
基于固体运载器飞试数据的风场辨识方法研究
2019-04-12 05:06叶振信朱广生
航天控制 2019年1期
钟 震 李 芳 胡 钰 高 波 叶振信 朱广生
1.北京宇航系统工程研究所,北京100076 2.中国运载火箭技术研究院,北京100076
风是运载飞行器穿过大气层过程中必然要经历的一个环境因素,在运载飞行器设计中占有重要的作用[1]。由于风的变化与地球自转、地形特性以及到达地球大气和地面的有效太阳能有关,因此风的变化特性往往随地域、高度和时间不同而不同。有效掌握风在不同高度的风速和风向,以便提供可以利用的真实飞行风场环境,对运载飞行器的姿态控制系统设计、制导精度分析和载荷分析等都非常必要[2-3]。然而,受各种技术因素的限制,当前的运载飞行器本身并没有直接的风场测量装置,都是在运载飞行器飞行试验之前,通过放高空气球、探空火箭和无人机等方式获得风场数据。这些测量手段可为飞行试验提供参考,但也有不足之处,如高空气球受气压环境的限制往往较难测量20km以上高度的风场数据,另外,由于风场本身具有动态性,在不同时刻、不同经纬度和不同高度下的风向和风速都存在差异,因此即使通过外在测量手段获知风场数据也并不能直接反映飞行器飞行过程中所经历的真实风场环境,最能反映飞行器飞行过程中真实风场环境的有效手段是通过飞行试验测量数据进行风场辨识。
飞行器飞试数据的风场辨识即是通过飞行试验数据获得飞行器在各个不同飞行高度下的风速和风向。在传统运载飞行器设计过程中,一般考虑风沿水平方向运动并通过统计手段将多次风测量数据统计处理成综合矢量风剖面,综合矢量风剖面往往只给出不同高度下的风速变化,设计过程中考虑水平360°全风向以保证各种条件下的飞行器安全设计,这种全风向包络设计往往使得设计方案较为保守。通过辨识出的风速和风向,不但可以检验和比较飞行试验之前通过高空气球、探空火箭等方式获得的风场数据,还可以有效验证运载飞行器设计过程中采用的综合矢量风场,降低设计条件,从而可以进一步优化和提高运载飞行器的综合性能。
当前风场辨识已有很多方法,如文献[4]基于位置矢量合成关系给出了航空炸弹飞行中的风场辨识;文献[5]基于位置信息给出了小型固定翼无人机多步长风场估计方法,文献[6]针对气象无人机飞行迎角和航迹倾斜角给出了测风估计方法,文献[7]基于无人机测风特点利用粒子滤波算法给出了一种风场估计方法;文献[8]利用抗差自适应滤波算法对风场进行了估计用于提高组合导航精度,文献[9]针对有火箭推进的飞行器研究了利用加速度计信息以离散反卷积对时变的纵风干扰辨识方法。这些方法都获得了较好的辨识结果,但多数成果或者适用于无人机、炸弹等具体的研究对象,或者未考虑飞行器飞行过程中的姿态变化情况。经查询,现有文献还并未有专门针对固体运载飞行器在有主发动机工作段下的风场辨识结果。主发动机工作段风场辨识的一个难点是,运载器主发动机推力与气动力存在严重的耦合导致较难从飞行数据中剥离出风场数据,另外如惯组测量误差、伺服控制线位移与实际喷管摆角的差异、实际大气密度与理论值之间的差异的影响等因素都会造成风场辨识的误差,因此风场辨识一直是固体运载飞行器设计中的难点。
为了解决上述问题,本文通过综合分析各个飞试测量数据,并综合考虑各项不确定和误差因素,提出了基于固体运载飞行器飞行试验数据的风场辨识方法,可同时辨识固体运载飞行器主动段飞行过程中不同时刻和高度下的风速和风向,对运载器总体设计中面临的风场环境分析与验证具有重要应用意义。
1 辨识方法
1.1 惯组数据处理


(1)
(2)

1.2 伺服摆角
受喷管接头、后封头的变形等因素影响,固体运载飞行器主发动机喷管伺服角位移测量数据与真实的喷管瞬时作用摆角存在差异,这些差异即为附加摆角,一般与发动机内压存在对应关系。在辨识过程中使用的喷管摆角公式为

(3)

1.3 发动机推力
在固体运载飞行器主发动机推力主要受外界环境大气压强和工作内压之间的影响。长期的工程实践表明,固体发动机工作平稳段采用实时压差的附加推力修正后,可以很好地得到飞行器飞行过程中的固体发动机实时推力。发动机推力计算公式如下:
FN=f(Pc)+Ae(Pa0-Pa)
(4)
其中,FN为固体发动机当地推力值;f(Pc)为固体发动机在设计环境下的推力与发动机内压的函数关系式;Ae为主发动机喷管出口面积;Pa0为主发动机设计的环境大气压强;Pa为主发动机工作时的环境大气压强。
利用发动机推力、喷管俯仰方向摆角和偏航方向摆角之间的几何关系,可计算得到发动机推力在俯仰、偏航和滚转3个通道上的分量值如下
(5)
其中,FNx1,FNy1和FNz1为固体主发动机推力在弹体坐标系下的3个分量;FN为固体发动机当地推力值。
1.4 其他数据
辨识过程需要获得飞行器飞行过程中的质量变化和质心变化,这些都可以依据发动机地面试车、飞试前质量称重和飞行中发动机实时内压和流量等获得。飞行器飞行中的大气密度等环境参数,也可以通过飞试前的气象测量得到。因此,在辨识处理中,认为飞行器飞行过程中的质量、转动惯量、质心变化及飞行大气密度等数据是可获得且已知的。另外,飞行器飞行过程中的弹性振动也会影响到辨识结果,但考虑到固体飞行器弹性振动频率较高且姿控网络已有效抑制弹体弹性振动,因此在本文的辨识过程中未考虑弹性的影响。
1.5 求取气动数据
设飞行器在主动段飞行过程中满足力平衡方程和力矩平衡方程,根据力和力矩平衡方程可得到气动参数与惯组数据、发动机推力之间的等式关系如下:
(6)
1.6 风向和风速寻优辨识公式
实际风攻角和风侧滑角需要在飞行器飞行过程中的实际气流攻角基础上求得。由于高空风场的作用,飞行器飞行过程中的实际气流攻角是无法直接通过惯组测量数据得到的。风洞试验数据可以较为真实地反映飞行器飞行过程中的气动变化情况。不失一般性,设风洞试验数据给出了不同飞行器总攻角Alfa和总滚转角Gama下的气动参数。利用公式(6)得到的气动参数,采用加权最小二乘法则可求出相应的总攻角Alfa和总滚转角Gama。
(7)

利用总攻角Alfa和滚转角Gama与飞行攻角/侧滑角之间的关系,可以得到在风场作用下,飞行器飞行过程中的实际攻角和实际侧滑角
αs=arctan(tan(Alfa)cos(Gama))
βs=arcsin(sin(Alfa)sin(Gama))
(8)
根据惯组测量处理后的攻角αg、侧滑角βg、滚转角γg及式(8)即可得到风速产生的风攻角αWK和风侧滑角βWK。再利用式(9)和(10)可以得到不同高度下的风速和风向
(9)
(10)
其中,WK和AW为风速和风向;A0为固体运载飞行器射向;V为飞行速度;θ为轨迹倾角。
2 应用结果
将上述风场辨识方法应用到某固体运载飞行器飞行试验测量数据中,验证本文方法的有效性。飞行测量数据覆盖海拔高度3km到32km,伺服角位移传感器和惯组采样周期为10ms,发动机内压采样周期为5ms。辨识中同时考虑输入数据的误差和不确定性因素,主要包括惯组测量数据的噪声、伺服摆角误差、飞行器质量偏差、转动惯量偏差和气动偏差等,辨识结果给出了未考虑误差和不确定因素的标称值和考虑误差和不确定性之后的上下包络值。

图1 不同高度下的辨识风速结果
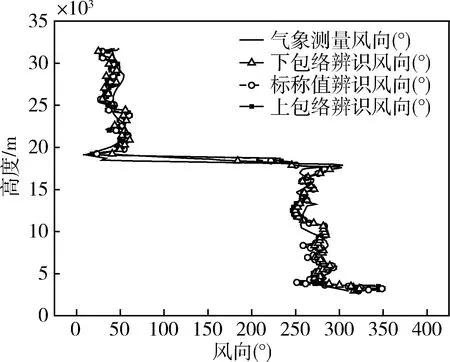
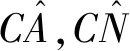
图2 不同高度的辨识风向结果
图1和2分别给出了辨识出的不同高度下的风速WK和风向AW的标称值及上下包络值,并与飞试前通过释放探空气球的气象测量结果进行了比较,后者虽然并不能完全真实反映飞行器飞行过程中的风场,但其变化趋势也能表征本文辨识方法的有效性,其中气象测量结果的高度步长为200m,而辨识得到的数据依据输入数据的采样周期和飞行器速度变化,辨识高度步长范围为20m~100m。图中可以看出,风速从3km高度到12km高度逐渐增大,最大值在45m/s左右,随后从12km到18km风速逐渐减小到几米,之后逐渐增大;风向在18km以下为250°-300°左右,18km以上大气层由对流层转为平流层,风向转为40°~50°左右。辨识出的风速风向与气象测量数据趋势基本一致。
图3和4给出了辨识风速风向标称值与气象测量风速风向在不同高度下的差异情况,图5和6给出了辨识风速风向与气象测量风速风向偏差分布统计,表1给出了差异统计值,通过分析结果可知,辨识风速标称值与气象测量风速差异均值约为2.1m/s,标准差约为5.7m/s,差异中值为1.6m/s,均值95%置信区间绝对值小于3.25m/s, 相对误差百分比约为11.39%;辨识风向标称值与气象测量风向差异均值约为-6.2°,标准差为29.8°,差异中值为-6.64°,均值95%置信区间绝对值小于9.28°,相对误差百分比约为6.50%。

图3 不同高度下的辨识风速与气象测量风速差异
图4 不同高度下的辨识风向与气象测量风向差异

图5 辨识风速与气象测量风速偏差分布统计

图6 辨识风向与气象测量风向偏差分布统计

表1 辨识风速和风向与气动测量结果比较
图7和8给出了考虑各项误差和不确定因素之后的上下包络范围大小,风速包络范围最大绝对值为8m/s, 经统计计算可知,风速偏差包络均值为2.9m/s,标准差2.4m/s,80%以上包络值在5m/s范围内;风向包络范围最大绝对值为120°,出现在18km由大气对流层转为平流层时刻,经统计计算可知,风向偏差包络均值7.1°,标准差12.8°,95%以上包络值在20°范围内。可以看出,在考虑各项误差和不确定因素后,辨识得到的风速风向具有与标称值趋势一致且偏差较小的包络值。

图7 不同高度下的辨识风速包络范围

图8 不同高度下的辨识风向包络范围
3 结束语
针对固体运载飞行器可获取的测量数据,提出了辨识数据处理方法及风场辨识公式。从应用结果来看,辨识得到的风场可以较好地与气象测量风场数据吻合,并具有较小的偏差包络范围,可为固体运载飞行器飞行风场辨识和飞行环境分析提供借鉴。
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
成都信息工程大学学报(2021年5期)2021-12-30
电子制作(2018年2期)2018-04-18
能源(2017年8期)2017-10-18
通信电源技术(2016年1期)2016-04-16
知识经济·中国直销(2016年3期)2016-02-27
小朋友·快乐手工(2015年5期)2015-06-06
风能(2015年8期)2015-02-27
风能(2015年4期)2015-02-27
化学工业与工程(2012年6期)2012-02-10
