
基于波束指向对准的空空导弹短报文数据链技术研究
2019-04-26 09:18:18赵洪峰刘伟鹏
空天防御 2019年2期
秦 峰,赵洪峰,刘伟鹏
(上海机电工程研究所,上海 201109)
0 引 言
传统的空空导弹中制导阶段制导信息的获取主要依靠载机雷达,载机雷达探测到目标后通过双向数据链将制导信息传递给导弹[1-2]。对于中远程空空导弹,由于导引头开机距离远小于发射距离,为满足中末制导交班精度要求,导弹发射后载机需继续跟飞至中末制导交班,以保证双向数据链通信。但是载机长时间跟飞,使其易受敌方攻击,这就给载机的安全带来了极大的风险。此外,目前空空导弹数据链仍采用载机与导弹点对点的通信模式,难以满足第5代空空导弹网络化制导的需求[3-4]。
北斗卫星导航系统空间星座由GEO(地球同步轨道)、IGSO(倾斜地球同步轨道)和MEO(中地球轨道)3种卫星组成,其中,5颗GEO卫星具备定位和短报文通信功能[5]。将短报文通信功能应用于空空导弹数据链,建立空空导弹与地面指挥中心的实时通信短报文数据链,依靠地面指挥中心为导弹提供制导信息,可以保证载机迅速脱离战场,降低其被击落的风险,进而可减少战争中的飞机损耗。利用短报文数据链构建制导数据链网络,可实现地面指挥中心与多个空空导弹短报文数据链的同时建立,还可以实现中远程导弹的超视距攻击能力和弹群协同作战能力,加大对敌方的连续打击力度。
本文针对传统中远程空空导弹双向数据链通信距离的不足,提出了一种新的将短报文数据链应用于中远程空空导弹的作战模式;与此同时,为解决短报文通信时波束方向相对固定导致通信成功率低的问题,又进一步提出了一种波束指向对准技术。通过滚转角控制和波束赋形,根据导弹位置将短报文天线方向矢量实时与卫星通信波束指向对准。短报文数据链技术获得突破后可以在各个型号上通用,为新一代导弹作战模式提供新的选择。
1 短报文数据链作战应用模式
1.1 短报文数据链特征
短报文数据链与传统数据链都具有双向传输数据的功能,分为前向链路和返向链路,双向数据传输均需以经定位总站转发的双跳的形式实现。根据所插通信卡类型的不同,通信设备分为普通用户机和指挥型用户机,普通用户机插有普通卡,指挥型用户机插有指挥卡。普通卡和指挥卡均有一个类似手机号码的用户ID号,普通用户机还能以通播的形式绑定为指挥型用户机的下属用户。普通用户机仅能实现点对点形式的通信,指挥型用户机除此之外还可以实现通播形式的通信,即同时向所有下属用户(具有同一通播ID)通播信息。用户机所插通信卡均具有军码密钥,可以实现数据的加解密,保证数据传输的安全性。
1.2 短报文数据链方案设计
借鉴传统数据链的应用方式,结合短报文数据链的特征,对短报文数据链在中远程空空导弹上的应用进行了如下设计。
1) 地面指挥中心装备指挥型用户机,导弹和载机上装备普通用户机并绑定为该指挥型用户机的通播下属用户,实现地面指挥中心对导弹和载机的指挥控制。
2) 地面指挥中心传输信息至导弹和载机的链路为前向链路,用于传输制导导引信息;导弹和载机传输信息至地面指挥中心的链路为返向链路,用于传输导弹和载机的状态信息。
3) 采用通播群发的形式建立前向链路并解析出安装在地面指挥中心上的指挥型用户机的用户ID,然后,以点对点的形式建立返向链路传输导弹和载机的状态信息。
这些设计可以构建一个空空导弹短报文数据链网络,实现机群和弹群协同作战,实现多弹对单一目标、多弹对多目标的超视距攻击。
1.3 短报文数据链作战应用模式
根据上述设计,应用短报文数据链的空空导弹可以采取如图1~2所示的作战模式。
1) 导弹发射前,地面指挥中心通过自身雷达探测到目标,将目标信息作为制导导引信息,通过指挥型用户机经短报文卫星以通播群发的形式转发给载机,载机可以在自身火控雷达截获目标前对导弹进行目标装订,实现超视距攻击,降低载机被攻击的概率; 与此同时,载机将自身状态信息以点对点的形式回复给地面指挥中心,便于地面指挥中心指挥载机协同作战。
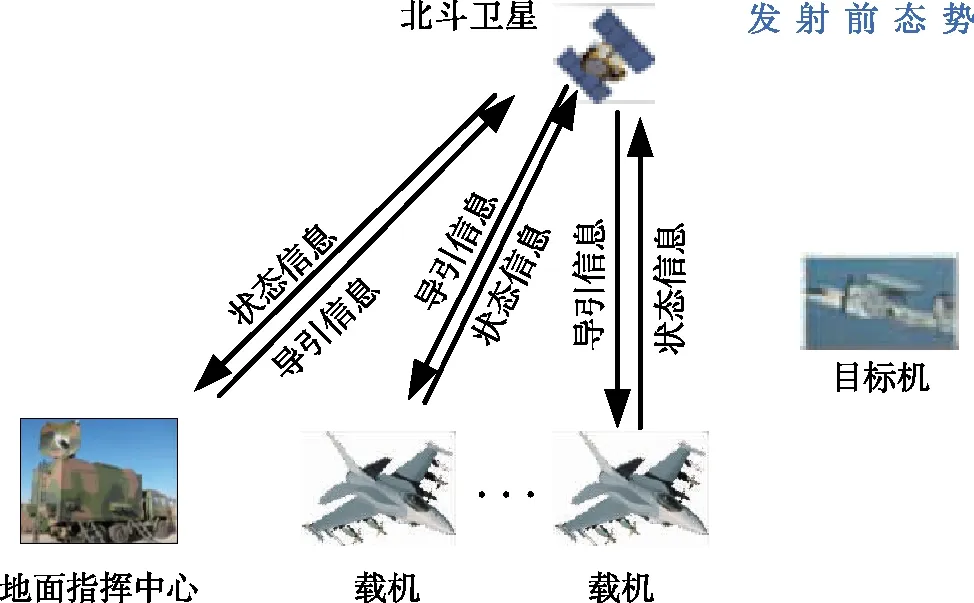
图1 发射前应用短报文数据链的空空导弹作战方式Fig.1 The operational mode of the air-to-air missile with the short message data link before the missile launch
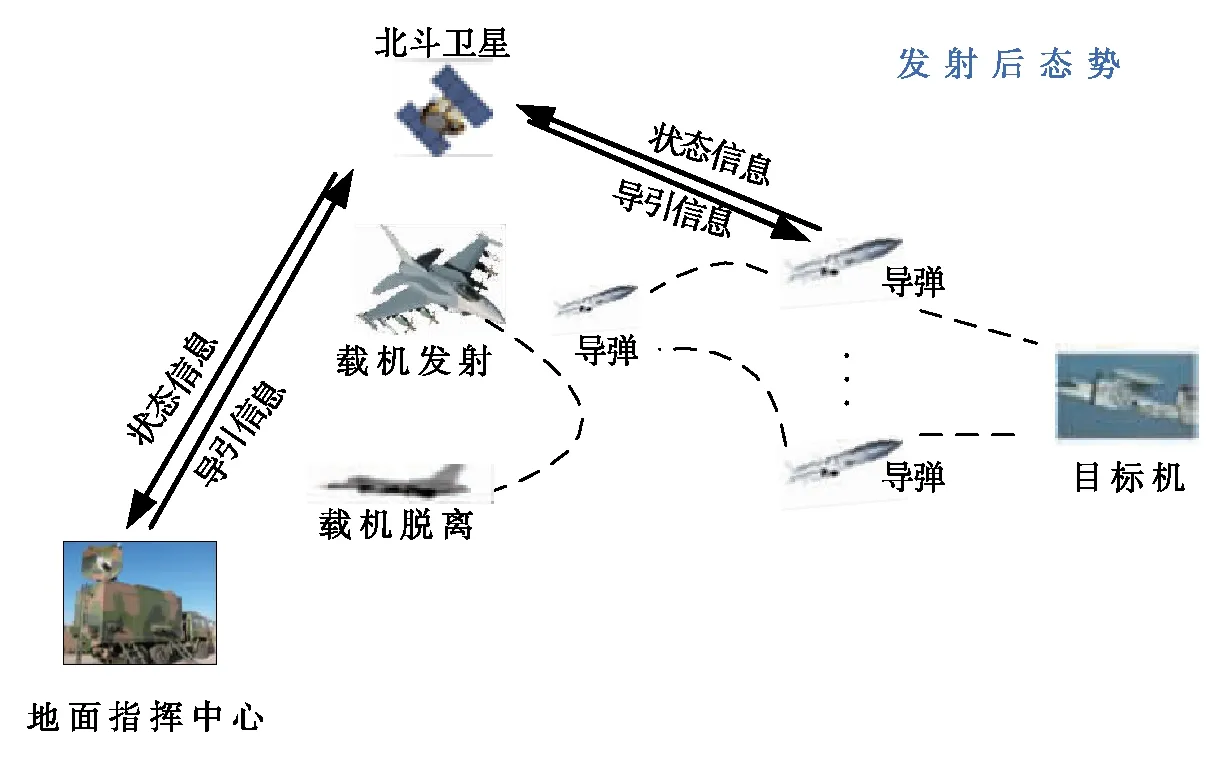
图2 发射后应用短报文数据链的空空导弹作战方式Fig.2 The operational mode of the air-to-air missile with the short message data link after the missile launch
2) 导弹发射后,地面指挥中心通过自身雷达探测到目标,直接将目标信息作为制导导引信息,通过指挥型用户机经短报文卫星以通播群发的形式转发给导弹,引导导弹对目标进行攻击;与此同时,导弹将自身状态信息再经短报文卫星以点对点的形式回复给地面指挥中心。这种模式下多枚导弹可以同时与地面指挥中心进行信息交互,在地面指挥中心的指挥下进行协同联合作战。
2 短报文波束指向对准
短报文信号仅由5颗GEO卫星发出,卫星至导弹的波束方向相对固定;同时,导弹上采用的短报文处理机接收和发射天线往往是与弹体共形的天线,并非全向天线,接收和发射角度有限。因此,如不采用波束指向对准控制,在部分弹道下卫星指向波束会在短报文处理机接收和发射角度范围之外,这样就会产生波束跟踪不稳定现象,从而导致数据丢包,通信成功率无法保证,影响制导精度。因此,本文提出一种新的滚转角控制波束指向对准方法,可在导弹飞行过程中实时对导弹滚转角进行控制,使弹载短报文处理机天线法向矢量始终实时指向短报文通信卫星,保证短报文通信稳定。
通过滚转角控制指向对准虽然可以解决短报文波束指向对准,但由于导弹飞行过程姿态变化往往较大,在爬升和下降时即便采用滚转角控制对准,控制后波束指向角仍可能大于天线接收和发射角度。所以,本文又进一步提出了将波束赋形与滚转角控制相结合的联合对准方法,用于短报文波束指向对准。若导弹滚转后波束指向角仍大于天线接收角度,则利用波束赋形使多阵元天线波束合成方向矢量与短报文波束来波方向矢量夹角小于接收角度,以实现短报文波束的指向对准。整个对准实现过程如图3所示。
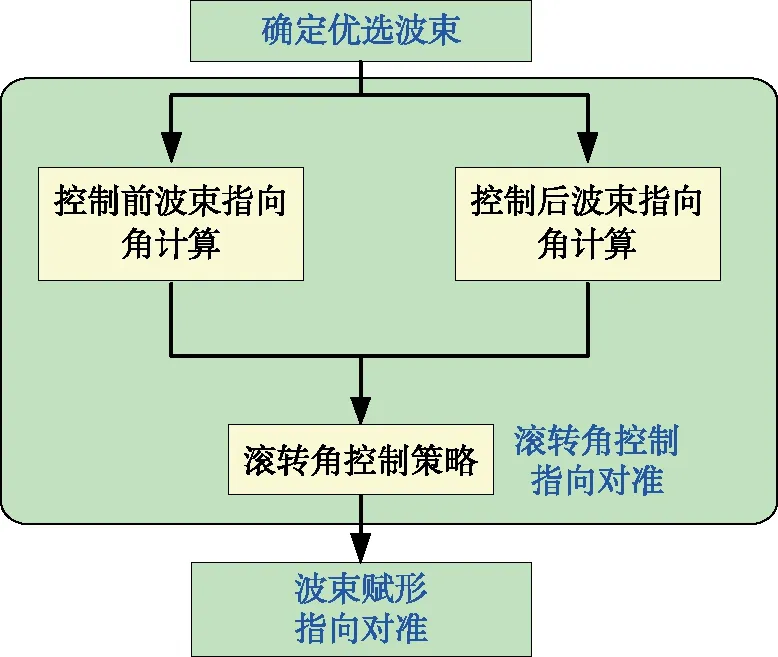
图3 短报文波束对准实现过程Fig.3 The process of the short message beam alignment
2.1 对准原理
为保证抗干扰能力,目前弹上短报文天线多采用多阵元对称设计,短报文接收天线法向矢量与弹体Y轴平行,接收天线法向矢量nR与短报文发射天线法向矢量nT间的夹角为β。当转动弹体使波束指向角(短报文发射天线法向矢量与接收天线法向矢量的和矢量n与星弹相对距离矢量r的夹角)最小时,即短报文波束指向与该和矢量的夹角最小,认为短报文波束完全实现了指向对准,如图4所示。目前中远程空空弹大多采用STT(skid-to-turn,侧滑转弯)控制,3个通道可以单独控制,为在不影响导弹飞行轨迹的基础上实现短报文波束对准,仅实时对滚动角进行控制,以保证星弹相对距离矢量r相对短报文发射天线法向矢量与接收天线法向矢量的和矢量n之间的张角尽可能小。
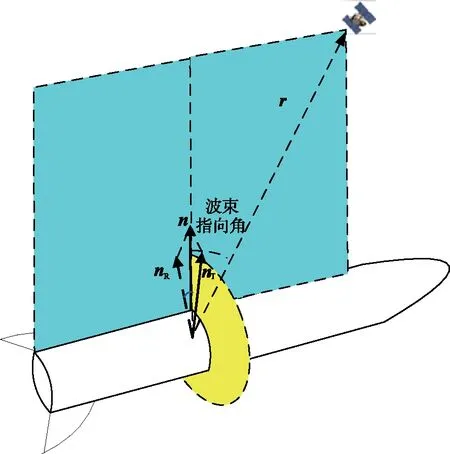
图4 短报文波束对准示意图Fig.4 The sketch of the short message beam alignment
2.2 对准方法
2.2.1优选波束确定
北斗系统短报文调制在5颗GEO卫星上,5颗GEO卫星定点分布在赤道上空。对准前可以结合当前导弹位置(经度、纬度、高度)、导弹姿态(俯仰、偏航、横滚)、5颗GEO卫星位置、卫星信号能量等参数确定用于短报文通信的优选波束(卫星)。每颗GEO覆盖一定区域,根据导弹位置查表可确定优选波束。每颗GEO卫星对应的波束号如表1所示。
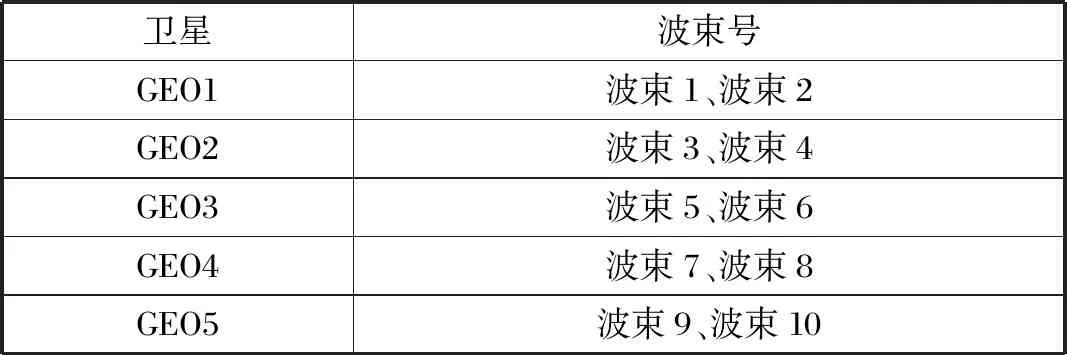
表1 波束号与卫星对应关系Tab.1 The correspondence of the beam numbers and the satellites
2.2.2滚转角控制波束指向对准
1) 星弹相对距离矢量计算
确定优选波束后,查表1得到用于短报文通信的卫星。由于短报文卫星为GEO卫星,位置基本不变,结合导弹位置计算可得到地心地固坐标系下星弹相对距离为
(1)
2) 滚转角控制前波束指向角计算
将地心地固坐标系下星弹相对距离矢量re转换至弹体坐标系,则有
(2)

计算可得滚转角控制指向对准前波束指向角为
(3)

3) 滚转角控制的目标滚转角计算
(4)
(cxsinϑcosψ-cycosϑ-czsinϑsinψ)sinφm=-(cxsinψ+czcosψ)cosφm
(5)
求解式(5)可得
(6)
式中:ϑ为导弹俯仰角;ψ为导弹偏航角;φm为导弹滚转角。
由于接收天线法向矢量与短报文发射天线法向矢量夹角为β,故实现短报文波束指向对准,使短报文发射天线法向矢量与接收天线法向矢量的和矢量与星弹相对距离矢量夹角最小的目标滚转角为
(7)
式中:φc为目标滚转角。
4) 滚转角控制后波束指向角计算
将地心地固坐标系下星弹相对距离矢量re转换至滚转后的弹体坐标系得
(8)
式中:rb1为滚转后的弹体坐标系星弹相对距离矢量。
计算滚转角控制指向对准后波束指向角得
(9)

5) 滚转角控制策略
根据指向对准前后计算的波束指向角以及目标滚转角,本文设计了滚转角控制策略,实时对导弹滚转角进行控制以实现指向对准。每次控制前,先根据导弹和卫星的位置和姿态计算出目标滚转角,比较当前滚转角和目标滚转角,以小于1°的步进向目标滚转角进行滚转角控制,具体控制策略设计如下:

图5 指向对准滚动角控制策略Fig. 5 The rolling angle control strategy of the beam alignment
2.2.3波束赋形指向对准
对导弹仅进行滚转角控制只能使波束指向角尽可能小,难以完全实现短报文发射天线法向矢量与接收天线法向矢量的和矢量与星弹相对距离矢量完全重合。因此,基于某空空型号短报文多阵元接收天线的特性,本文又提出将波束赋形自适应算法用于短报文接收,通过各阵元接收增益调节,多阵元接收天线合成方向图在短报文波束方向上增益最大,等效实现短报文波束的二次指向对准,保证最优的接收效果。
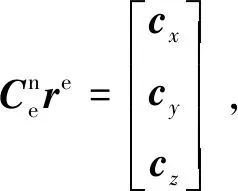
以四阵元接收天线的短报文接收机为例,波束赋形自适应阵列模型如图6所示[6],每一个阵元都赋以一个可调整的权,每一个阵元的权系数都可以由自适应算法来确定。自适应天线阵可以通过算法得到一组权向量,使天线方向图主瓣对准期望方向,即短报文波束来波方向[7]。
图6 波束赋形自适应阵列模型Fig.6 The model diagram of the adaptive beam-forming array
(10)
式中:xi(t)(i=1…4)为各阵元输入信号;X(t)为输入信号矩阵。
阵列输出信号:
(11)
式中:S(t)为阵列天线输出的合成信号;wi为各阵元加权系数;W为各阵元加权系数矩阵。
矢量信道中天线阵的方向函数向量为
V(θ)=[g1(θ),g2(θ)e-jψ2(θ),g3(θ)e-jψ3(θ),g4(θ)e-jψ4(θ)]T
(12)
式中:gi(θ)(i=1…4)为各阵元输入信号幅值;ψi(θ)(i=2…4)为各阵元输入信号相位;θ为输入信号接收角度。
自适应天线阵列的方向图函数为
FW(θ)=|WTV(θ)|
(13)
根据导弹位置和姿态计算出的波束指向角可确定主波瓣形状和天线期望方向图函数Fd(θ),采用基于最小均方差准则的综合方法,找出一组复权向量,使加权方向图在离散角度点θi上与期望方向图的均方误差E最小,即
(14)
式中:f(θi)为θi方向的强度函数。
根据主瓣方向和形状,设Fd(θi)的副瓣电平为0,θ01、θ02、θ03为所要求的零点位置,可得
FW(θ0i)=WTV(θ0i)=0
(15)
根据式(14)的限制,由拉格朗日多项式可得

(16)
式中:γ表示拉格朗日乘子向量;h=[0,0,0]T;C=[V(θ01),V(θ02),V(θ03)]T。
由此可得满足公式(14)最小条件的最优权向量。某远程空空型号采用此方法后,原天线方向图边界处的增益可接近中心位置处的增益,约提高8~10 dB。
3 仿真验证
为验证设计的有效性,利用某远程空空导弹飞行弹道进行了数字仿真。该轨迹中导弹在高度12 km发射,整个飞行时间近483 s,采用高抛弹道设计,俯仰角变化较大,滚转角稳定控制在0°左右,飞行轨迹如图7所示。
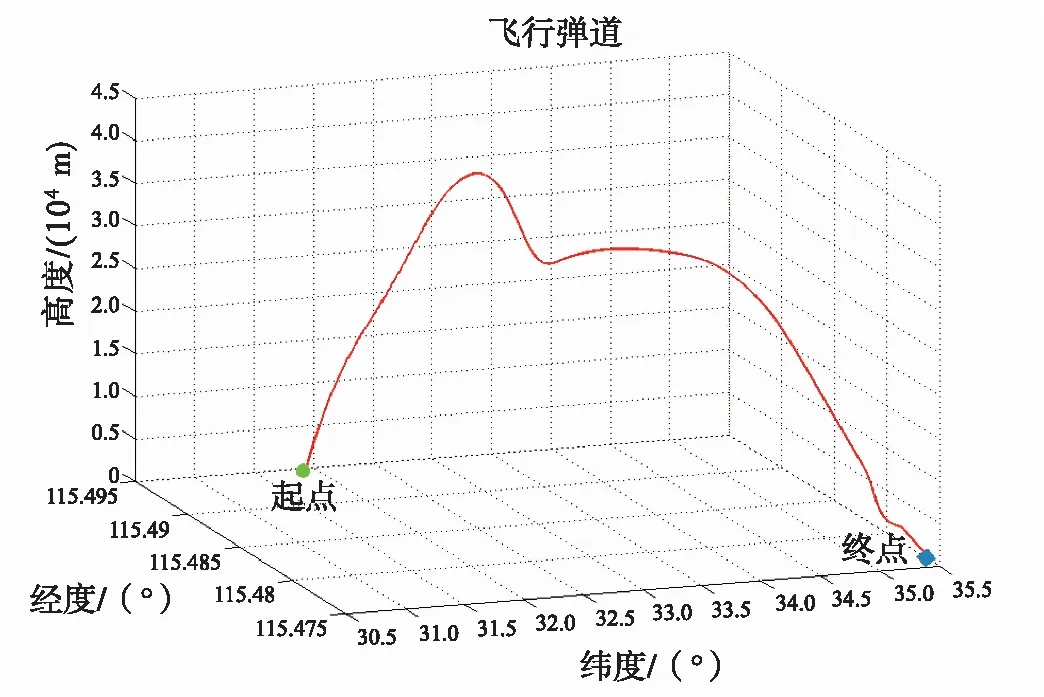
图7 仿真所用弹道轨迹Fig.7 The simulation trajectory
根据该弹道,对采用本文第2章所设计的波束指向对准前后的波束指向角进行了仿真,仿真中参照某型空空导弹短报文接收机性能,将接收角度门限设为60°,仿真结果如图8所示。由于飞行过程中导弹机动较大,且在导弹飞行区域中优选波束为GEO2卫星的波束4,若不采用滚转角控制的波束指向对准技术,导弹飞行过程中波束指向角长时间均大于接收角度门限,无法保证短报文数据链正常通信。采用滚转角控制后,波束指向角大大减小,小于接收角度门限的时间段显著增加。图8中400 s之后波束指向角的大幅波动是由于飞行轨迹设计了回收段弹道,导弹会以-80°俯仰角俯冲,接近落点时拉起至俯仰角0°左右。

图8 滚转角控制前后波束指向角Fig.8 The beam alignment angles before and after the rolling angle control
实现滚转角控制后,采用了2.2.3节的波束赋形算法,又使短报文波束方向上接收增益提高,短报文通信更加可靠。图9给出了实现滚转角控制和波束赋形指向对准前后短报文接收能力的对比。图9中,1表示波束指向角小于60°,可正常接收;0表示波束指向角大于60°,无法稳定接收。从图9中可见,通过滚转角控制指向对准,可通信时间由73%提升至88%;进一步波束赋形指向对准后,可通信时间可提升至100%。
采用滚转角控制的方法需要实时控制导弹滚转角以寻找最优的波束指向角,实际飞行过程中由于诸多因素的限制,导弹不能大范围地频繁滚动,因此该方法在某些场景下使用时可能受限。因此,本文又设计了波束赋形的方法,在滚动角控制受限的情况下可以一定程度地解决波束指向对准问题。
与此同时,由于短报文数据通过卫星转发,长距离传输存在时间延时的问题,给实际应用带来了一定的限制。目前,多次实测短报文正常通信延时约1~2 s,故作为制导数据链进行工程应用时可通过实时外推的方法对时延进行补偿。
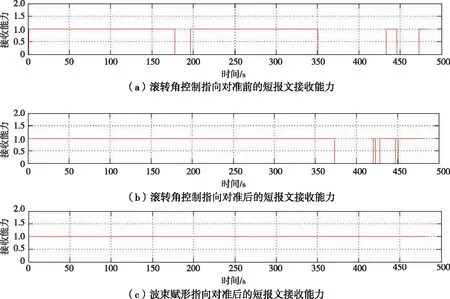
图9 指向对准前后短报文接收能力Fig.9 The receiving ability of the short message data link before and after the beam alignment
4 结束语
本文首先以空空导弹为背景,提出了一种新的短报文数据链技术,并对采用该技术的空空导弹作战模式进行了探讨。该技术可以实现中远程空空导弹的超视距攻击能力和弹群协同作战能力,为第5代空空导弹网络化作战模式提供有力支撑。之后,结合某中远程空空导弹型号应用中出现的问题,又提出了一种基于滚转角控制和波束赋形联合的短报文波束指向对准方法。通过数字仿真,证明了采用该方法可使短报文在导弹飞行全程稳定通信,为短报文数据链应用提供技术支撑。以上研究成果可为短报文数据链在中远程空空导弹上的应用提供理论指导。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:24
军民两用技术与产品(2021年10期)2021-03-16 06:05:10
中国交通信息化(2020年7期)2021-01-14 03:18:14
北京航空航天大学学报(2019年9期)2019-10-26 02:30:12
文萃报·周二版(2019年28期)2019-10-21 09:16:12
当代陕西(2018年12期)2018-08-04 05:49:20
北京航空航天大学学报(2017年3期)2017-11-23 05:14:54
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
现代兵器(2017年5期)2017-06-01 20:30:09
探测与控制学报(2015年4期)2015-12-15 15:01:00
