freyssinet在1945~1948年首次采用预制节段施工法进行预应力混凝土桥梁施工,使预应力技术得到更大发展[1-4]。我国改革开放后,国外先进技术得到国内工程技术人员的接受和推崇,文明、环保、社会效益好的施工理念也受到政府的青睐。预制节段拼装施工技术、体外预应力技术和先进架桥设备技术的完善和标准化,使我国预制节段拼装施工技术得到创新发展和广泛应用,尤其是在国内的一些发达城市被率先应用,如上海浏河大桥[5]、广州地铁4号线[6]高架桥部分。
1 项目概况
东莞市城市快速轨道交通R2线2312标区间高架段在线路升出地面后,沿S256路中南行,与S256规划的白濠立交并行780 m后,在东莞虎门站前斜跨S256和穗莞深城际轨道交通左线隧道,下穿广深港客运专线铁路桥后到达虎门站,站后沿S256路侧设站后折返。标准双线简支梁设计跨度为25 m和30 m,支座中心距梁端0.55 m,梁体顶宽均为9.2 m,梁高均为1.8 m,腹板为斜腹板,其倾斜度为1∶3.421。标准节段长度为2.5 m,最大单块重量60 t。跨度25 m梁共10段,总重约400 t;跨度30 m梁共12段,总重约500 t。
2 架桥机组成及施工原理
架桥机主梁两跨式布置[7],设置支腿4套,分别为1号腿、2号腿、3号腿及4号腿,其中1、2号支腿墩顶站位,3、4号支腿桥面站位,另在两条箱梁腹内布置起重天车一套,主梁上方布置端吊挂2套(前、后两端)、中吊挂10套(见图1)。

图1 架桥机总体组成
2.1 主要技术参数
跨度:30 m
最大节段块重量:50 t
整孔重量:500 t
线路纵坡:2%
最小平曲线半径:600 m
喂梁方式:桥下、桥面
通过限高高度:5.3 m
返向施工:有(架桥机桥面自行调整实现)
2.2 施工原理
2.2.1 架梁
由2、3号支腿支撑桥机及混凝土梁荷载,2号支腿墩顶站位,3号支腿在桥头站位,运梁车按施工组织逐块将节段块运至施工跨下,由天车依次提梁,并将荷载转移至中、端吊挂上(吊挂高度位置如图1所示),所有节段块吊装完成后进行节段块之间的预拼、涂抹环氧树脂、临张、终张等各个工序[8-9],最后由两端吊挂将张拉完成的简支箱梁下落至墩顶完成一孔梁的施工架设。
步骤一:架桥机依次提起各个节段,调整各节段姿态,涂抹环氧树脂、临时张拉后整孔张拉成桥(见图2)。

图2 步骤一
步骤二:利用端吊挂落梁到位,架桥机具备过孔条件,各支腿转换为过孔模式(见图3)。

图3 步骤二
2.2.2 过孔
架桥机过孔过程无需桥面铺设轨道,由2、3号支腿上方与主梁相接触的托辊机构推动主梁纵移过孔,过程中需要由1、4号支腿分别在墩顶及桥面辅助支撑用于2、3号支腿的位置倒换。
步骤一:脱空架桥机4号支腿,2、3号支腿推动架桥机向前纵移,1号支腿到达前方墩顶位置后支撑1、4号支腿,天车纵移至3号支腿上方(见图4)。

图4 步骤一
步骤二:4号支腿利用桥面钢筋布置锚索,脱空3号支腿,天车提起3号支腿向前纵移一跨,到达下一施工位支撑(见图5)。

图5 步骤二
步骤三:天车纵移至2号支腿上方并与其可靠连接,脱空2号支腿后,天车携2号支腿向前纵移穿过1号支腿至前方墩顶支撑站位(见图6)。
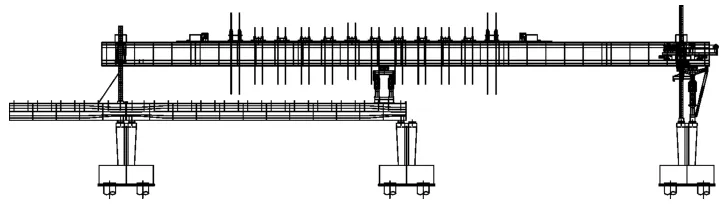
图6 步骤三
步骤四:拆除4号支腿锚索,脱空1、4号支腿,利用液压系统横向打开1号支腿下方横梁避开2号支腿,架桥机在2、3号支腿的推动下再次整机纵移至下一施工位,安装2、3号支腿与主梁间的锚固装置,架桥机准备提梁(见图7)。

图7 步骤四
3 项目施工难点
由于本项目位于市区省道路中,施工条件复杂,架桥机设计过程中存在诸多难点,而其中最为突出的几点如下:
(1)城市轨道交通高架桥梁,桥梁预留钢筋密集,无法铺设桥面轨道。
(2)墩顶几何尺寸小,支腿与墩顶无锚固位置。
(3)根据施工组织要求,要求架桥机具备反向施工功能,由于施工线路位于S256公路路中,两侧车流量极大,无法配置辅助吊装设备辅助桥机调头,故要求架桥机能够完全自助实现施工方向的调整。
(4)本项目线路下穿广深港客运专线铁路桥,既有桥底面与本线路桥面间高度5.3 m,架桥机正常施工高度为8.2 m,为此,要求架桥机能够自行降低2.9 m通过该限界,并自行恢复正常施工状态。
4 关键技术
施工桥梁为城市地铁高架桥,处在省道中间,路面交通繁忙,桥梁自身存在桥面钢筋密集、墩顶几何尺寸小支腿站位困难等特点,同时根据施工组织及道路保通要求,架桥机需要自行调头、通过限高。如何克服这些客观存在的限制条件,同时保证施工效率及人、机安全成为架桥机设计成败的关键。
4.1 支腿桥面站位
桥梁上平面预留有密集的轨道安装用钢筋,架桥机3、4号支腿桥面支撑位置主动避开了桥面钢筋,对桥面影响降至最低;另外,架桥机过孔无法在桥面铺设轨道,为此桥机在2、3号支腿上方布置托辊[10],主梁下方布置托辊运行轨道(矩形钢板),架桥机利用托辊推动架桥机纵移过孔。
4.2 支腿墩顶站位
桥梁为简支架设,墩顶几何尺寸小,无法满足1、2号支腿同时在墩顶前半部分站位,为此桥机设计1、2号支腿过孔过程中分别在墩顶后、前方站位。1号支腿为矩形结构(见图8),净空满足2号支腿通过;下方横梁可横向打开,可在2号支腿支撑时纵向穿过达到架桥机支腿墩顶站位的需求。2号支腿作为架梁承载及过孔动力来源,其自身的稳定性至关重要,由于墩顶位置空间小,无法设置有效锚固装置,2、3号支腿推动主梁纵移过程中如出现速度偏差,亦会导致2号支腿倾翻,为此将2号支腿设计为三角形结构(见图9),保证其架梁工况下的自身稳定,同时在其前方斜撑杆的上下两端布置轴销式载荷限制器,过孔过程中如2、3号支腿托辊速度不一致,轴销式载荷限制器承载,荷载在允许范围内时架桥机继续过孔,如超过设计范围则自动报警直至自动停机以保证设备安全。

图8 1号支腿通过2号支腿

图9 2号支腿
4.3 架桥机反向施工
根据施工组织需要,要求架桥机能够实现反向施工,在调整施工方向时,由于道路保通要求,无法利用辅助吊机配合,为此,架桥机主框架设计为纵横向全对称结构[11],1、4号支腿除1号腿下横梁外结构型式全部一致,调整施工方向前架桥机退至已架好的梁面上,1、4号腿支撑,布置锚索,2、3号支腿可在1、4号支腿支撑时,利用天车将其相对位置进行倒换并旋转180°实现架桥机反向施工(见图10)。

图10 架桥机反向施工示意
4.4 架桥机通过限高
为满足架桥机通过限高要求,架桥机起升天车布置在主梁巷内,有效压缩了整机高度,利用天车吊具配合手动穿心顶调整各节段姿态,显著降低了吊具高度(传统吊具是利用旋转吊具下布置调整油缸),另外在架桥机通过限高前,架桥机桥面站位后,在1、4号支腿布置锚索[12],利用天车拆除2、3号支腿托辊以下的支撑结构(拆除部分在主梁下妥善布置),利用1、4号支腿作为升降架降低、升高整机高度,实现架桥机通过限高并在通过限高后恢复架梁高度(见图11)。

图11 架桥机通过限高现场照片
5 结论
本架桥机在东莞地铁R2线应用后,同类型架桥机又在上海地铁5#号线[13-14]、广州地铁14#号线等项目上应用,充分体现了本机型的安全性、通用性等特点。
随着节段拼装工法从沿海发达城市到内陆的不断推广(南昌市政高架、郑州四环高架等),对应工法的节段拼装架桥机需求量将不断加大,而本机型将为后续节段拼装架桥机的设计、制造提供强有力的理论支持及实践。
猜你喜欢
铁道标准设计(2022年11期)2022-11-16
铁道建筑技术(2022年9期)2022-09-30
设备管理与维修(2022年4期)2022-03-21
城市道桥与防洪(2022年1期)2022-02-25
现代制造技术与装备(2022年1期)2022-02-21
煤气与热力(2021年6期)2021-07-28
科学技术创新(2021年14期)2021-05-28
山东交通科技(2021年6期)2021-03-01
中国科技纵横(2020年5期)2020-06-29
山西建筑(2020年5期)2020-03-20
