空间四足爬行机器人设计及步态规划*
2019-05-07 12:28蒋儒浩王玉琳徐清遥
组合机床与自动化加工技术 2019年4期
蒋儒浩,王玉琳,刘 冀,徐清遥
(合肥工业大学 机械工程学院,合肥 230009)
0 引言
近年来,爬行机器人已经在高空作业、消防救援、高危巡检等领域得到了较多应用[1-2]。全空间爬行机器人不仅可以在地面上完成各种运动动作,还能在不借助外力的情况下,在玻璃、砖墙等垂直物体的表面甚至在天花板上爬行并执行规定动作,还可通过其搭载的传感器,将采集到的各种信息实时传递给操控者。爬行机器人可以代替人从事一些高危或重复的工作,比如高危巡检、军用侦察、探测维修等,从而有效保障人身安全、提高工作效率[3-4]。
腿足式爬行机器人相对于履带式和轮式机器人具有更强的攀爬和越障能力[5-6]。北京航空航天大学研制了一种负压爬墙机器人(City-Climber),这种机器人需要行走在光滑平坦的单一平面,爬行转向虽灵活,但是攀爬能力有限,只能越过1cm高的障碍[7-8]。哈尔滨工业大学研制出一种轮式气动单吸盘壁面爬行机器人,只适应各种常规单一平面,且体形较大,越障能力受限[9-10]。四川大学研制出一种电力塔攀爬机器人,基于两指夹持机构和伸缩机构实现攀爬,越障能力虽较强,但其为专用机器人,只能在电力塔上攀爬[11]。中国科学技术大学和以色列理工学院等提出一种仿生吸附式机器人,依据仿生原理制作的机器人可以在多种表面爬行,且载荷分布也较合理,但其爬行速度缓慢,越障能力一般,转向不够灵活,且成本高,无法大量普及[12-13]。
综上所述可以看出,目前国内外现有的腿足式爬行机器人相对于轮式机器人虽然拥有较强的攀爬能力,但是全空间内攀爬和越障能力仍然不足,且存在爬行转向不够灵活的问题[14-17]。为此,本文设计了一种空间四足爬行机器人,采用真空吸附方式,通过特殊布置的4只爬行足,可以实现360°空间连续攀爬,拥有较强的攀爬越障能力,同时爬行转向灵活。
1 空间四足爬行机器人的结构
图1为空间四足爬行机器人的总体结构图,机器人主要由主体(中心球壳)、4只爬行足和控制系统三部分组成。在正四面体体心(球壳中心)到4个顶角的连线上对称布置4只爬行足,爬行足安装于机器人的主体(中心球壳),每只爬行足包括大腿、伸长腿和小腿三部分。

图1 空间四足爬行机器人总体结构图
爬行足的结构如图2所示,主要由舵机、连接架、笔式推杆、无约束转动副以及吸盘等组成,4只爬行足相互独立,其中每只爬行足拥有5个自由度。其大腿包含2个相互正交的转动副,分别为第一转动副和第二转动副;伸长腿包含1个移动副;小腿包含2个转动副,分别为第三转动副和无约束转动副。除去执行末端(真空吸盘)等装置,空间四足爬行机器人一共有20个自由度。图3为机器人的自由度简图,图中将4只爬行足分别记作a、b、c、d,其中a1、a2、a3、a4、a5为a爬行足的5个自由度,a1、a2为相互正交的第一转动副和第二转动副,a3为移动副,a4、a5分别为第三转动副和无约束转动副;爬行足b、c、d依此类推。
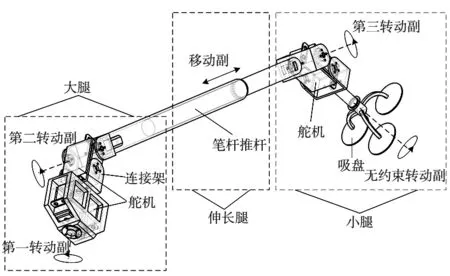
图2 机器人爬行足结构图和自由度分布
机器人的每只爬行足均有支撑吸附与悬空两种状态。当爬行足处于悬空状态时,其为一串联开链机构,为保证爬行足悬空时具有确定的状态,5个自由度都需要控制。当爬行足处于支撑吸附状态时,其为一闭链机构。机器人爬行移动时,始终有3只爬行足末端稳定吸附于爬行表面(包括墙面、地面等表面)。在图1中,假设a、b、c爬行足为支撑状态,则此时的运动链如图4所示。爬行足的大腿处两个转动副正交,相当于一个万向铰链(U副),该模型相当于一个少自由度3-UPRR并联机构[18],并联机构中引入螺旋理论可以使运动问题的求解变得便捷,可以把每一只爬行足作为一个独立的分支螺旋系,在所建立的分支坐标系Oi-XiYiZi中,任一爬行足的运动螺旋为:
(1)
式中,i=1~3,对应a、b、c三只爬行足的编号;Sij=(p,q,r;P,Q,R)为3只爬行足第j个运动副螺旋标量表达形式(j= 1~5),其中p、q、r表示螺旋的方向数;P、Q、R表示在三维空间中,螺旋的线距在三个坐标轴上的分量。如运动螺旋S13表示a爬行足第3个运动副——移动副的空间运动情况。式(1)中αi是第i只爬行足上U副十字平面的法线与爬行表面的夹角。

图4 机器人稳定吸附爬行表面时运动链自由度示意图
由式(1)可以得出一个约束螺旋系:

(2)
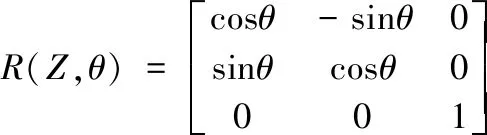
图4中,当3只爬行足吸附爬行表面时,垂直于爬行表面看去,3个吸附点构成一个等边三角形,且球壳中心正好落在三角形的中心点。以a爬行足到球壳中心连线为基准,规定θ1=0,则b、c爬行足到球壳中心连线与基准线的夹角分别为θ2=120°和θ3=-120°(假定逆时针角度为正)。将三个不同的θ角代入式(2)中,求得3个方向的余弦矩阵,据此可导出3只爬行足相对于Oi-XiYiZi坐标原点在固定坐标系O-XYZ中的位置矩阵,再通过坐标转换公式,即可将每只爬行足上的反螺旋转换到固定坐标系下:
(3)
从式(3)可以看出,3只爬行足的3个约束螺旋两两之间没有线性关系。由此可知,在3只爬行足末端稳定吸附于爬行表面的过程中,球壳只做空间平移,不做空间转动,这给机器人的运动控制带来了方便。
由文献[19]可知,稳定吸附的3只爬行足构成的并联机构的自由度可按改进的Grübler-Kutzbach公式进行计算:
(4)
d=6-λ
(5)
针对本文所述的机器人,式(4)和式(5)中各参数的物理意义和数值如表1所示。
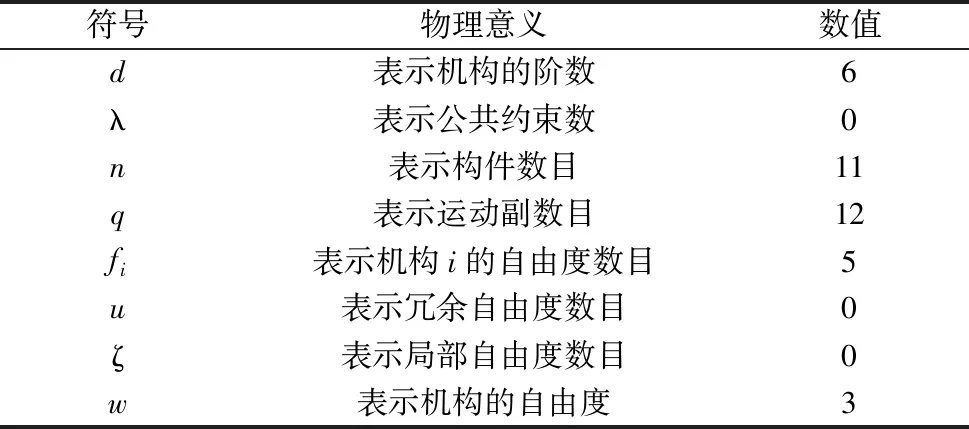
表1 各参数含义及其取值
将表1中的数值代入式(4),求得自由度:w=6×(11-12-1)+(5×3)+0-0=3。
上述计算结果表明,在机器人爬行足稳定吸附的过程中,这种3-UPRR并联机构的控制只需要3个输入驱动。为了简单起见,本文只考虑3个移动副的输入,而无需另行控制其他转动副,从而降低控制难度,发挥并联机构的优越性,提高控制精度[20],保证爬行足行走位移的准确性。
2 空间四足爬行机器人的工作原理
如图1、图5和图6所示,四足机器人在爬行过程中,始终有3只爬行足呈正三角形稳定吸附于爬行表面。如图5所示,当机器人稳定吸附时,3只爬行足a、b、c在爬行表面的附着点分别用A、B、C来表示,d爬行足暂时悬空。爬行过程如图7所示,机器人每爬行一步需要经历3个状态:稳定吸附状态、爬行过渡状态、新的稳定吸附状态。图5中,悬空的d爬行足可能的运动轨迹有3种,分别为沿着AB、BC、CA中垂线3个方向运动,如图6所示,3种轨迹的落点分别对应爬行表面上的D1、D2、D3这3个点。
针对3种轨迹,下面分析一种情况,假定d爬行足的最终落点为图6中AB中垂线上的D1点:起初,d爬行足如图5悬空,此时a、b、c这3只爬行足均为稳定吸附状态;当中心球壳平动到AB连线正上方时,c爬行足解除吸附,a、b仍为稳定吸附状态,球壳开始翻转;c爬行足第2转动副和第3转动副协同运动,直至中心球壳转过109°28′后,d爬行足开始接触爬行表面并吸附到D1点,于是a、b、d爬行足稳定吸附于爬行表面,建立一个新的吸附状态。此时c爬行足悬空,为机器人行走下一步做好准备。按照上述方式,机器人可以遍历爬行的任意位置。

图5 爬行足的稳定初态图
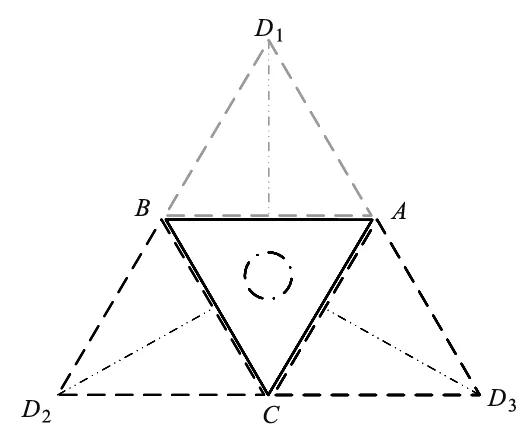
图6 爬行足d的三个可能落点D1、D2、D3

(a) 稳定吸附状态 (b) 爬行过渡状态 (c) 新的稳定吸附状态 图7 机器人的3个爬行状态
3 空间四足爬行机器人的步态规划
为了实现空间四足机器人在爬行表面上稳步爬行,需要对机器人的步态进行规划。下面分析机器人移动一步的过程中,每只爬行足的4个转动副和一个移动副的变化情况,从而为控制系统对机器人的爬行控制奠定基础。
3.1 机器人移动副位移变化情况
图8为机器人爬行一步前后,爬行足的线位移变化情况。图8a中,爬行一步前,O点为球壳中心,A、B、C为吸附点;爬行一步后,O1点为球壳中心,A、B、D1为吸附点。

(a) 爬行一步的前后 (b) 爬行中间过程 图8 爬行足的线位移变化情况
图8中,当爬行足稳定吸附时,4只爬行足的初态长度OA=OB=OC=OD=L。开始爬行时,设球壳中心由O点向O1点运动速度为v,所用时间为t。图8b中,K为爬行过渡状态的球壳中心翻转极限位置,三角形KAB所在平面垂直于三角形ABC所在平面,此时OA、OB缩成KA、KB,为最短。球壳中心从O到K期间为平动,跨越K点后,OA、OB逐渐伸长,球壳中心先翻转再平动,当d爬行足吸附到D1点时,球壳中心运动至O1点,K为OO1的中点。
设P为从O到O1线段上的任一点,假定球壳中心从O点运动到O1点时,OA、OB、OC、OD的线位移变化量分别为ΔL1、ΔL2、ΔL3、ΔL4,在图8b中由运动关系可知 ΔL1=ΔL2,并有以下几何关系成立:
(6)

(1)OA、OB的线位移变化量:
(2)OC的线位移变化量:
(3)OD的线位移变化量:
下面结合图8b对机器人爬行一步期间OC的线位移变化量公式进行详细分析:


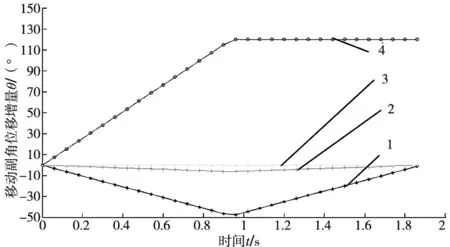
(4)t1 OD的变化量为OC变化量的逆过程,在此不再赘述。 图9表示机器人4只爬行足每移动一步的过程中,4个移动副线位移随时间的变化情况,根据此图即可规划机器人爬行足的移动副控制。 1. OC线位移变化情况 2. OD线位移变化情况 3. OA、OB线位移变化情况图9 4只爬行足移动副位移变化情况 由图1和图2可知,机器人有a、b、c、d共4只爬行足,每只爬行足具有4个转动副,其中第4转动副为无约束转动副。根据3.1节所设定的时间参数,图10示出了4只爬行足移动一步的过程中,每个转动副角位移随时间的变化情况,据此即可对机器人爬行足相应的转动副进行控制。 (a) a爬行足转动副角位移变化情况 (b) b爬行足转动副角位移变化情况 (c) c爬行足转动副角位移变化情况 (d) d爬行足转动副角位移变化情况1. 第1转动副 2. 第2转动副 3. 第3转动副 4. 第4转动副 图10 4只爬行足转动副角位移变化情况 所述的空间四足爬行机器人在爬行过程中始终有3只爬行足共9个真空吸盘稳定吸附于爬行表面,吸附过程中只需控制3只爬行足移动副的线位移即可限定机器人的运动轨迹,运动控制方便。机器人爬行足以杆件形式连接,任意两只爬行足呈109°28′ 排布,预留空间大,攀爬时角度跨越范围宽,既可以爬行在单一平面,也可以在相互垂直的两个平面之间进行跨越。机器人每爬行一步之后,下一步的落脚点具有3个方向可以选择,既有腿足式机器人较强的越障能力,同时又有轮式机器人转向灵活的特点。爬行轨迹可以遍历360°空间,为腿足式机器人爬行足的结构设计和爬行方式提供了新思路。


3.2 机器人转动副角位移变化情况



4 结束语
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
中国典型病例大全(2022年9期)2022-04-19
石油化工设备(2021年6期)2021-11-20
机电信息(2021年17期)2021-07-01
中华养生保健(2020年5期)2020-11-16
内燃机与配件(2020年22期)2020-09-10
科学技术创新(2020年27期)2020-09-05
物理与工程(2019年5期)2019-10-23
课程教育研究·学法教法研究(2018年14期)2018-08-11
光学仪器(2016年5期)2017-01-12