融合AI算法的汽车座椅及后视镜人机工程系统
2019-05-05 02:12邹梁楠岳峰丽许傲徐世寒郑夏卿张思繁
智能建筑与智慧城市 2019年3期
邹梁楠,岳峰丽,许傲,徐世寒,郑夏卿,张思繁
(沈阳理工大学 汽车与交通学院)
1 引言
随着汽车工业技术的不断发展,高档、舒适的汽车座椅已成为衡量汽车智能性与质量好坏的标准之一,随着人们物质生活不断的改善,对汽车舒适度的要求也逐渐增高,提高汽车座椅调整水平的要求也日渐紧迫。
目前,汽车座椅参数的控制多采取机械调整方法和电动调整2种。可是大部分汽车座椅没有搭载存储功能,同一驾驶者在不同的时段使用汽车时,汽车座椅的参数可能被别人更改,而重新调节座椅的参数又十分烦琐。
2 设计特点
汽车座椅存在的主要问题是需要手动调控,对不同驾驶员的驾驶会造成一定的不便,而本设计针对这个问题,开发出了自动识别调整装置,为驾驶员的出行提供了更加舒适、方便的体验。本项设计的主要创新有以下3点:
1)本次设计首次将AI算法运用在汽车座椅设计上,每一位新的司机上车后都会进行AI扫描,计算出人体H点(指二维或三维人体模型样板中人体躯干与大腿的连接点,即胯点),通过人机工程学计算座椅纵向位置、靠背倾角、座椅高度、方向盘角度和方向盘伸出量,充分考虑到人体的舒适度与方便性。
2)对H点的测量,采取了一种新型的物体探测器件——人体位置信息探测器,通过发射超声波来测量安置在被测物体周边的9个电极空间上分布电容的微小变化,以此获得被测物体的位置、大小和相对位移变化等信息[1]。可以应用于非接触探测液面高度,以及在汽车安全系统中探测座位上人的位置、体积等信息,将其首次应用于智能汽车座椅调节系统,是本设计的创新点之一。
3)除了座椅的自动调节,本次设计通过测算眼椭圆来计算可获得最大视野的后视镜角度,也是本设计的创新点之一。
3 控制示意图
座椅调节需要人体位置信息探测器扫描计算人体H点,把信息传到ECU(电子控制单元),通过AI算法,ECU输出控制信号到步进电机和驱动电机,调整座椅至最佳位置[2]。
融合AI的电动座椅采用了微机控制[3],通过雷达自动调整座椅参数,并将选定的座椅调节位置进行记忆,如图1所示。
系统采用雷达进行人体扫描,把信号传到微机,微机计算后通过电动机驱动操纵装置来调整座椅到人体最适合的位置。
该系统运用记忆设备经由4个电位计来控制座椅的调整位置,座椅调整完成后,电子控制装置把电压信号储存,当作重新调整位置时的基准,日后按存储的状态来调节座椅位置,节省下次调节时所需的运算过程。
4 研究内容
1)确定驾驶最佳位置
设计采用人体位置信息探测器扫描计算出人体H点,根据人机工程学计算出:①座椅纵向位置;②靠背倾角;③座椅高度;④方向盘角度;⑤方向盘伸出量。正常坐姿状态下,支撑身体的重要组成结构是后背、臀以及腿等部分。座椅的形状应与脊椎自然弯曲相适应,根据人体结构得到靠椅的参数:靠背角度取为105°~115°,高靠背座椅的高度应达到肩部,可取为535~555mm,宽度为485mm,坐垫倾斜角约为7°[4],如图2所示。

图2 驾驶最佳位置
2)调节座椅位置
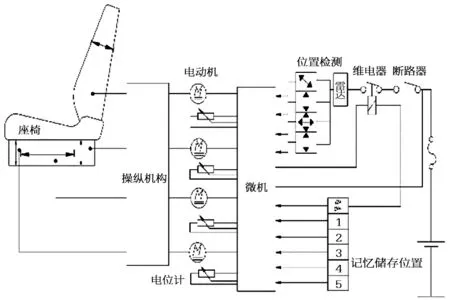
图1 智能座椅控制示意图
座椅控制系统主要部分包含步进电机、传感器和ECU控制系统,以中央处理器为中心连接各个部件,控制座椅位置的调节并得到反馈。而在确定最佳位置后,将会锁死调节系统,防止驾驶员在驾驶过程中误触调整按钮,造成行车隐患。
每一位新的司机上车后,都会进行AI扫描。其中,人体位置信息探测器进行3D扫描,将数据上传至ECU,由AI芯片结合AI算法快速计算出胯点区间,录入信息后输出信号,信号输出到步进电机控制器,由步进电机精确调整座椅至最佳位置。
3)探测器的选择和安放位置
人体位置信息探测器负责扫描人体H点,根据具体的车况研究选择探测器的安放位置,力求达到完美的人体数据搜集。
4)调整后视镜角度
通过AI算法根据已确定的H点水平行程及眼椭圆百分位值(见图3),计算出眼椭圆中心在自身坐标系中的位置,从而确定两视图上眼椭圆中心的位置,获得眼椭圆位置数据后,计算得到最大后视镜视野的折射角,从而调整后视镜角度[5]。
5 人工智能
1)部分算法公式
卷积神经网络中al(v,kl-1,k)和bl(k)分别表示兴奋性输入和抑制性输入的连接系数;rl(k)控制特征提取的选择性,它控制着位于每一S-层处的单个抑制子平面中每个神经元的输入。
kl是第l级中的S子平面的数量。Dl是C—元的感受野。dl(v)是固定兴奋连接权的权值。如果第kl个S神经元子平面从第kl-1子平面处收到信号,那么jl(kl,kl-1)的值为1,否则为0[6]。
2)部分源代码
import os
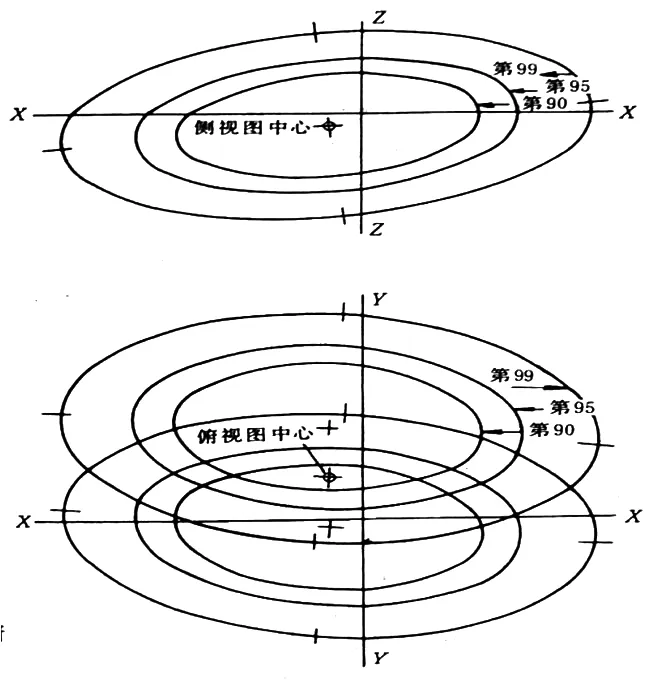
图3 眼椭圆中心
import sys
import time
import numpy
import theano
import theano.tensor as T
from theano.tensor.signal import downsample
from theano.tensor.nnet import conv
from logistic_sgd import LogisticRegression, load_data
from mlp import HiddenLayer
def __init__(self, rng, input, filter_shape, image_shape, poolsize=(2, 2)):
assert image_shape[ 1 ] ==filter_shape[ 1 ]
self.input = input
# there are "num input feature maps * filter height * filter width"
# inputs to each hidden unit
fan_in = numpy.prod(filter_shape[1:])
# each unit in the lower layer receives a gradient from:
# "num output feature maps *filter height * filter width" /
# pooling size
fan_out = (filter_shape[ 0 ] *numpy.prod(filter_shape[2:]) /
numpy.prod(poolsize))
# initialize weights with random weights
W_bound = numpy.sqrt(6. / (fan_in + fan_out))
self.W = theano.shared(
numpy.asarray(
rng.uniform(low=-W_bound, high=W_bound, size=filter_shape),
dtype=theano.config.floatX
),
borrow=True
)
6 结语
本设计是融合AI算法的汽车座椅及后视镜人机工程调节系统,利用AI算法计算并调整座椅最佳位置,通过测算眼椭圆计算可获得最大视野的后视镜角度并进行调节。比较现有的汽车座椅手动调整和电动控制2种方式,本设计不仅可以智能调节汽车座椅,而且可以对每一位司机进行AI扫描进行智能调节,弥补了目前汽车电动座椅只能存储2~3组驾驶人体征信息的不足。
猜你喜欢
数学杂志(2022年5期)2022-12-02
汽车实用技术(2022年7期)2022-04-20
中学生数理化(高中版.高二数学)(2021年12期)2021-04-26
北京汽车(2020年3期)2020-07-15
新教育论坛(2019年14期)2019-09-10
汽车文摘(2017年4期)2017-12-07
中国新闻周刊(2017年21期)2017-06-15
福建中学数学(2016年4期)2016-10-19
科学启蒙(2016年7期)2016-08-06
汽车零部件(2015年8期)2015-06-23