一种分布式螺旋桨运输机方案及其滑流效应研究
2019-05-15 03:16杨小川李伟王运涛王昊岳皓黄江涛
西北工业大学学报 2019年2期
杨小川, 李伟, 王运涛, 王昊, 岳皓, 黄江涛
(中国空气动力研究与发展中心 计算空气动力研究所, 四川 绵阳 621000)
目前,电推进技术[1-3]逐渐在汽车、火车、飞机等传统运输领域获得发展,特别是油电混合汽车、纯电动汽车、高铁动车等早已投入市场,并取得广泛关注。而航空飞行器对飞行重量及推重比、能源能量密度、动力安全余度、发动机可用功率等指标要求高,因此电推进在航空领域的工程应用仍处于初级阶段,应用于纯电动或油电混合动力中小型飞行器的分布式螺旋桨推进技术已成为航空研究新热点。
为充分研究飞行器分布式螺旋桨推进技术,NASA早在2014年开始分布式螺旋桨相关技术研究[4-6],主要从单独螺旋桨电推进试验台、前缘异步螺旋桨技术(LEAPTech)、混合电力集成系统铁鸟测试(HEIST)以及可扩展融合电推进技术和运营研究(SCEPTOR)4个阶段开展工作,最终将通过新航空地平线(NAH)计划的资助,完成X-57分布式螺旋桨电推进验证机的试飞验证工作。
关于分布式螺旋桨推进技术,目前国内外相关风洞试验和数值模拟研究相对较少。Stoll等[7]通过作用盘模型对LEAPTech方案进行数值模拟,该方案主要验证分布式螺旋桨技术,在大展弦比机翼前缘共布置18个高升力螺旋桨。通过对着落构型进行定常滑流数值模拟研究,得到机翼最大升力系数达到5.2;Patterson等[8]认为分布式电动螺旋桨主要有翼尖螺旋桨、高升力螺旋桨和机身边界层消除螺旋桨3类,并重点对X-57飞机起降等低速飞行阶段使用的分布式高升力螺旋桨进行研究。
此外,在螺旋桨滑流数值模拟方面,方法较多。从数模类型上,Veldhuis等[9]将螺旋桨滑流计算分为作用盘模型(actuator disk)和完整桨叶模型(blade modeling)2种;另外,从坐标系选取上,一般存在惯性坐标系、非惯性坐标系和多参考坐标系3类;从求解方式上,有定常、准定常和非定常3种求解方法。
在各类滑流数值模拟方法中也存在一定联系,作用盘模型[10-13]一般用于惯性坐标系下的定常计算,如李博等[10]采用等效盘替代真实螺旋桨,对某四发涡桨飞机进行机翼滑流影响研究;完整桨叶模型结合非惯性坐标系的准定常计算,多用于单独桨叶模拟,即轴对称流动且多体之间无相对运动;完整桨叶模型结合多参考坐标系的准定常计算,多用于某一相位角下的螺旋桨滑流影响研究,如张小莉等[14]分别采用基于多参考坐标系的准定常和非定常方法,对机翼增升装置滑流效应进行研究;完整桨叶模型结合多参考坐标系/惯性坐标系的非定常计算[15-19],一般用于多体间存在相对运动的非定常滑流效应研究,如Roosenboom等[15]采用非定常方法对某四发涡桨运输机滑流效应进行分析,并与PIV试验结果进行对比。这些方法各有优缺点,如作用盘方法能进行螺旋桨性能和滑流效应的快速计算评估,而非定常方法则能更精细地获得螺旋桨流动特点以及非定常滑流效应,需根据所关注问题以及计算代价来进行权衡。
综上所述,本文初步提出了一种分布式螺旋桨电推进运输机方案,并基于自主研发的“亚跨超CFD软件平台”(TRIP3.0)[20],通过将等效盘替代分布式螺旋桨,完成该机低空低速大拉力状态下的有无滑流全机气动特性分析,并对分布式螺旋桨布置方案以及分布式螺旋桨下机翼流动特性进行探索研究。
1 等效盘模型
为了简化真实螺旋桨对气流的加速加旋影响效果,达到快速工程评估计算目的,文中采用等效盘模型的无厚度圆盘代替真实分布式螺旋桨,获得近似真实螺旋桨的滑流效果,达到评估机翼等部件滑流影响效果及规律的目的。
该方法将叶片旋转区域简化为无厚度的圆盘,从盘面前流入、盘面后流出的气流经过时间平均、稳态近似来模拟真实桨叶工作,即经过盘面的气流具有和桨叶类似的加速加旋效果,且不同迎角和侧滑角的盘前来流均能通过盘面坐标转换进行模拟。图1给出了等效盘模型的基本原理示意图。
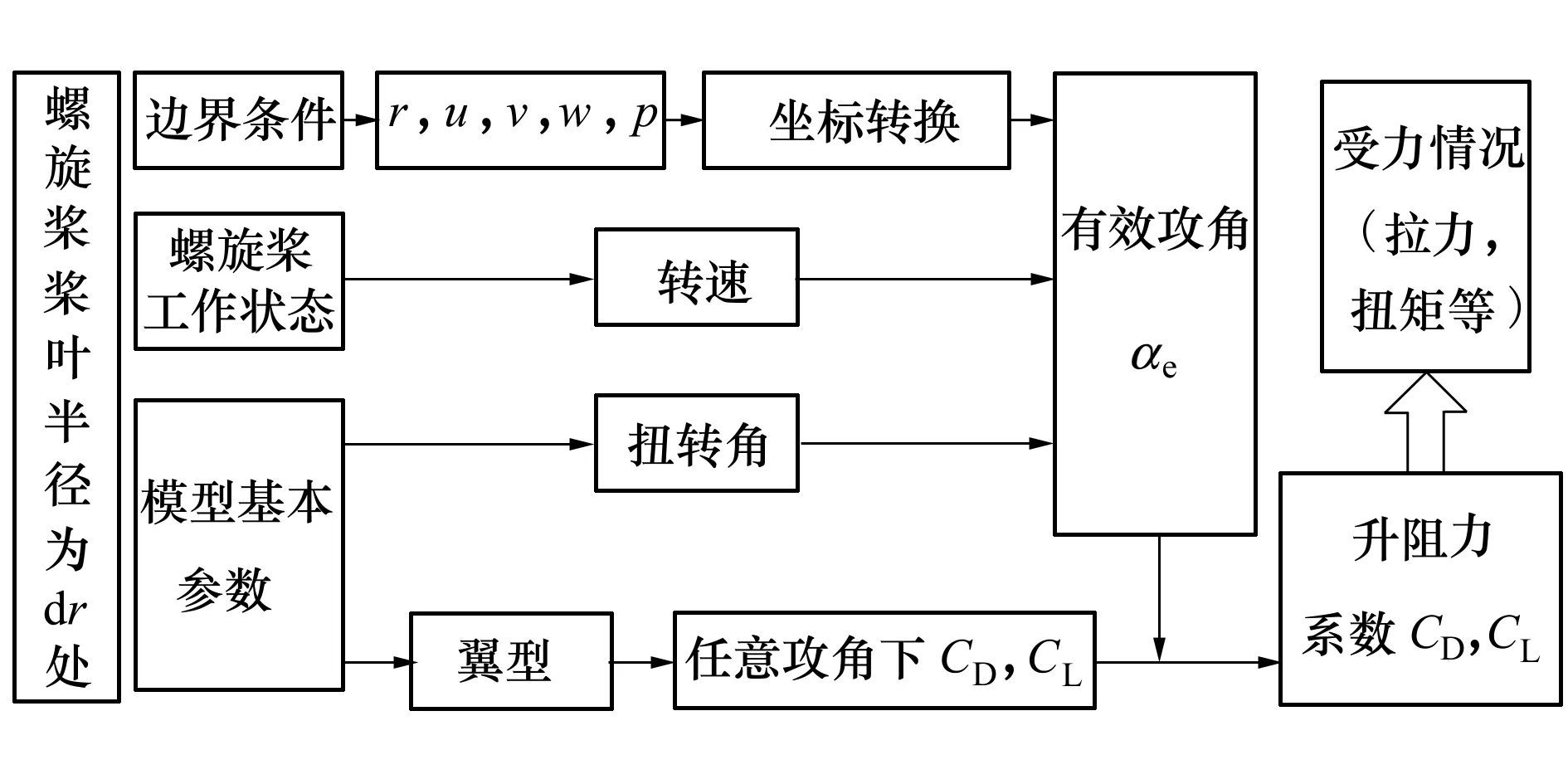
图1 等效盘模型原理示意图[18]
为了检验CFD计算软件的合理性和准确性,文献[13,18]均对该方法进行了详细的螺旋桨算例验证。
2 研究对象
该机定位于20 t级轻型有人或无人军民两用运输机,载重能力在6 t左右(装载轻型战车或商用货物等),且具备野战机场或简易跑道短距起降能力,以及近地空投能力。
图2给出全机外形示意图,该机采用上单翼V尾常规布局,两侧机翼前缘对称布置5个电动螺旋桨,螺旋桨旋转方向如图3所示,其中螺旋桨可变总距,桨叶直径2.4 m,单个螺旋桨包含3片桨叶。全机翼展25.8 m,机长15.5 m,不含起落架机高6.0 m,机翼面积55 m2,其中机身最大宽度4.0 m,货舱尺寸长宽高分别为(4.0~6.5)m×2.7 m×2.3 m,如图4所示。

图2 分布式螺旋桨推进运输机示意图

图3 分布式螺旋桨旋转方向示意图
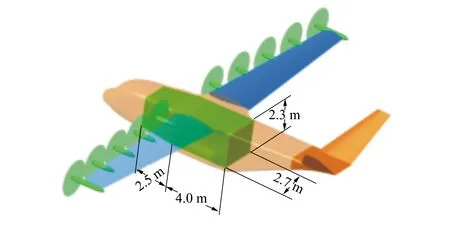
图4 货舱尺寸示意图
动力采用油电混合方式,涡轴发动机为双发设置,提高安全性。发动机位于机尾上方,置于V尾中间,避免地面异物被发动机吸入。单台功率达1 000~1 500 kW的涡轴发动机主要为10台电动机提供动力,且电动机均布置在两侧机翼前缘。通过贯穿整个机翼的螺旋桨滑流作用,提高全机低空低速较大迎角下的高升力和稳定性。
3 数值模拟
3.1 模拟方法
计算基于中国空气动力研究与发展中心自主研发的“亚跨超CFD软件平台”(TRIP3.0),采用雷诺平均N-S方程,应用LU-SGS方法作为离散方程组求解,空间方向黏性项采用二阶中心格式离散,无黏项运用MUSCL-Roe格式,湍流模型为SA模型,运用低速预处理技术、大规模并行计算和多重网格技术加速收敛,分布式螺旋桨采用等效盘进行简化。
3.2 计算网格
网格采用全对接结构网格生成,半模网格量为2 000万,网格块数260,其中第一层网格距离约1×10-5m。网格在螺旋桨后方适当加密,机翼弦向和展向网格点数为70×120。尾部布置的双发涡轴发动机在数值模拟中暂未考虑,螺旋桨采用无厚度圆盘代替。全机共分为机翼、机身、尾翼3个部件,各个螺旋桨则单独积分力,具体网格示意图如图5和图6所示。
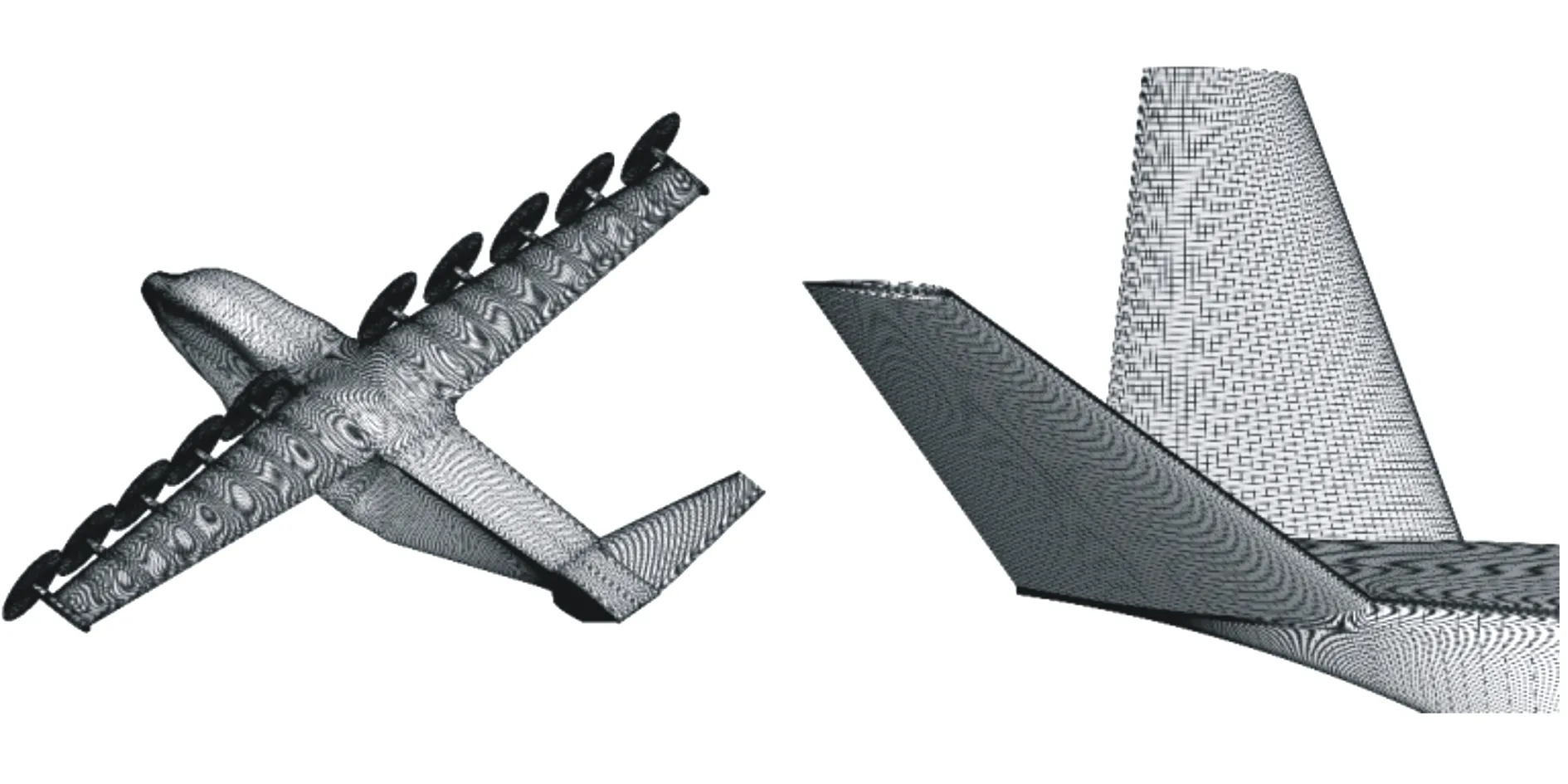
图5 全机表面网格 图6 尾部网格示意图
3.3 计算状态
初步分析以低空低速不开襟翼状态作为研究对象,来流速度200 km/h,迎角范围为-2~14°,分别考虑有无滑流情况。有滑流状态下,螺旋桨转速均为1 550 r/min,桨叶桨距为28.0°(取桨叶半径70%处)。
4 结果分析
为了更好地分析该分布式螺旋桨推进运输机方案及其滑流效应,主要从分布式螺旋桨推进运输机方案全机气动特性、压力分布、典型流场以及分布式螺旋桨下机翼流动4个方面开展分析。
4.1 全机气动特性
图7给出了有无滑流下全机阻力、升力、俯仰力矩和升阻比气动特性曲线,其中有滑流状态下阻力及升力均较无滑流大,如迎角α=3°,阻力增加约27%,升力增加约20%。迎角α=14°,阻力增加约39%,升力增加约28%;在升力曲线上,有滑流状态较无滑流的升力线斜率更接近线性,且不开襟翼最大升力系数大于2.0;在迎角α<10°时,有滑流和无滑流状态俯仰力矩系数相差较小,而迎角α>10°时,有滑流状态俯仰力矩线性度较无滑流状态更好。这主要是因为分布在机翼前缘的螺旋桨对来流做功,加快机翼附近气流速度,使得机翼动压增加,阻力增大,升力变大。

图7 有无滑流下全机气动特性曲线
为分析滑流对气动特性增量的影响规律,图8给出了有无滑流下全机阻力和升力系数差量曲线。有滑流较无滑流状态下的阻力和升力系数大;迎角越大阻力和升力差量越大,且迎角越大差量越明显;在迎角α=4°以内,升力差量增加明显,而阻力差量增加不显著,这可能是因为螺旋桨在一定程度上改变机翼前方气流的来流方向,使处于滑流区的部分机翼有效迎角存在一定滞后。同时螺旋桨滑流为机翼边界层注入能量,减小机翼流动分离引起的阻力增加。
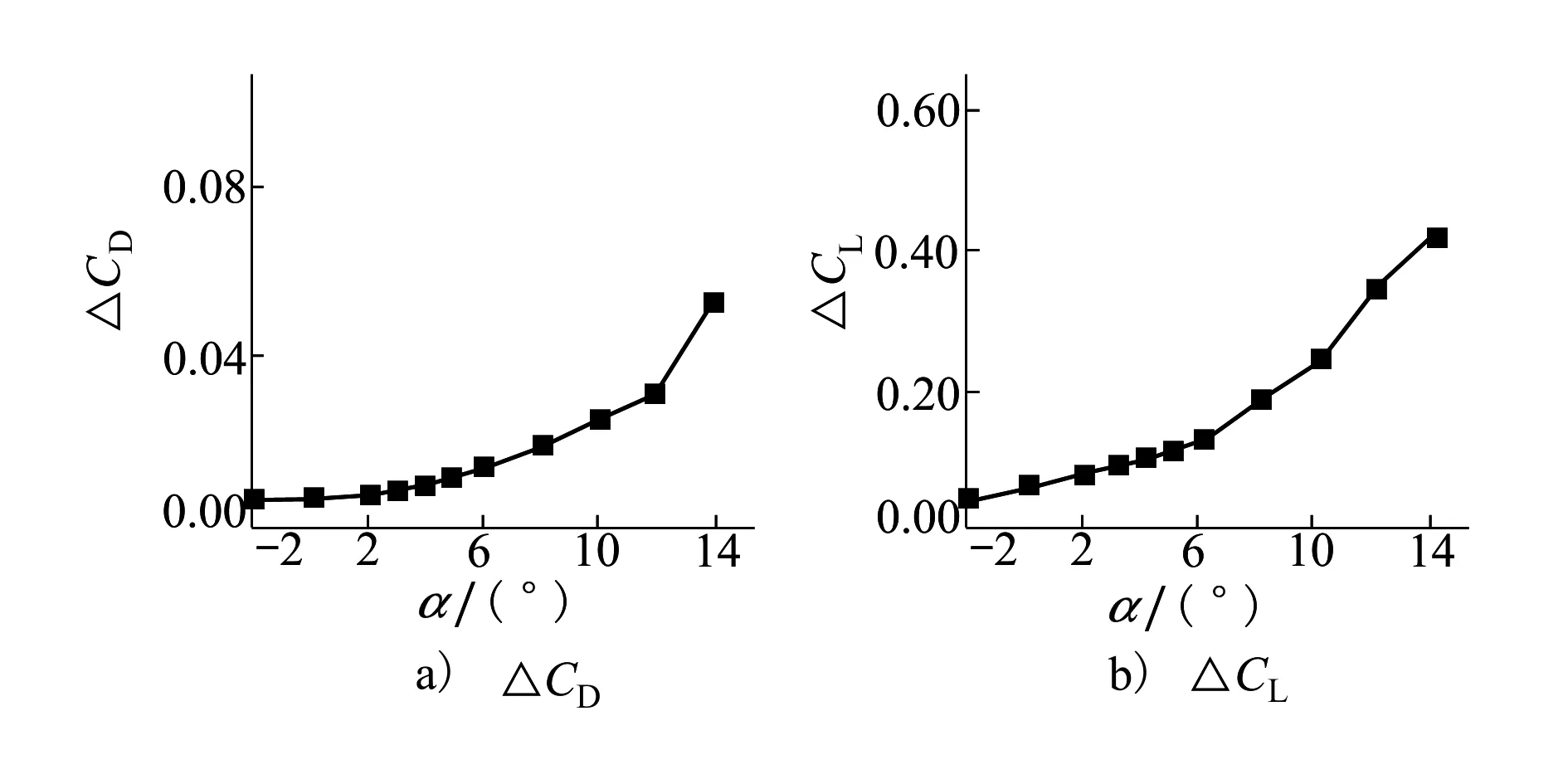
图8 有无滑流下全机阻力和升力系数差量
图9给出了有无滑流下全机俯仰力矩系数差量曲线。在小迎角范围内,有无滑流对全机俯仰力矩影响较小;在迎角α=4~8°区间,有滑流较无滑流状态,产生较小抬头力矩;在迎角α>10°时,有滑流较无滑流状态出现明显的低头力矩。
关于迎角α=4~8°区间,有滑流较无滑流状态,产生较小抬头力矩现象,图10和图11分别给出有无滑流下各部件俯仰力矩系数和差量分布,滑流对机翼和尾翼俯仰力矩影响明显,对机身影响较小;有滑流较无滑流状态机翼低头力矩大(机翼压心后移引起),尾翼抬头力矩较大;有滑流状态机翼俯仰力矩呈线性分布,而尾翼在迎角α=4°之后线性度较差。
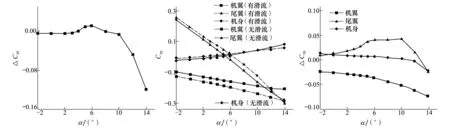
图9 有无滑流下全机俯 图10 有无滑流下各部件图11 有无滑流下各部件 仰力矩系数差量 俯仰力矩系数 俯仰力矩系数差量
4.2 机翼压力分布
图12给出了迎角α=4°时有无滑流下全机上下表面压力云图。在机翼上表面压力分布上,有滑流较无滑流状态低压区明显,且低压区域更大;有滑流下机翼表面低压区主要分布在螺旋桨后方;在单个螺旋桨后方机翼区域,靠内一侧低压区较外侧更大。在机翼下表面压力分布上,有滑流较无滑流状态高压区明显,且高压区域更大;有滑流下机翼表面高压区主要分布在螺旋桨后方;在单个螺旋桨后方机翼前缘,靠内一侧(或靠翼根一侧)高压区较外侧(或靠翼尖一侧)更大。这主要是螺旋桨对来流有一个加速和加旋作用,使得机翼前方来流动压增加。同时顺气流方向看,左侧机翼前缘螺旋桨顺时针旋转,使得流经螺旋桨气流靠内一侧上洗,靠外一侧下洗。
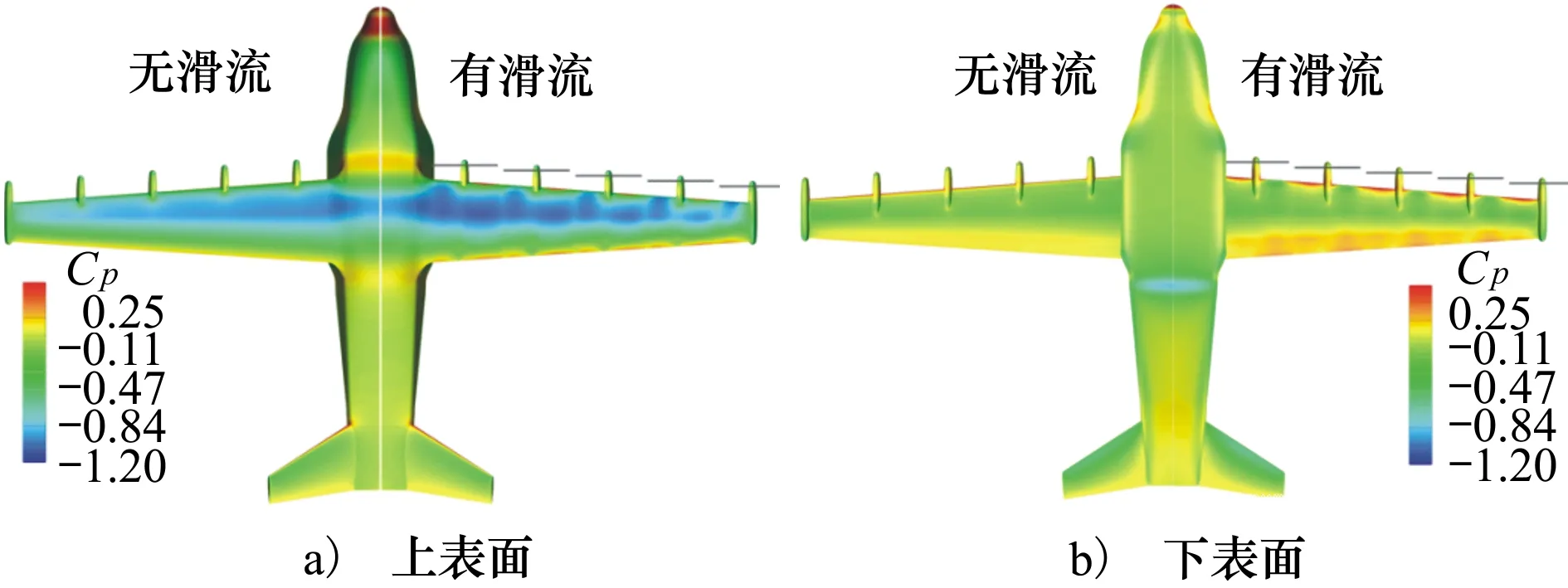
图12 有无滑流下全机上下表面压力云图
为进一步分析单个螺旋桨滑流对后方机翼影响情况,选取2号螺旋桨作为分析对象,对比距螺旋桨转轴0.7R处的机翼站位压力系数分布,如图13所示。
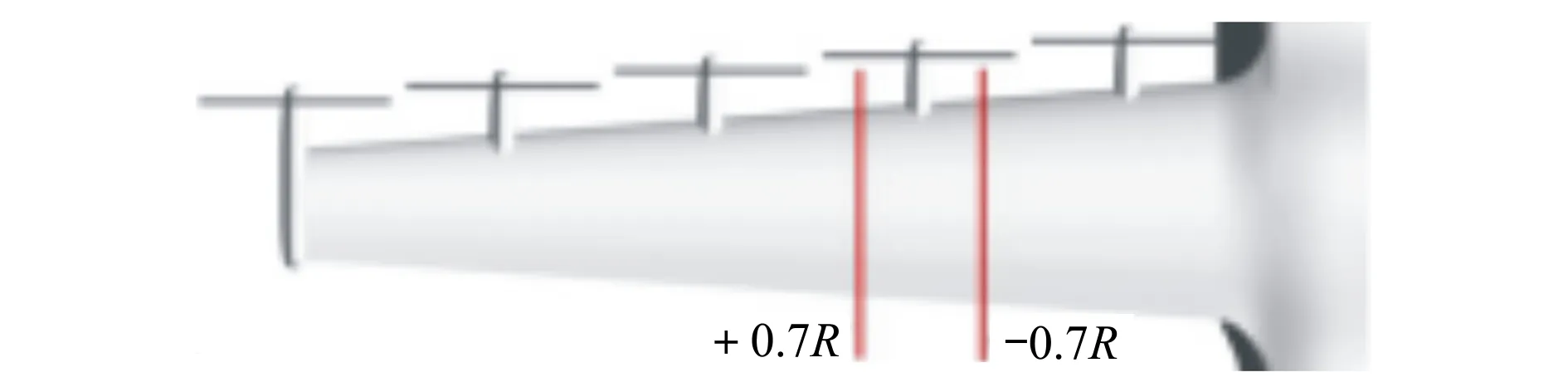
图13 机翼站位±0.7R示意图
同时,图14给出了该站位下有无滑流机翼剖面压力系数分布,在站位-0.7R处有滑流前缘吸力较无滑流状态大,且吸力峰较无滑流状态大,前缘下表面压力峰较无滑流大;在站位+0.7R处有滑流前缘吸力较无滑流状态小,而吸力峰较无滑流大,顺压梯度更强。
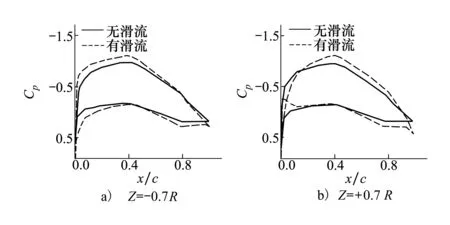
图14 有无滑流机翼站位±0.7R处压力系数分布
4.3 全机典型流场
重点对有无滑流机翼压力和马赫数云图以及全机俯仰力矩系数差量在迎角α=2~8°区间的“跳跃”现象进行分析。
图15为迎角α=4°时有滑流机翼站位±0.7R处压力云图及流线示意图,气流经过螺旋桨后压力均明显增大,且站位-0.7R低压区较站位+0.7R更大;从流线示意图来看,站位-0.7R的机翼来流经过螺旋桨后向上偏转,而站位+0.7R正好相反,来流经螺旋桨后向下偏转,即螺旋桨向上旋转一侧(站位-0.7R)的机翼真实来流迎角加大,而螺旋桨向下旋转一侧(站位+0.7R)的机翼真实来流迎角减小。
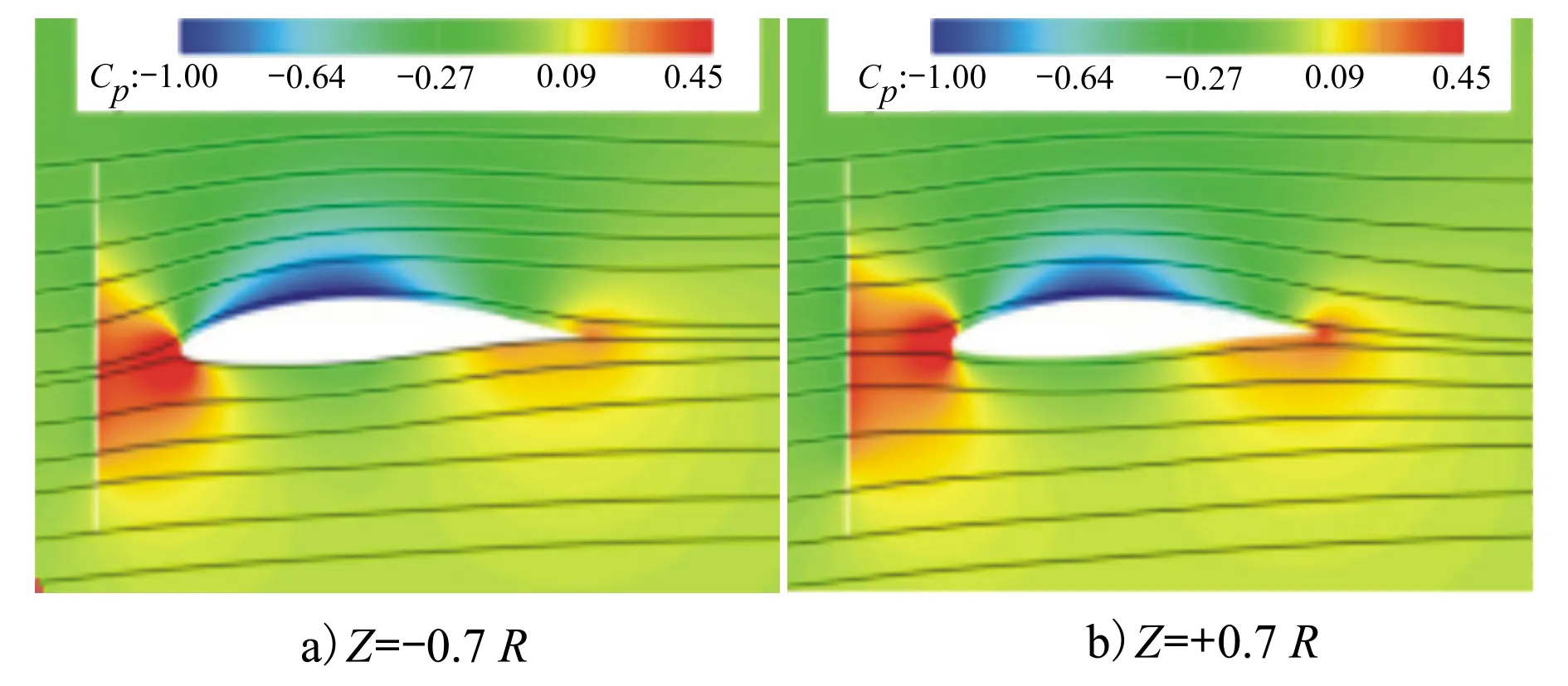
图15 有滑流机翼站位±0.7R处压力云图及流线示意图
图16给出了第1号螺旋桨转轴站位处有无滑流马赫数云图及流线示意图,有滑流状态下螺旋桨后方速度较无滑流更大,且高速区随迎角变化,偏转较小;流过上侧桨尖的流线,在迎角α=2°时在尾翼下方较远处,在迎角α=6°时在尾翼下方较近处,在迎角α=12°时则在尾翼上方;无滑流状态,流经尾翼的来流均为自由来流,仅在迎角α=12°时尾翼部分受机翼尾流干扰。这与图11中有无滑流下全机各部件俯仰力矩系数差量结果一致,即尾翼在迎角α=2°和α=12°时,有无滑流尾翼俯仰力矩差量较小,此时尾翼离滑流区较远或完全处于滑流区。而在迎角α=6°时,有无滑流尾翼俯仰力矩差量较大,这是由于尾翼部分处于滑流区引起。

图16 第1号螺旋桨转轴站位处有无滑流马赫数云图及流线示意图
4.4 分布式螺旋桨下机翼流动
位于机翼前缘的分布式螺旋桨,在旋转过程中对机翼表面流场影响显著。如图17给出了迎角α=4°时有无分布式螺旋桨滑流下,机翼1/4弦长马赫数差量云图。有滑流较无滑流状态在螺旋桨后方区域的马赫数差量明显,在其他区域差异很小;在机翼上表面马赫数增量区域向外侧平移,而下表面则向内侧偏移;有无滑流马赫数差量在桨叶下行一侧更为显著,如2号螺旋桨站位+0.7R处,这与图15的压力分布结果一致。这主要是桨盘前方来流迎角发生变化,引起桨盘载荷分布不均匀。

图17 有无滑流机翼1/4弦长马赫数差量云图
图18给出了迎角α=4°时有无滑流机翼1/4弦长处沿展向压力分布(顺气流方向看从翼根到翼尖,且桨叶均顺时针旋转),有滑流上表面吸力较无滑流在整个展向位置均偏大,而下表面压力在大部分区域偏大;有滑流上表面存在5个明显的吸力峰,下表面相对无滑流状态存在5个明显的高压区,且均位于螺旋桨轴线左侧;有滑流下表面存在4个明显的低压峰,且均较无滑流状态的压力偏小。

图18 有无滑流机翼1/4弦长处沿展向压力分布
为分析分布式螺旋桨滑流对机翼影响范围,图19给出了迎角α=4°时有无滑流下全机表面压力云图及涡量等值面,可以看出前缘布置分布式螺旋桨的机翼大部分区域处于滑流区。

图19 有无滑流下全机表面压力云图及涡量等值面
通过分析该方案的分布式螺旋桨滑流对机翼流动影响情况,发现分布式螺旋桨直径相对机翼厚度较大时,其滑流对机翼表面动压增加效果较弱。如图17所示马赫数差量在离机翼表面较远处(在桨叶半径0.75R附近)增加明显,而机翼表面附近的马赫数增量明显区域相对较少,即更多的螺旋桨功率用于对远离机翼区域的气流做功,这是图7中有滑流下升力系数增加相对文献[7]不显著的主要原因之一。
5 结 论
a) 有滑流状态较无滑流阻力大,升力大,且有滑流状态较无滑流的升力线斜率更接近线性;
b) 有滑流较无滑流状态机翼低头力矩大(机翼压心后移引起),尾翼抬头力矩较大(尾翼下表面靠近滑流区);
c) 螺旋桨向上旋转一侧的机翼真实来流迎角加大,而螺旋桨向下旋转一侧的机翼真实来流迎角减小;
d) 尾翼离滑流区较远或完全处于滑流区时,有无滑流尾翼俯仰力矩差量较小,而尾翼仅部分处于滑流区时,差量较大;
e) 分布式螺旋桨直径相对机翼厚度较大时,更多的螺旋桨功率用于对远离机翼表面区域的气流做功,引起机翼升力系数增加不显著。
由于该方案螺旋桨数量有限且直径相对机翼厚度较大,未能充分体现分布式螺旋桨滑流增升优势。同时旋转方向在同侧机翼上转向相同,而关于螺旋桨的转向组合方案与机翼上下表面的吸力峰和高压区数量存在一定关系,进而对全机气动特性产生影响,特别是翼尖螺旋桨旋转方向。这些均有待后续进一步研究,并为分布式螺旋桨推进工程应用提供数据参考。
致谢在此对课题组张玉伦、洪俊武、王光学、张书俊、孟德虹、孙岩表示感谢。
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
湖北工业职业技术学院学报(2021年1期)2021-04-01
装备制造技术(2020年1期)2020-12-25
名车志(2020年10期)2020-10-27
民用飞机设计与研究(2020年1期)2020-05-21
空间科学学报(2020年4期)2020-04-22
产品可靠性报告(2017年6期)2017-09-05
北京航空航天大学学报(2016年3期)2016-02-27
科技传播(2014年4期)2014-12-02
少年科学(2014年7期)2014-08-18