
北斗/GPS在民航中的完好性分析与评估*
2019-04-12 05:06刘瑞华丁其金
航天控制 2019年1期
刘瑞华 丁其金 翟 显
1.中国民航大学电子信息与自动化学院,天津300300 2.民航航空器适航审定技术重点实验室,天津300300
随着航空业的大力发展,航空安全和完好性已成为全球导航卫星系统(GNSS)最为关键的性能指标[1]。其中,美国的全球定位系统(GPS)是投入运行最早、技术发展时间最长且最完善、用户数量最多的GNSS系统,且GPS还在不断创新和改进[2]。俄罗斯GLONASS 建设历程与GPS类似,几乎与 GPS 同时建成并投入使用,也正在进行现代化改造[2]。欧洲从20世纪90年代开始,先后启动欧洲地球同步导航重叠服务(EGNOS)广域增强系统和 GALILEO 全球系统建设[3],已在2016年底投入使用,向全球提供免费服务。中国 BDS 系统是继GPS和GLONASS之后第3个拥有独立自主卫星导航系统的国家,BDS 工程建设已全面展开,2018 年将向“一带一路”沿线及周边国家用户提供基本服务,2020年将向全球用户提供开放服务。
从技术来看,四大系统都在全面建设提升系统的安全性和完好性。所以说,对于安全性要求很高的民用航空用户和军事用户,提供一套完整可靠的完好性技术有助于提升卫星导航系统的整体性能,因此利用多种方法来分析、评估和优化卫星导航系统完好性是一项非常必要同时又十分迫切的工作[4]。本文针对北斗卫星导航系统的可见星、定位误差以及水平保护限值等完好性相关参数,结合相同时间相同环境下的GPS对应参数,提出了一个完好性评估方法,可为北斗卫星导航系统的监测评价及优化提供一定的参考,提高北斗卫星导航的定位精度和完好性。
1 完好性相关参数
完好性是指当导航系统的误差超过所允许的限值而不能胜任规定的导航工作时,系统及时报警,通知用户终止此信号的功能,完好性是导航系统的重要指标之一[5]。
1.1 可见星个数
可见星数目是指在一定卫星高度截止角下用户接收机接收并识别到的卫星数目,它是卫星导航系统性能评估参数中的一个度量。一般来说,可见星数目越多越好,它的多少直接影响着解算的位置精度。对于完好性测试,可见星的个数应大于5颗。
1.2 精度因子(DOP)
精度因子是导航定位中一个非常重要的概念,被广泛用于衡量卫星几何分布的好坏,一般来讲,DOP值越小,精度越高。以下为完好性评估过程中相关DOP值的计算方法。

(1)
其中,O为观测值;c为光速;(x,y,z)T和Δtr分别为用户坐标和接收机钟差;Δts,Δion,Δtrop,Δρs,Δmp,Δε分别为卫星钟差、电离层误差、对流层误差、星历误差,多路径误差和接收机噪声[6]。这些都是造成定位误差的因素。
线性化处理后,可以得到测距码的伪距线性方程为:
(2)
其中,Δρ为误差修正的测量伪距与接收机天线到卫星的近似几何距离差;H是伪距观测矩阵;(Δx,Δy,Δz)表示接收机天线位置坐标修正值;Δtu为用户接收机的时间误差。
若伪距测量偏差和时钟偏差都服从均值为0的高斯分布,那么可以得到权系数矩阵G:
(3)
则PDOP,HDOP的值分别为:
(4)
(5)
DOP值作为精度因子,从根本意义上表征了卫星导航系统的定位精度。
1.3 定位误差
GNSS的主要应用就是全球导航,包括用户接收机利用原始观测值来定位、测速与授时,定位精度是重要的性能指标之一[7]。
对于导航定位系统来说,定位误差受卫星钟差、电离层误差、对流层误差、星历误差、多路径误差和接收机噪声的影响,由用户等效测距误差(UERE)来代表所有误差。卫星导航系统精度的基本方程为[8]:
UHNE=UERE×HDOP
(6)
UVNE=UERE×VDOP
(7)
其中,UHNE和UVNE分别表示用户的水平定位精度和垂直定位精度。
1.4 保护门限
保护门限(PL):HPL(VPL)为水平(垂直)方向分量,是衡量用户定位误差大小的一个指标,不仅反映了系统星历误差、卫星钟差,还反映了可视卫星的几何条件,将伪距域的误差通过卫星几何条件转化到定位域。保护门限PL以一定的置信概率限定的误差范围来表示,对定位误差具有“包络”作用[9]。
告警限值(AL):HAL(VAL)为HPL(VPL)的极限值[10],HAL(VAL)是由具体的应用环境决定的,ICAO规定在航空应用领域5个不同的飞行阶段对应不同的AL值,如NPA阶段的HAL为556m,CATI的HAL为10m。
在本测试方法中,计算保护门限采用了改进的最小二乘法。作二元假设,无故障假设中,即SSE(残差平方和)的期望值为0时,概率服从自由度为m-4的卡方分布,则:
(8)

(9)
阈值可以由误警率得出:
(10)
其中,Q=1-P(χ2|r)。
当存在故障时,即SSE的期望值不为0,概率服从自由度为m-4的非中心卡方分布,则:
(11)
PMD=P(Q-1(PFA|(m-4))|(m-4),λ)
(12)
(13)
通过式(13)可以求出满足航行阶段完好性监测漏检率要求的最小非中心化参数λmin。除了卫星几何分布的影响,系统完好性还受到测量噪声环境的影响。在理想状态下,考虑到引起精度下降最快的方向,卫星出故障时,故障最难检测,得出定位误差完好性风险比值:
(14)
EIR反映了定位误差ΔPE的平方与残差平方和的线性关系,最大定位偏差值-水平保护门限HPL的计算公式为:
(15)
完好性是否可用由PL和AL比较,针对每个计算的定位解,由方程(15)计算PL,再与相应飞行阶段服务规定的AL相比较,若PL>AL,则触发完好性告警机制[11]。若PL 针对定点北斗完好性测试台,在测试台放置2台型号相同的接收机,分别接收北斗和GPS原始观测数据,把测试站点长期以来统计出的位置信息作为基准,将北斗与GPS数据进行处理后的定位结果与基准数据进行对比分析。 测试采用对接收机存储的原始观测量进行后处理的方式,通过建立误差模型来求解伪距测量误差,进而解算出相应数据段的每一时刻对应的估计位置精度、位置精度因子、水平保护限值及垂直保护级限值等完好性相关参数,由于GPS已经比较完善,因此把得出的北斗完好性结果与GPS完好性结果进行对比分析,最终进行统计。图1是整个完好性测试方法的基本流程。 图1 BDS/GPS完好性测试流程 假定“完好性损失仅由单颗卫星故障造成”以及“接收机在工作期间是无故障的”,在接收机自主完好性(RAIM)技术被用来提供实时监测的前提下,BDS PNT(定位导航授时)服务层完好性的评估方法如下: (16) 其中,CTI是指连续时间间隔(Continuity Time Interval,CTI),国际民航组织(ICAO)中的所需导航性能(RNP)在非精密进近阶段NPA是以小时为单位统计的,所以在这里CTI的取值为1h;MTBFint是指完好性损失平均故障间隔时间(Mean Time Between Failure,MTBF),它被计算为总时间除以危险误导信息(Hazardous Misleading Information,HMI)事件的数目。所以,在之后的完好性评估方法中,任何持续10s以上的下列事件被统计为完好性HMI事件: 1)水平保护限值(HPL)无法计算(大于截止高度角的可见卫星数<5颗); 2)水平保护限值大于水平告警限值,HPL>HAL(556m); 3)水平定位误差>556m; 4)任意1)~3)的组合事件。 最终的完好性结果的统计将应用累积分布函数(Cumulative Distribution Function,CDF),即对连续函数,所有小于等于a的值,其出现概率的和,计算公式如式(2): F(a)=P(x<=a) (17) F(a)为是概率密度函数的积分,是一个增函数,完整地描述一个实数随机变量的概率分布。用累计概率统计方法可以直观地观测到概率统计值为95%,99.99%或者任意想得到的概率对应的数值,使得观测结果更加直观,便于统计。 本文以天津某已知基准点为例,使用2台NovAtel ProPak6型号接收机,分别接收北斗和GPS原始观测数据,按照第2节中的测试流程及评估方法,对可见星,定位误差以及水平保护限值等北斗完好性相关参数进行统计评估,以下是测试评估结果。 固定完好性测试台,观测区间为2017年12月28日—2018年1月4日,时间共计1周(0s~604800s),观测步长为2s,截止高度角为5°,以NPA阶段RNP为应用对象,运行程序得出观测点一周观测时间的北斗导航系统和GPS的可见星数目对比图、可见星数目统计对比图。 图2 BDS/GPS可见卫星数量变化与统计 从图2可以看出,在该测试点:1)不同观测时段,可见星个数相同或不同情况下,卫星分布和用户构成的布局发生变化;2)北斗导航系统的可见星数目大多是处于10~11颗状态,GPS可见星数目大多处于9~10颗状态;3)在这一周内,北斗卫星导航系统和GPS可见星数目都在7颗以上,大于5颗的比例高达100%,满足执行上述完好性测试方法对可见星个数大于5颗的要求。 图3为观测期间,北斗HDOP、VDOP和GPS的HDOP、VDOP的统计结果。从图3可以看出,北斗的HDOP和VDOP均略高于GPS的HDOP和VDOP,且北斗的HDOP和VDOP值均波动较大。 图3 BDS/GPS DOP对比 图4分析了北斗导航系统和GPS的水平/垂直定位误差结果,图5~6分别对北斗导航系统和GPS的水平/垂直定位误差结果进行了统计。 图4 BDS/GPS水平、垂直定位误差 图5 BDS/GPS水平定位误差统计 图6 BDS/GPS垂直定位误差统计 由图4可以看出北斗/GPS水平定位误差之间相差2~4m。图5对北斗导航系统和GPS的水平定位误差进行累计概率和垂直误差分布的样本数量进行统计,图中所标注的0.95对应的5.74m和7.21m分别表示GPS和北斗系统水平定位误差的95%的统计值。图6对北斗导航系统和GPS的垂直定位误差进行累计概率和垂直误差分布的样本数量进行统计。可以看出GPS垂直定位误差的95%统计值为5.65m,北斗垂直定位误差的95%统计值为6.60m。通过统计结果来看,GPS的定位精度略高于北斗的定位精度,但在此观测期间,两系统的定位误差都在阈值范围内,满足上述北斗完好性测试要求。 图7和8为水平保护门限数据处理结果。 图7 BDS/GPS水平保护门限对比 图8 BDS/GPS水平保护门限统计 由图7可以看出,在观测区间内北斗和GPS的HPL值始终小于HAL=556m,由图8对北斗和GPS水平保护门限的统计可以看出,GPS的水平保护门限99%的统计值为22.746,北斗的水平保护门限99%的统计值为36.834m。通过完好性结果来看,北斗的HPL统计值略大于GPS的HPL统计值,但是北斗导航系统依然能够较好地满足完好性要求。 根据北斗导航系统管理办公室已公布的北斗区域卫星导航系统的星座状态,服务性能和ICAO附件10对航空飞行不同阶段的GNSS性能需求,对北斗卫星导航系统完好性性能的评估方法进行了研究,并以天津某已知基准点为例,在指定观测区间,通过本文提出的完好性评估方法,对北斗系统的完好性及相关参数进行测试实验,对测试结果进行了分析与统计,并得出以下结论: 1)当截止高度设为5°时,北斗卫星导航系统和GPS可见星数目均在5颗以上,满足本文完好性测试方法要求; 2)北斗卫星和用户的几何分布要稍差于GPS卫星和用户的几何分布,也是导致定位精度不同的原因之一; 3)GPS的定位精度略高于北斗的定位精度,但定位误差都在要求阈值; 4)北斗的HPL统计值大于GPS的HPL统计值,但远小于HAL,满足完好性要求。 从结论可以得出:在所测试的观测区间内,北斗系统定位误差,可见星数目和HPL值等完好性结果虽和GPS系统略有差距,但均满足完好性需求,能够为民航非精密进近阶段提供较优的导航服务。2 完好性测试方法
2.1 完好性测试流程

2.2 完好性评估方法
2.3 完好性结果统计方法
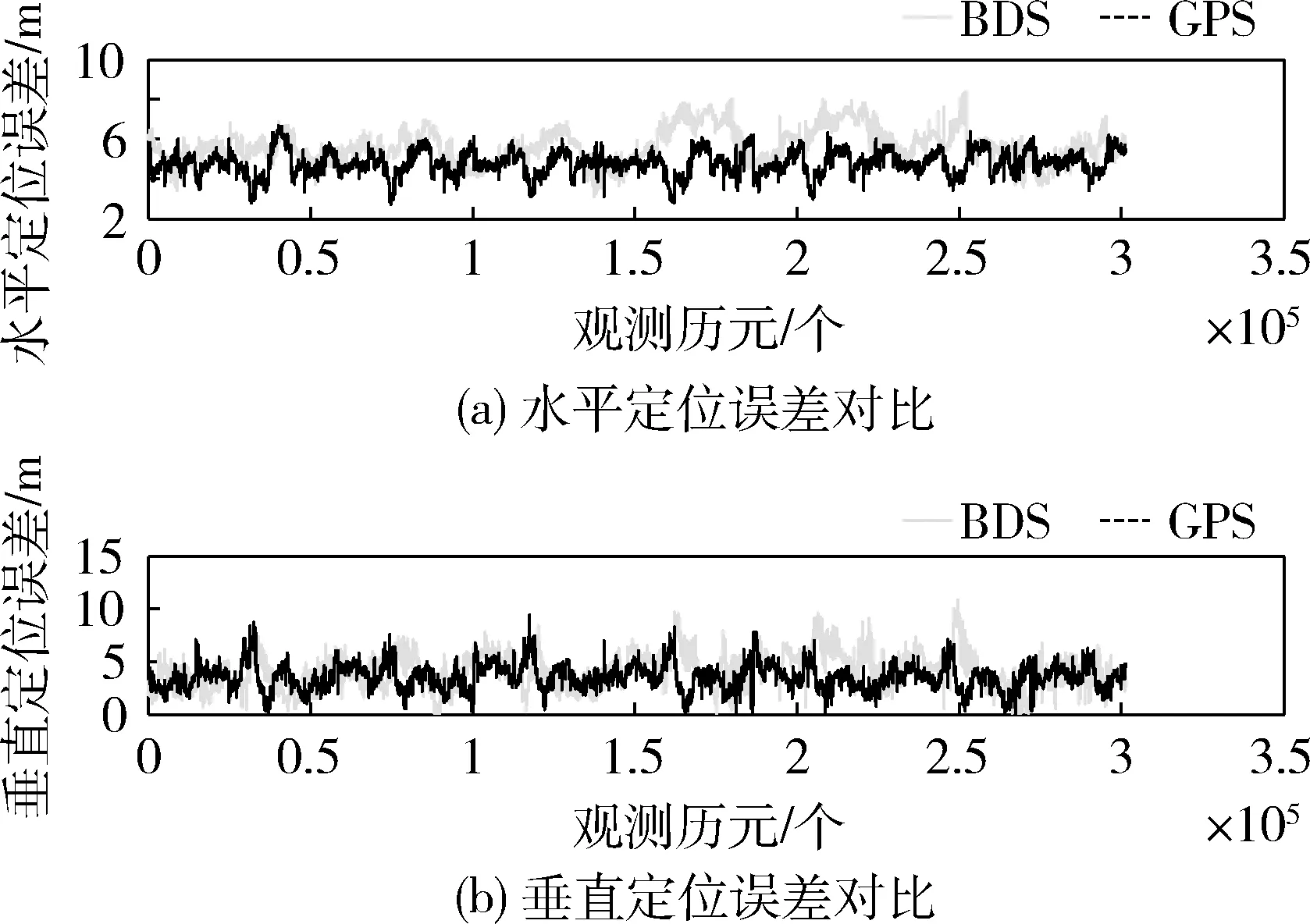
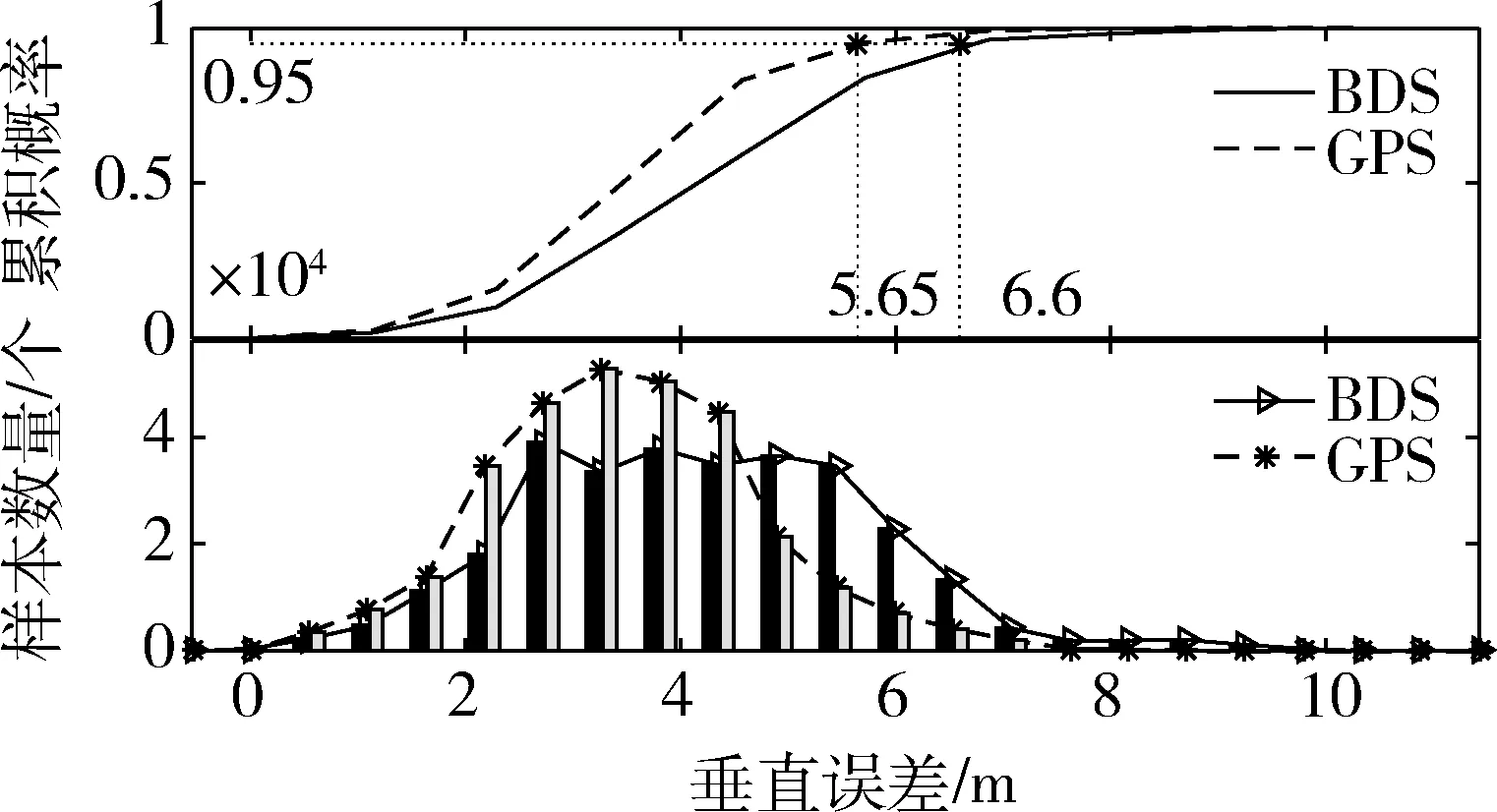
3 测试结果分析
3.1 可见星统计

3.2 DOP值及用户定位误差分析


3.3 保护门限分析


4 结论
猜你喜欢
军事文摘(2023年4期)2023-04-05
汽车实用技术(2022年4期)2022-03-07
中国西部(2021年4期)2021-11-04
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
中国惯性技术学报(2017年1期)2017-06-09
