一种圆筒型转子的中空型超声电机的研制
2019-04-20 03:16:12陈金燕
压电与声光 2019年2期
王 楠,陈 超,陈金燕
(南京航空航天大学 机械结构力学及控制国家重点实验室, 江苏 南京 210016)
0 引言
超声电机利用压电陶瓷逆压电效应激发弹性体的受迫振动,通过定、转子的摩擦作用将定子的微观振动转化为转子的宏观直线运动或旋转运动。与传统电磁电机相比,其具有低速大力矩、无电磁干扰、位移分辨率高及结构紧凑等特点[1],在精密驱动,航空航天等领域应用前景好,近年来发展很快。但随着应用领域的不断推广,也出现了一些局限,如某些飞行器舵机需要电机具有中空结构,而现有超声电机以实心轴输出为主。这使电机在系统集成过程中总需要一系列的中间传动机构进行输出,系统体积和质量变大,且电机的输出速度和系统效率降低。虽已有学者提出中空型超声电机模型[2],但目前中空电机大多在现有超声电机的基础上将空心转子与原实心轴融合设计。采用中空转子进行力和速度的输出(内圈输出),不方便前、后零部件的安装,且易隔断前、后零部件。因此,本文提出了一种新型的圆筒型转子的中空超声电机,同属于旋转行波型超声电机。该电机采用空心结构,外圈转子直接完成转速与转矩的输出,使用过程无需中间传动机构,提高了工作效率。分析其工作机理,利用有限元软件Ansys对定子结构进行模态计算和谐响应分析,进一步优化了定子结构尺寸,确定其最佳工作模态频率;制作了原理样机,并进行了相关的实验研究。
1 电机结构及工作原理
1.1 电机结构布局
图1为外圈输出的中空型超声电机的结构示意图。在现有行波型超声电机的基础上,定子取消了固定内环,进一步扩大空心结构,使腹板尺寸更短,抗过载能力有一定提高。转子采用刚性转子可保证定、转子的接触宽度以增大定、转子间的实际接触面积,提高工作效率。转子通过锁紧螺母、碟簧、轴承和摩擦片压紧在定子齿面上,并完成二者间预压力的施加。该设计结构简单,中心孔可用于穿过信号线、电源线、光路及完成零部件的安装与固定[3]。该中空型超声电机直接通过转子进行转速和转矩的输出,且转子可根据应用场合的实际情况进行结构融合设计,不需中间传动机构,进一步提高了工作效率,扩大了应用范围。
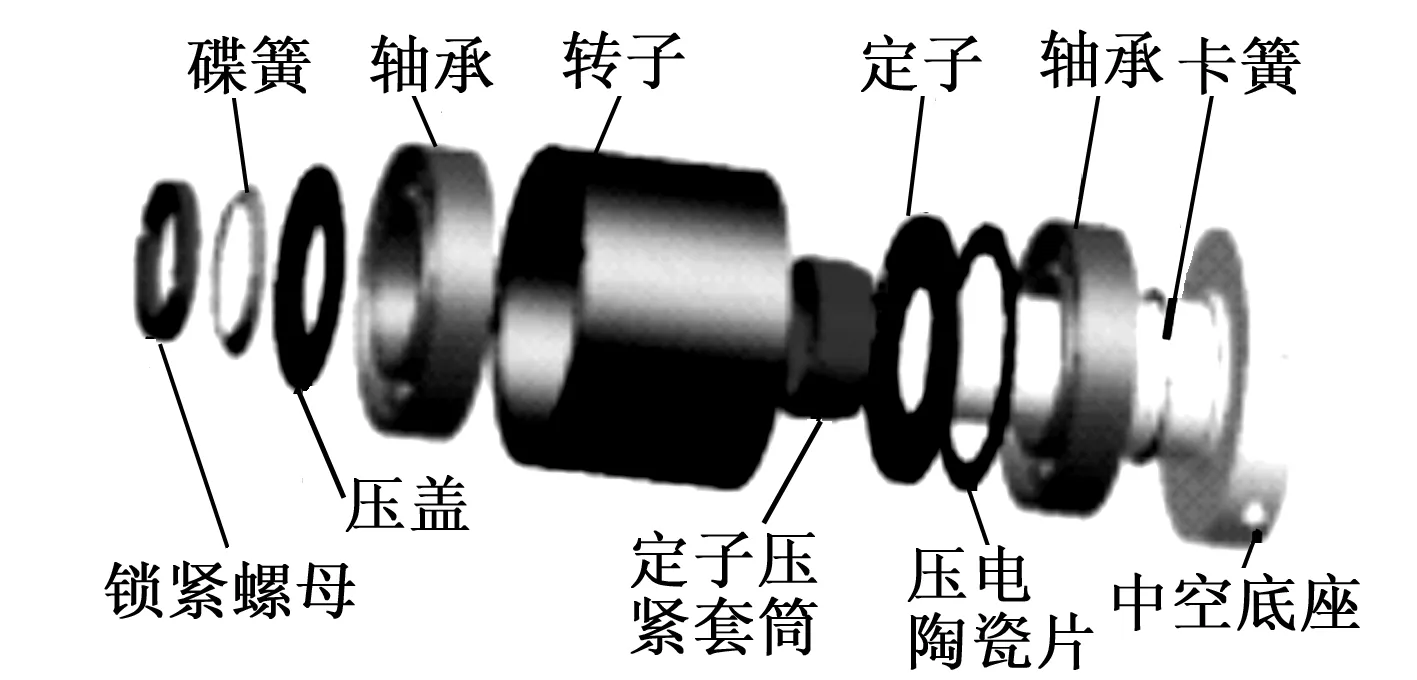
图1 中空型超声电机结构示意图
1.2 电机工作原理
该中空型超声电机选用的压电陶瓷片为环形压电陶瓷,沿厚度方向极化,分为A、B两相,这两相在空间上适当布置。压电陶瓷的极化和配置方式如图2所示。
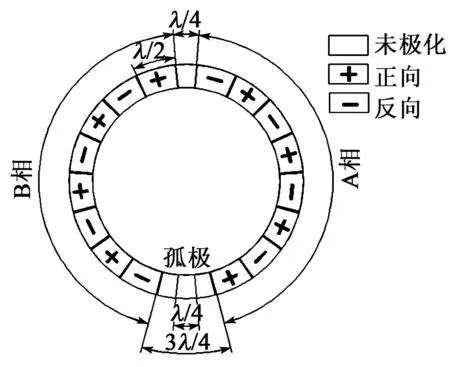
图2 压电陶瓷的和配置方式
当A、B两相施加相位差为90°的同频等幅交变电压时,在定子中会激发出两相幅值相等、时间、空间均相差90°的驻波[4],两相振型如图3所示。

图3 B09模态A、B相振型
两相驻波叠加后形成沿某一方向传播的行波,定子的齿状表面各质点会分别形成椭圆轨迹,在定、转子间预压力的作用下,将定子的微观振动转换为转子的旋转运动。电机运行机理如图4所示。通过定、转子间的摩擦作用带动转子旋转,从而输出一定的转速和转矩。
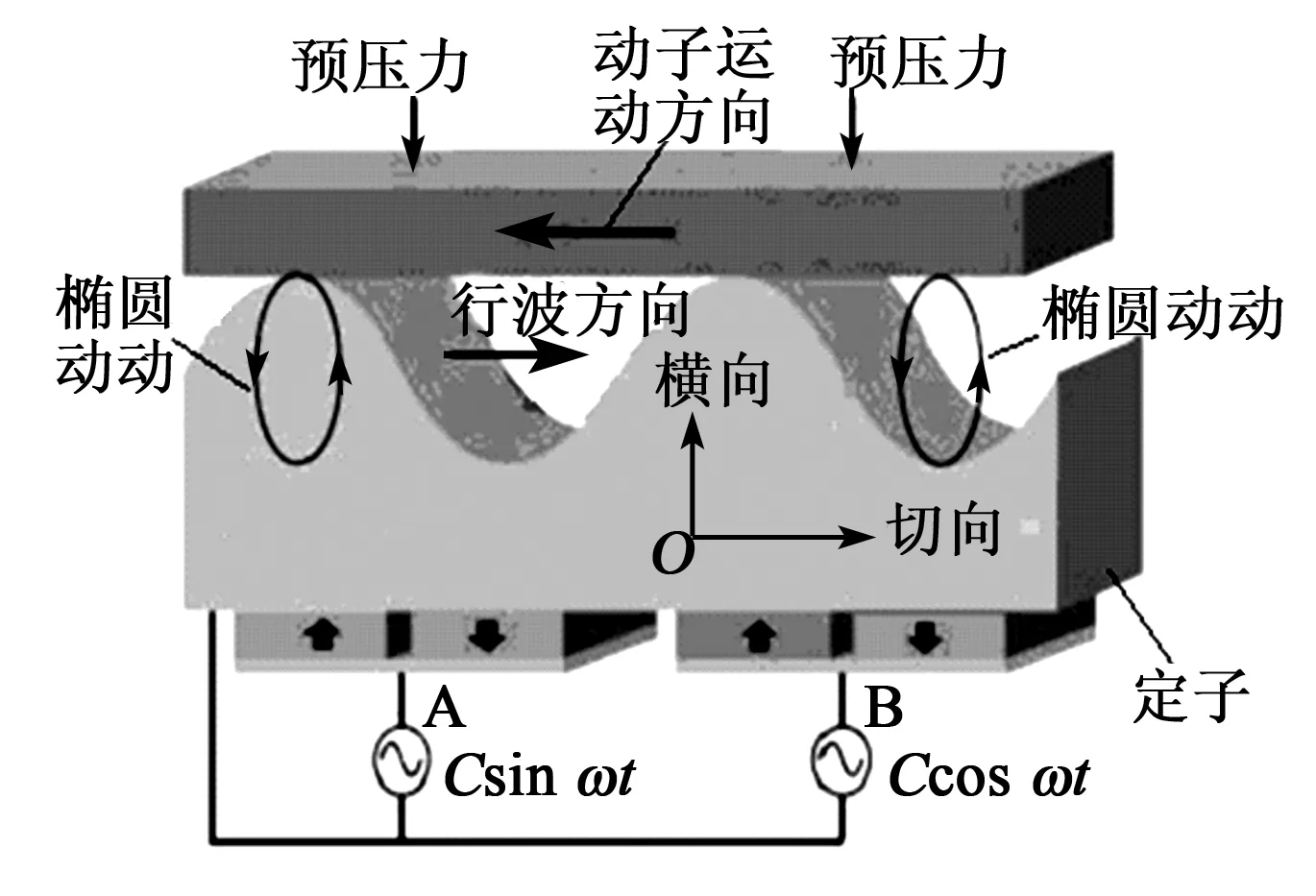
图4 电机运动机理图
2 定子结构设计与优化
定子是整个电机的核心部分,其完成能量的转换,并通过摩擦驱动转子转动,从而进行机械性能的输出[5]。原实心轴超声电机定子通过定子固定内环固定在底座上,由于本文所述电机为中空结构,腹板尺寸较小,所以对定子的夹持方式进行了重新设计。本设计以实心轴超声电机定子为原型,取消了固定内环,通过一个开有内螺纹的压紧套筒对定子进行轴向固定,同时在远离定子齿的腹板面开有六边形凹槽,与中空底座上的六边形凸台相配合对定子进行周向限位。本文将定子结构尺寸分为基体厚度L1、腹板高度L2、定子齿高L3和凹槽深度L44部分,如图5所示。
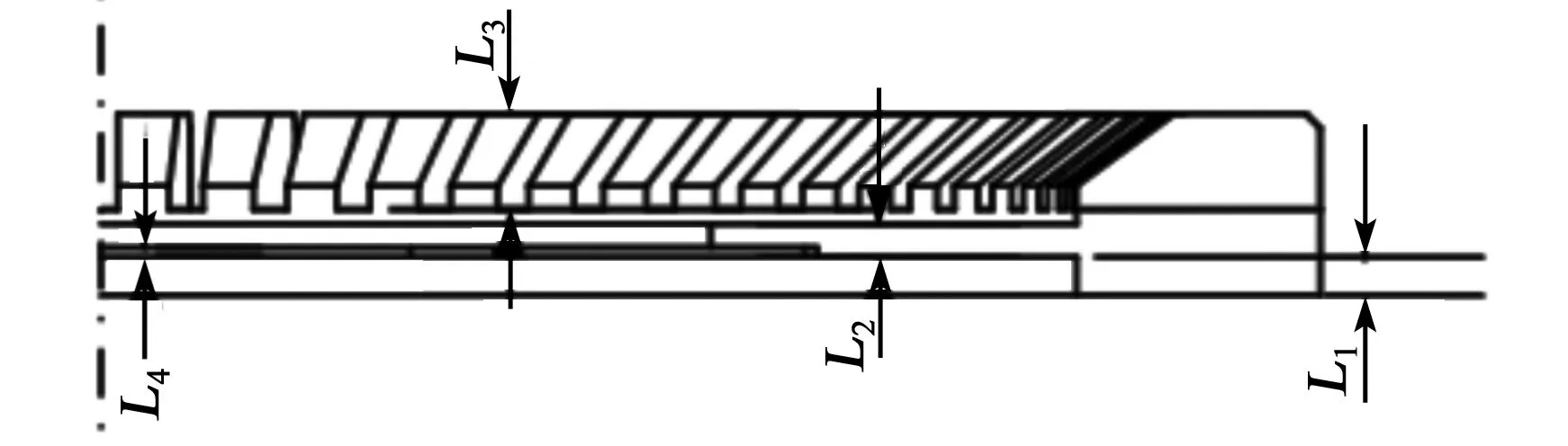
图5 定子结构图
利用Ansys软件对定子进行建模,并采用六面体主导的多分区方法进行网格划分。然后进行参数化的模态分析[6],分别确定各结构尺寸对B09模态频率的影响趋势。求解过程发现,B09模态前后始终存在两干扰模态,如图6所示。
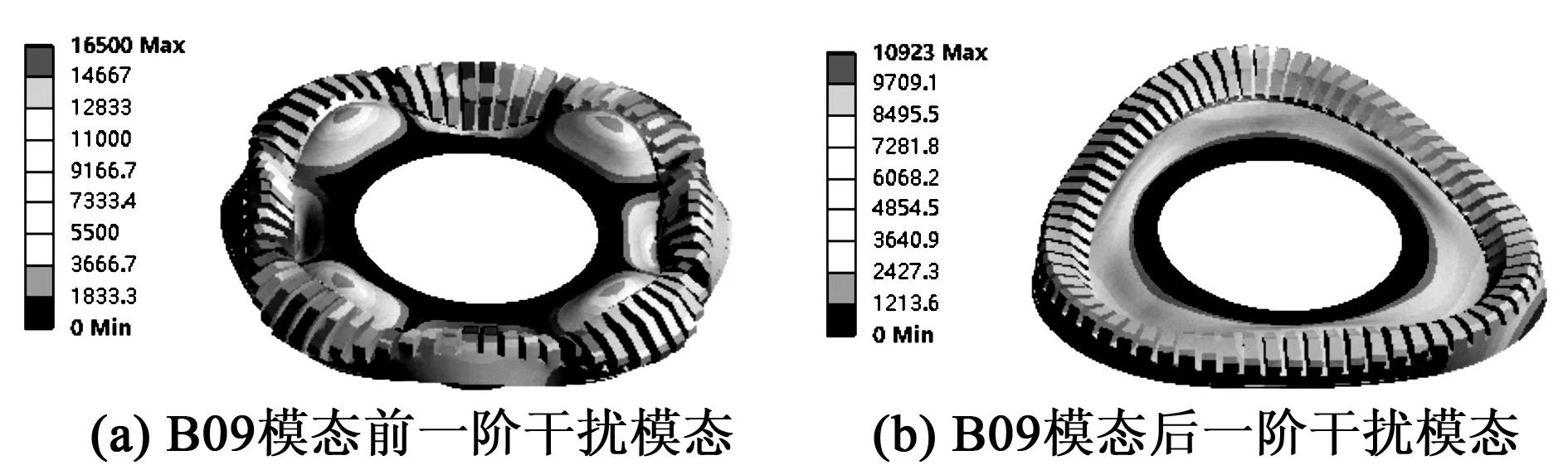
图6 B09模态前后一阶干扰模态
确定定子最佳工作模态时,首先采用摄动法,即改变尺寸的1%[6],求解得到上述结构尺寸对B09模态及其前后两干扰模态的灵敏度,如图7所示。

图7 模态频率对结构尺寸的灵敏度
由图7可看出,L1、L3对B09模态影响较大,L2、L4对干扰模态影响较小。通过优化L3、L2、L1等结构参数,进而获得较大的速度因子及较好的工作模态,最终确定其主要尺寸如表1所示。

表1 定子的主要参数
3 转子结构设计
提出的圆筒型转子的中空型超声电机,其工作结构(舵翼)与电机转子是一体设计的。本文所述转子采用刚性结构,如图8所示。定子与转子间的预压力通过锁紧螺母、碟簧、轴承施加。在飞行器发射过程,中空底座通过六边形凸台给定子提供向上加速度,定子推动转子向上加速,柔性转子腹板太薄,在高冲击环境下的表现差。而刚性结构使定、转子间的接触状况更好,即使在高过载的情况下,定、转子也能保证较好的接触宽度[8],如图9所示。这提高了二者间的接触摩擦力,使电机转速、转矩的输出更平稳,有利于提高电机寿命。此外,本文采用通过碟簧和刚性转子施加预压力的方式会提高电机的抗过载能力得到。
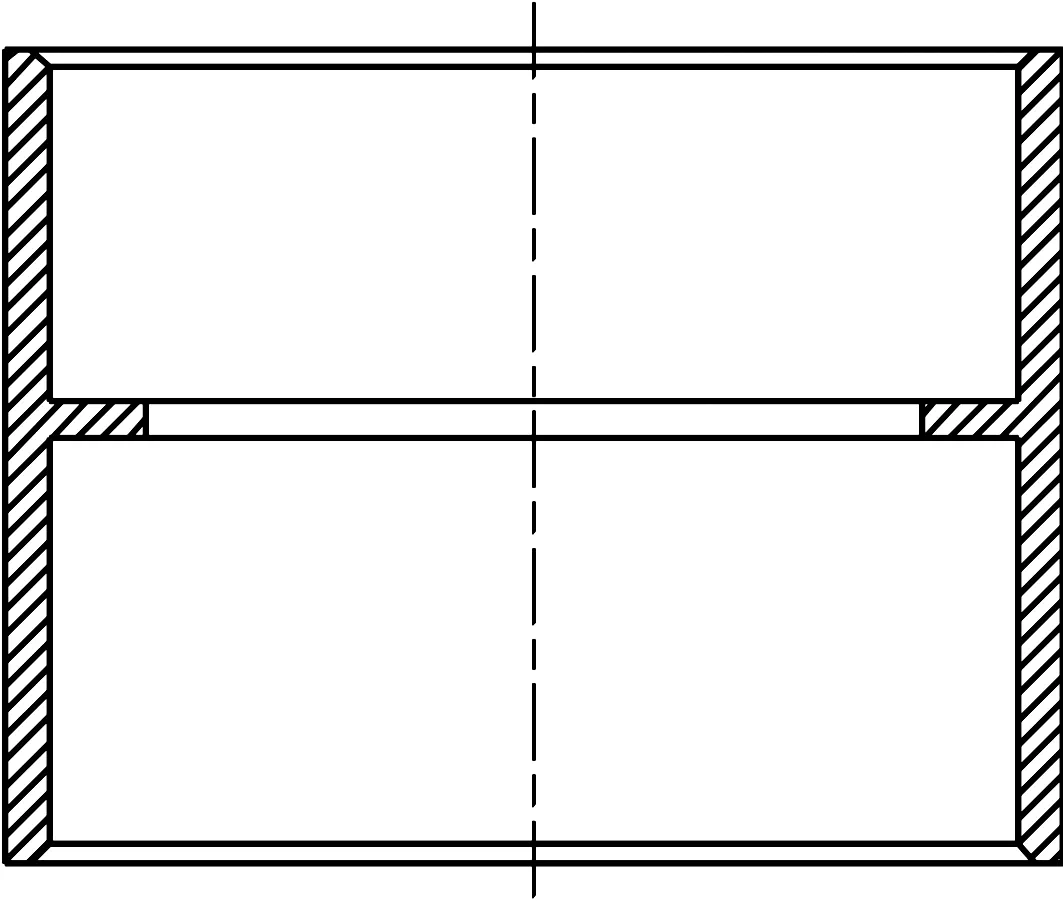
图8 转子结构图

图9 高过载下定、转子接触示意图
4 实验研究
根据设计的结构,优化并确定各尺寸参数后制作了原理样机,如图10所示。该样机的外形尺寸为∅60 mm×70 mm,质量约为400 g。

图10 电机实物图
4.1 定子模态实验
本文作者对加工好的定子进行了测振实验,利用PSV多普勒激光测振仪分别对A、B相进行扫频,定子两相的幅频特性曲线如图11所示。
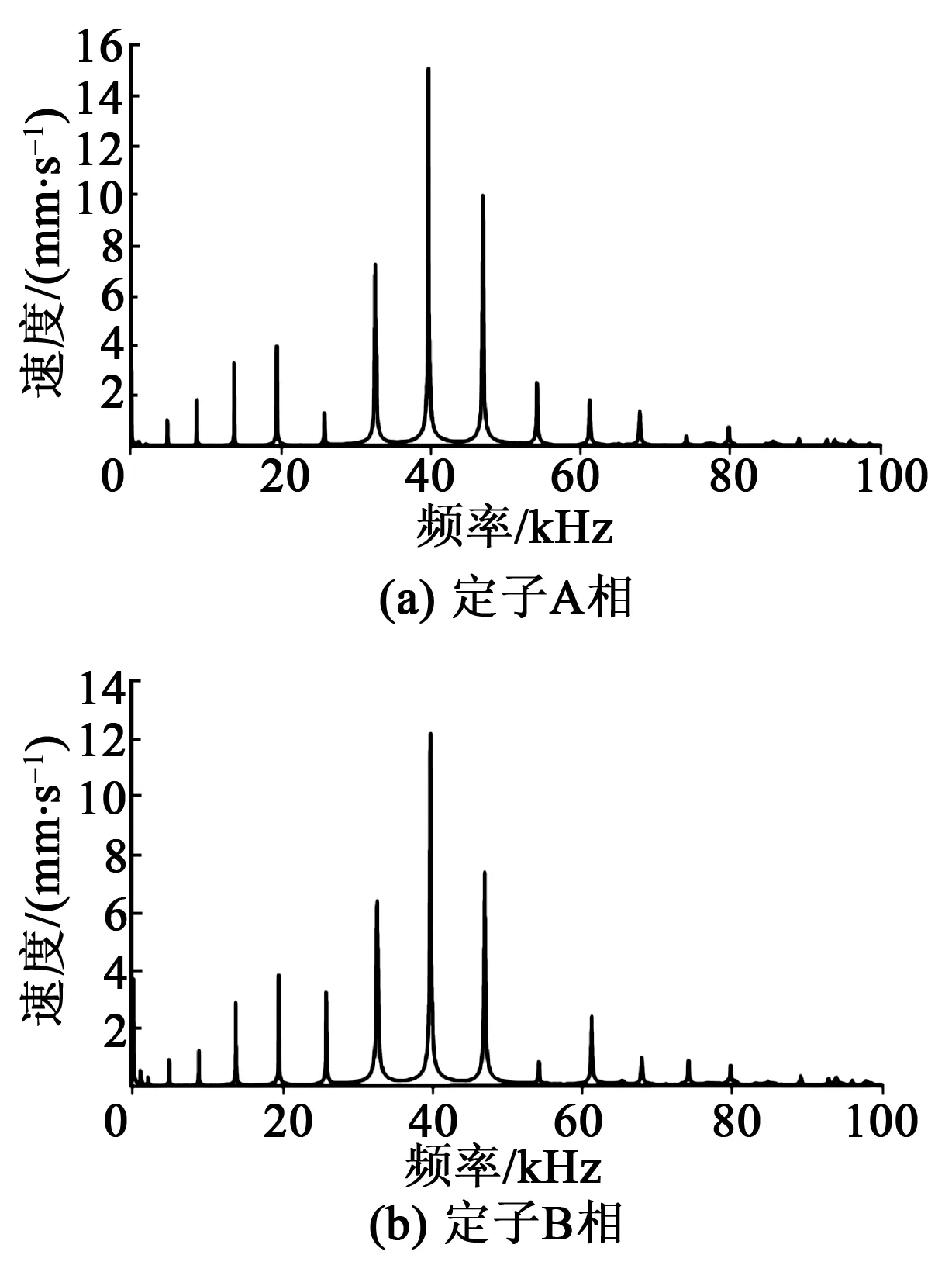
图11 定子A、B相频率响应特性
A、B两相B09模态频率与前、后干扰模态频率对比如表2所示。由表可知,该模态远离干扰模态,满足设计要求。定子A、B相被激发出B09模态时的频率分别为39.67 kHz、39.68 kHz,两相频率差为10 Hz,可满足频率一致性要求[9]。B09模态下定子顶端质点的振幅为2.078 μm,速度幅值为0.5 m/s,与仿真结果相仿。

表2 工作模态与干扰模态对比
4.2 电机性能测试
对装配好的电机设计并搭建了相应的测试平台,如图12所示。进行了一系列的性能测试,绘制了电机的负载特性曲线,如图13所示。该中空电机在激励电压峰-峰值450 V、频率40.2 kHz时,空载转速可达208 r/min,堵转力矩可达0.35 N·m。
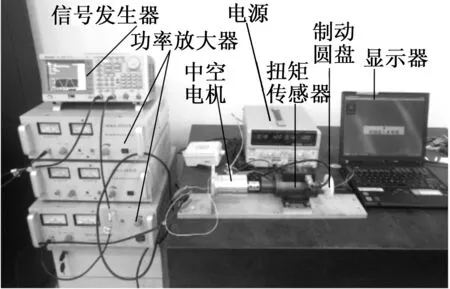
图12 中空型超声电机性能测试平台
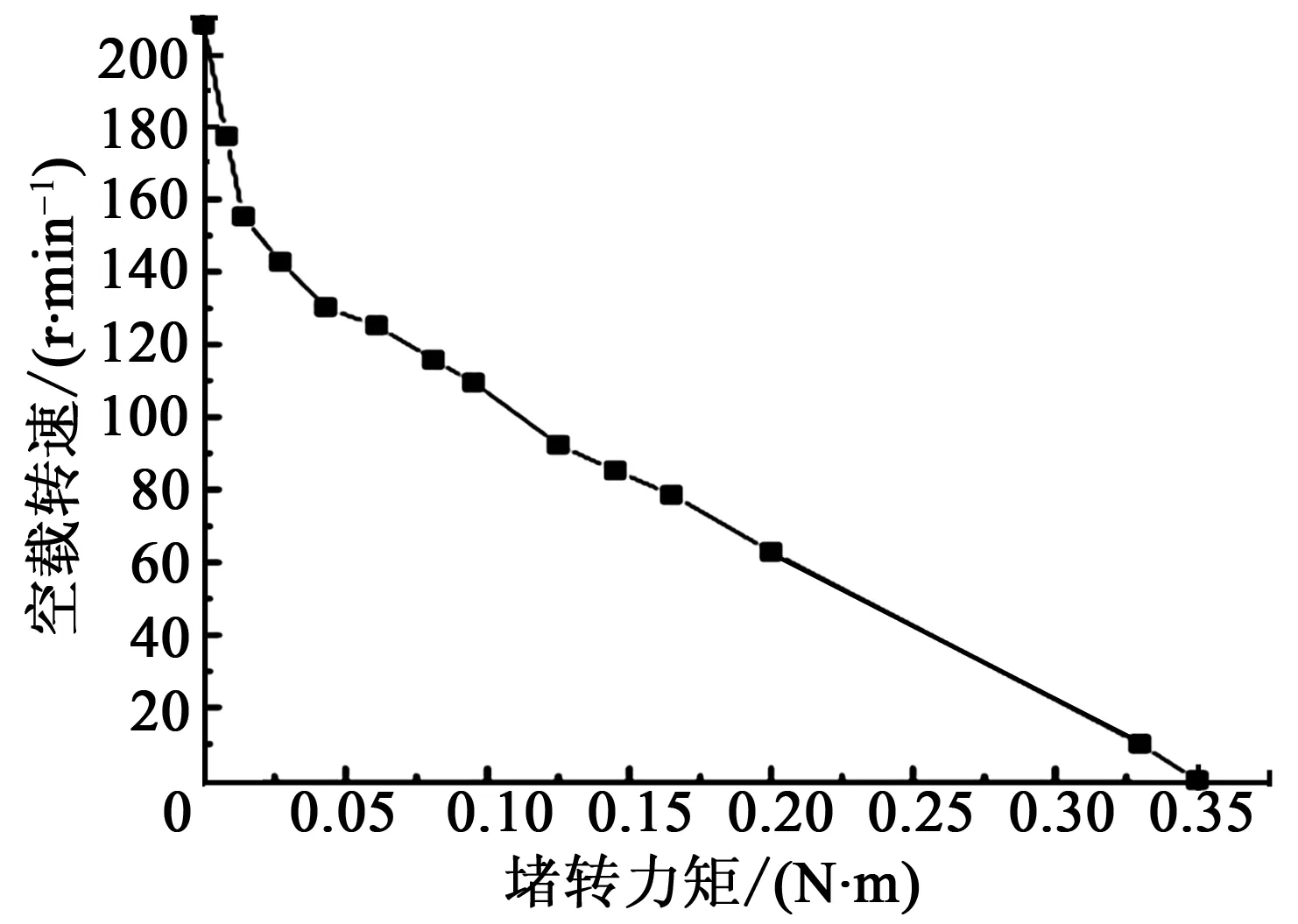
图13 中空型超声电机的负载特性曲线
5 结束语
针对某些飞行器舵机等控制系统,要求超声电机具有中空结构和一定的保持力矩等特定工程,本文设计了一种圆筒型转子的中空型超声电机。分析其工作机理,利用有限元软件Ansys对定子结构进行建模和尺寸优化,确定了最佳尺寸。加工了原理样机,进行了一系列的性能测试。实验表明,该中空电机在激励电压峰-峰值450 V,频率40.2 kHz时,空载转速可达208 r/min,堵转力矩可达0.35 N· m,可满足实际的工程需要。
猜你喜欢
防爆电机(2021年1期)2021-03-29 03:02:46
测控技术(2018年2期)2018-12-09 09:00:52
凿岩机械气动工具(2017年3期)2017-11-22 07:22:04
湖北经济学院学报·人文社科版(2015年8期)2015-12-29 05:53:07
新疆钢铁(2015年1期)2015-11-07 03:11:03
电机与控制应用(2015年10期)2015-03-01 03:50:16
上海电机学院学报(2015年4期)2015-02-28 14:30:00
华东理工大学学报(自然科学版)(2015年5期)2015-02-27 13:49:59
华东理工大学学报(自然科学版)(2015年5期)2015-02-27 13:49:59
电力工程技术(2014年1期)2014-03-20 14:19:06