
基于实测数据转换的红外场景修正方法
2019-04-26 11:00张小威
空天防御 2019年2期
张小威,李 凡,郭 叶,杨 扬,张 励
(上海机电工程研究所,上海 201109)
0 引 言
红外成像制导技术的发展对半实物仿真过程中场景模拟的逼真度与复杂度提出了更高的要求。实际工程中往往通过外场实测数据结合内场仿真试验标定与校准,实现模拟场景与外场靶试场景红外辐射特征的统一。
红外场景仿真过程中,场景建模软件生成数字场景图像,驱动红外场景模拟器(后文简称模拟器)生成物理场景,生成的物理场景与真实场景的红外辐射特性的相似性程度是衡量仿真系统可信度的关键指标。为了获得更加逼真的仿真效果,现阶段大部分研究机构都是从更加精细化的场景模型、更加精准的模拟器、更加规范的标定与校准这三个方面来提升仿真置信度。为了在简化场景建模过程同时又能生成逼真度高的红外物理场景,本文提出一种利用实测数据对红外场景快速精确建模的方法,通过外场实测数据获得模拟器的驱动数据,生成与外场靶试辐射特性一致的红外场景。
李奇提出的红外背景图像数据的处理和转换方法[1]主要通过用标准黑体对热像仪标定的方式将背景图像数据转换为红外场景仿真中所需要的辐射亮度数据。张健等提出的基于实测数据的反演方法[2]主要通过数据映射的方式利用测量图像生成红外图像。宋福印等提出了一种基于实测数据参数拟合求解大气透射率的方法[3]。李敏等提出了一种基于温差扰动的红外场景生成方法[4],将图像平均灰度与环境温度关联,生成不同时段的红外场景。目前,主流的基于实测数据的场景反演方法是通过数据标定、去除大气效应、去除成像效应、去除反射效应等步骤反演计算出场景的本征辐射强度数据[5-6]。但是,在仿真过程中并不能直接将本征辐射强度数据作为模拟器的驱动量,需经过大气渲染、模拟器温度标定、灰度量化等步骤才能生成模拟器对应的驱动图像数据。为了简化计算流程,本文提出将实测数据直接转换为模拟器的驱动图像数据的红外场景修正方法,建立“实测数据-驱动数据”的转换模型与修正模型,仿真生成与外场靶试辐射特性一致的红外场景。
1 修正方法原理
基于实测数据转换的红外场景修正方法包含数据转换、迭代修正及相似性评估3个部分,其原理如图1所示。实测数据由外场靶试遥测获得,成像导引头在跟踪目标状态下将复杂场景的红外辐射信息转化为电平信号,再经过灰度量化获得实测图像。驱动图像是模拟器的灰度输入图像,其对应像元的灰度量作为驱动模拟器中对应像元的控制量。转换模型将导引头外场跟飞试验采集的实测图像序列(由多帧实测图像组成)转化为模拟器的驱动图像序列(由多帧驱动图像组成),生成红外物理场景。修正模型以模拟器和探测器观测获得的仿真图像与实测图像的误差作为输入,生成修正量作为驱动图像的补偿量,通过反复迭代,仿真图像与实测图像的误差趋近于零。相似性度量模型对仿真图像与实测图像的相似性作定量分析。
实测图像序列由分辨率、视场大小、成像距离、相对视线角等相关参数来描述。实测图像示例如图2所示,该图像存在一定的成像噪声以及边角效应。

2 转换模型
红外成像仿真过程中,目标辐射强度、尺寸、形状以及目标与背景的对比度等物理信息的准确模拟至关重要。导引头实测图像对应的视场大小与模拟器驱动图像对应的视场大小存在差异,并且实测图像的灰度量与真实场景辐射强度之间的关系是非线性的,驱动模拟器的灰度控制量与其输出的物理场景辐射强度之间的关系也是非线性的。若采用非线性拟合方式来消除这些非线性特征难免会造成误差,理论上消除误差最好的方法是“一一映射”。
实测图像转换为模拟器驱动图像的流程如图3所示,首先消除实测图像Im的边缘效应,再经过缩放处理,映射为驱动图像Id中h行l列的部分区域,驱动图像Id中未被填充的边缘区域可采用背景均值填充。归一化的驱动图像叠加目标辐射强度对应的灰度值,即可获得表征场景辐射强度信息的驱动图像。

图3 实测图像转换为模拟器驱动图像的流程Fig.3 The process of transforming measured images into simulator driving images
1) 边角效应去除
导引头光学系统的圆形入瞳孔径是导致边角效应的直接原因,设导引头成像分辨率为M×N,第k帧实测图像边角坐标位置(i,j)的像元灰度值为g(i,j),定义该点到视场中心的距离为r(i,j),则有
(1)

2) 场景填充
填充到模拟器驱动图像中所占的行列数h、l分别为
(2)
(3)
采用双线性内插法将大小为M×N的实测图像缩放为大小为h×l的图像,利用MATLAB工具箱可快速实现该过程。
3) 边缘均衡
场景填充后,驱动图像对应的视场大于实测图像,其边缘部分未被填充,边缘均衡主要解决该问题。为避免动态仿真过程中探测器探测到的场景边缘辐射特性出现突变,采用背景均值作为驱动图像边缘像元的填充灰度值。
4) 图像归一化
通过去除边角效应、场景填充、边缘均衡转换获得的驱动图像仅体现目标尺寸、形状及目标与背景的对比度信息,并不包含红外辐射强度信息,可通过归一化处理形成标准驱动图像,转换示例如图4所示。
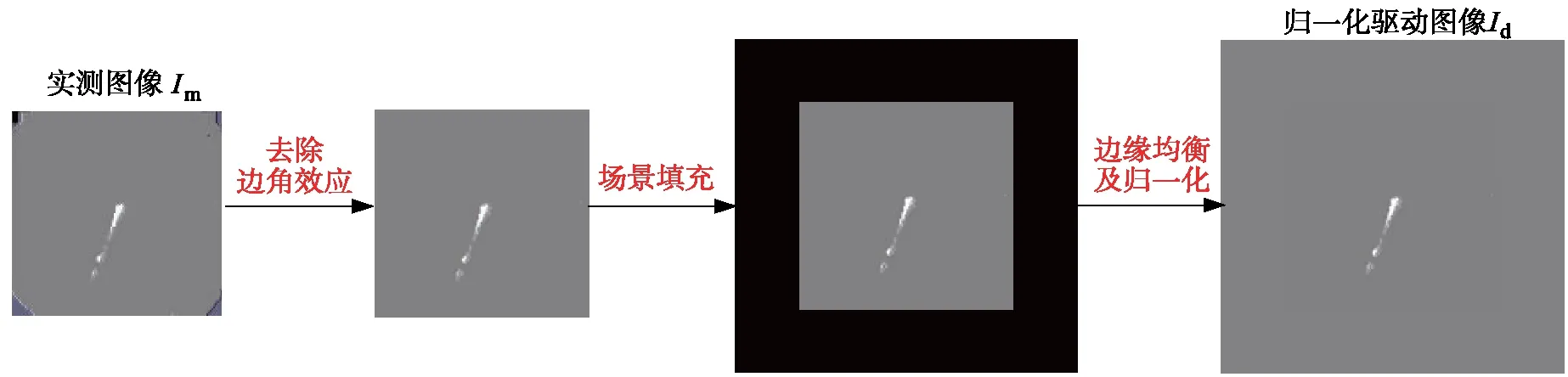
图4 实测图像转换为驱动图像示例Fig.4 An example of transforming a measured image into a driving image
5) 目标辐射曲线叠加
归一化驱动图像叠加目标辐射曲线,进而生成可驱动模拟器的驱动图像。目标辐射曲线仅表征靶试弹道中不同弹目距离下的红外目标辐射强度信息,是对应驱动模拟器的灰度控制量。设计逐点自动校准算法,将实测数据作为自动校准算法的输入,自动转化为“灰度值-弹目距离”的红外目标辐射曲线,其校准流程如图5所示。
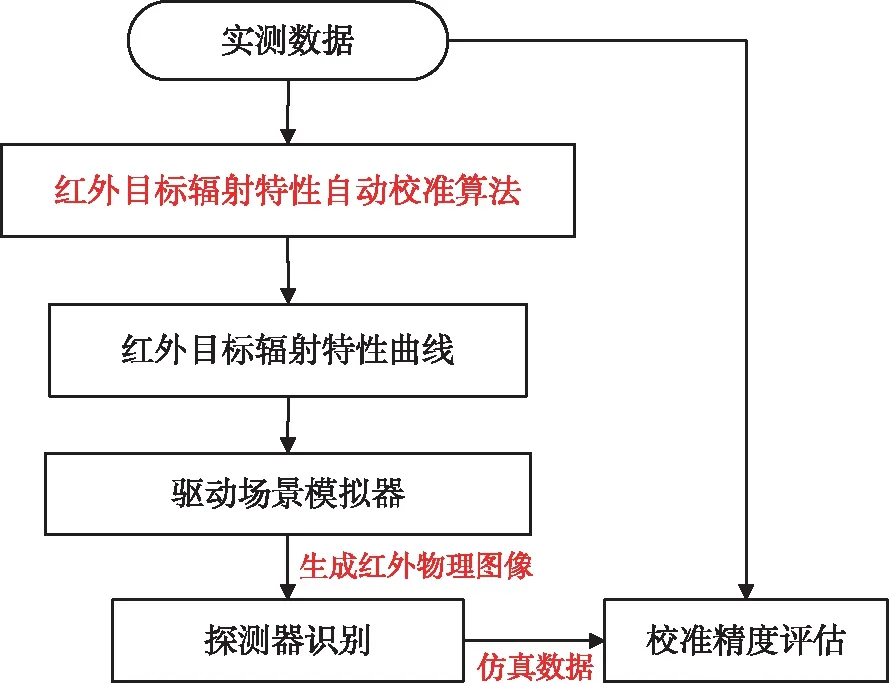
图5 红外目标辐射特性校准流程Fig.5 The process of correcting infrared target radiation characteristics
3 修正模型

本文在首先确保辐射强度特性近似一致的原则下,以弹目距离作为匹配索引,从驱动图像序列中选取每一帧对应的驱动图像,这种索引方式存在一定的弹目相对视线角匹配误差。为确保仿真场景的目标形状、尺寸和辐射强度等物理特性与靶试场景数据尽可能一致,建立修正模型,其原理如图6所示。
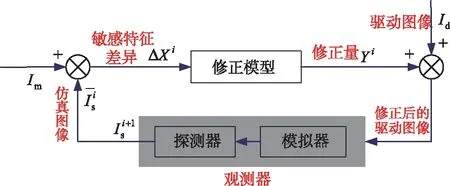
图6 修正模型原理Fig.6 The principle diagram of the correction model

1) 目标辐射强度修正
理论上随着弹目距离的减小,目标辐射强度逐渐增强,且与弹目距离的平方成反比。由于探测器成像系统效应及噪声影响,表征目标辐射强度的实测数据呈现出一定的抖动特性。为保证仿真模拟精度,需对实测数据作平滑处理以消除数据抖动及突变的采样点。建立目标辐射强度E随弹目距离变化的映射关系为
(4)
式中:WT为零视距下目标本征辐射强度;R为弹目距离;τ(R)为与R相关的系数。采用高阶拟合方法获得实测数据的平滑曲线,如图7所示。

图7 实测数据平滑拟合结果Fig.7 The smooth fitting result of the measured data
将平滑后的目标灰度实测数据转化为基于模拟器的目标辐射强度曲线,以该曲线作为基准曲线进行拉偏修正。具体实现方法为:将基准曲线乘以相应的增益系数k,例如k=1.5时,目标辐射强度曲线拉偏结果示例如图8所示。

图8 目标辐射强度曲线拉偏结果示例Fig.8 An example of target radiation intensity curve deviation
2) 目标尺寸修正
探测器识别的目标区域像素点的个数表征目标尺寸特征信息。在远距离弱小目标状态下,目标区域像素点个数一般小于20个。以电阻阵场景模拟系统为例,其弥散圆大小约为单个像元尺寸(65 μm),导致所模拟的目标尺寸会有一定的误差。基于修正模型,对驱动图像的目标区域进行修正,采用膨胀腐蚀算法增大或减小目标边缘,经过多次迭代修正,目标尺寸特征误差趋近于0。
3) 目标与背景的对比度修正
由于探测器与模拟器输入输出响应具有非线性特征,生成的红外场景图像中目标与背景的对比度可能存在一定的失真。采用非线性拉伸算法,设计灰度变换函数,对驱动图像中每一个像素点的灰度进行拉伸变换,减小或增大目标与背景的对比度。灰度变换函数为
ρ=cgγ
(5)
式中:g为图像中某像元灰度值;c和γ为正系数;ρ为该像元变换后灰度值。0<γ<1时,低灰度区扩展,高灰度区压缩;γ>1时,低灰度区压缩,高灰度区扩展。当γ取不同值时,灰度变换函数不同灰度区域压缩扩展对比如图9所示。γ=0.6时驱动图像灰度变换前后对比示例如图10所示。
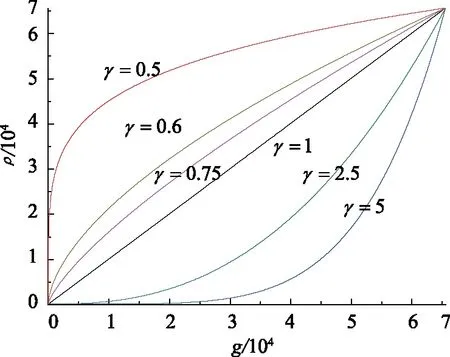
图9 灰度变换函数不同灰度区域压缩扩展对比Fig.9 The comparison of the compression and expansion of different gray areas in the gray transformation function
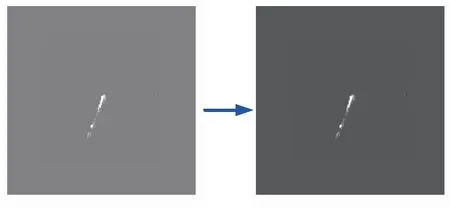
图10 γ=0.6时驱动图像灰度变换前后对比示例Fig.10 An example of the comparison of the driving images before and after gray transformation when γ=0.6
4 相似性度量模型
仿真过程中探测器的技术状态与靶试试验时探测器的技术状态相同。结合探测器目标检测与识别的敏感特性,对仿真图像与实测图像进行相似性度量,即可定量评估模拟器生成的物理场景与靶试场景的相似性。
1) 目标辐射强度相似性度量

(6)
外场实测与内场仿真的目标辐射强度变化曲线的相似性比较如图11所示,计算得到的相同弹目距离下目标辐射强度相似度如图12所示。
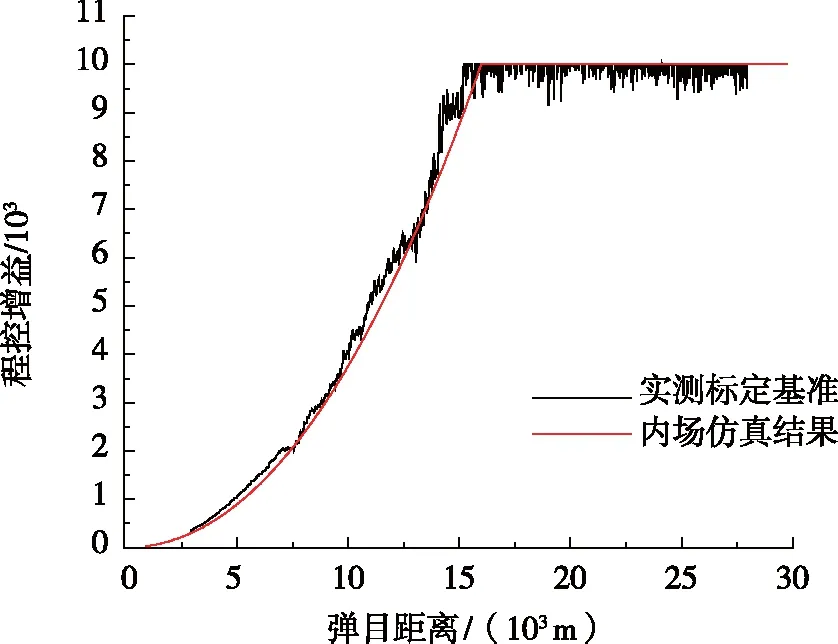
图11 目标辐射强度变化曲线的相似性比较Fig.11 The similarity comparison of the target radiation intensity curve
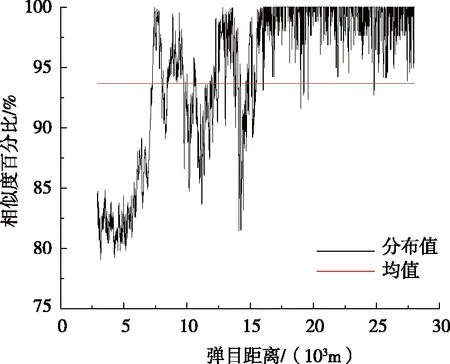
图12 目标辐射强度相似度分布计算结果Fig.12 The result of calculating the similarity of the target radiation intensity
2) 目标尺寸特征相似性度量
对于成像体制导引头而言,目标尺寸的度量为统计目标边界内部(包括边界上)的像素的数目。将目标最小矩形N×M区域内的目标与背景二值化,目标像素点为1,背景为0,则弹目距离为R时目标尺寸AR的度量为
(7)

(8)
3) 目标与背景的对比度相似性度量
图13为目标与背景区域划分示意图,定义目标区域T为目标边界内部(包括边界上,图中红色框),背景区域B的长宽分别为包含目标最小矩形区域长宽的2倍,并除去目标区域(蓝色框去除红色框后的区域)。
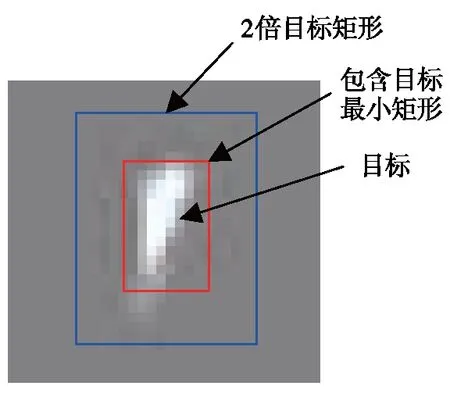
图13 目标与背景区域划分示意图Fig.13 The schematic diagram of dividing target and background area

(9)
式中:CR可采用均值度量Δμ、均方根度量S两种方法计算。
当采用均值度量法[7-8]时,目标区域T和背景区域B的灰度均值的差Δμ为
Δμ=|μT-μB|
(10)
式中:μT、μB分别为目标区域T、背景区域B的灰度均值。
当采用均方根度量[7-8]时,设目标区域T的灰度标准差为σT,则均方和根度量S为
S=[(μT-μB)2+σT2]1/2
(11)
5 结束语
本文提出了一种基于实测数据转换的红外场景修正方法,该方法有效利用了外场实测数据,通过转换模型能快速获取红外场景模拟器的驱动图像,并通过修正模型对该驱动图像进行迭代修正。修正后的驱动图像作为模拟器的输入,可生成与外场靶试辐射特性一致的红外物理场景。通过相似性度量模型定量分析了实测结果与仿真结果之间的相似性,结果表明,该方法能较为准确地模拟目标辐射强度、尺寸形状、目标与背景的对比度等特征。
猜你喜欢
兵器装备工程学报(2022年8期)2022-09-13
北京航空航天大学学报(2022年6期)2022-07-02
环球时报(2022-05-23)2022-05-23
汽车实用技术(2022年5期)2022-04-02
航天返回与遥感(2022年1期)2022-03-09
金桥(2021年4期)2021-05-21
故事作文·高年级(2021年4期)2021-05-06
集装箱化(2021年1期)2021-04-12
华人时刊(2020年23期)2020-04-13
中国信息技术教育(2020年2期)2020-02-02
