分布式驱动电动汽车复合制动系统转矩分配控制策略仿真∗
2019-04-11 05:57:14杜荣华米思雨
汽车工程 2019年3期
杜荣华,米思雨,胡 林,孟 灿
(1.长沙理工大学智能交通与车路协同技术研究所,长沙 410114; 2.长沙理工大学汽车与机械工程学院,长沙 410114;3.长沙理工大学,工程车辆安全性设计与可靠性技术湖南省重点实验室,长沙 410114)
前言
随着电动汽车的发展,其制动稳定性控制得到了国内外学者的广泛研究,然而这些研究大多针对纯液压制动的前驱电动汽车,对带复合制动的分布式驱动电动汽车的制动稳定性控制研究较少,分布式驱动电动汽车为动力学控制引入了新的实现形式,其主要结构特征是将驱动电机嵌入车轮中,具有传动链短、传动效率高等特点,与传统内燃机车辆相比,省去了原有的机械结构,各个车轮之间均可独立控制,各车轮转矩均可按照任意比例进行分配[1-3]。文献[4]中通过对电动汽车制动能量回馈约束条件的分析,提出了一种基于制动能量回收最大化的电液复合制动力协调式控制策略。该策略既能保证车辆的稳定又能回收制动能量,可在一定程度上增加续航里程,但该策略只针对前轴具有再生制动、后轴仅有液压制动的车辆,所以制动回收的能量有限。文献[5]中以整体效率最高为目标,提出了最大能量回收制动控制策略,并采用序列二次规划法对充电功率进行优化,获得ISG电机优化转矩。另外,进行了多种工况下的仿真与实车实验,验证了控制策略的有效性。而控制策略的前后轴制动力分配采用的是理想制动力分配曲线,该曲线会随着汽车载荷分配的不同而变化,且变化的幅度很大,所以前后轴制动力分配的准确度大大降低。文献[6]中对分布式驱动电动汽车设计了分层控制策略,进而设计了分层控制的电机与液压制动复合分配控制算法,其优点在于考虑了轮胎横纵向力耦合、执行器、路面约束等因素,但目前控制分配领域缺乏对轮胎横纵向力耦合的量化和不同执行器动态特性的考虑。文献[7]中考虑电机再生制动和电池充电功率,利用混合自动机模型,提出了电机再生制动力和前后轮液压制动力协调控制的再生制动控制策略。文献[8]中针对在前轮驱动的混合动力电动汽车中,过度的再生制动提供的最大制动能量会导致转向不足问题,重新定义了带约束的成本函数,包括用于提高制动能量回收的再生制动转矩和车辆横向稳定性的制动转矩的最佳分配,提出了前轮驱动混合动力电动汽车的协同再生制动控制方案。文献[9]中为减少稳定性控制中的车速和轮胎力的纵向利用率的降低程度,通过二次规划的方法分配各个车轮所需的纵向力,并优先使用基于轮毂电机输出制动力,再使用液压制动力的分配方式来分配车辆制动时所需的横摆力矩。通过滑模控制器计算出维持车辆稳定所需的横摆力矩,并通过Matlab/Simulink仿真分析验证了该策略,提高了车辆的稳定性。文献[10]中提出了一种基于模糊控制的电动汽车复合制动力分配策略,以理想制动力分配I曲线作为分配目标,以此来计算和分配各个车轮的需求制动力,但该控制策略未考虑在特殊工况下车辆的附加横摆力矩对车辆稳定性的影响和所研究的车辆为前驱电动汽车。文献[11]中分析了机电复合制动原理,提出了一种基于滑模控制纯电动汽车复合制动控制策略,其中将前后轴的分配关系规划在I曲线、ECE法规线和F线所围成的区域内,在ADVISOR2002中进行仿真验证,能有效地提高车辆在制动过程中的能量回收率,但对车辆在制动过程中的稳定性分析考虑较少,且研究对象为前驱电动汽车。文献[12]中为提高轮毂电机驱动电动汽车行驶稳定性,设计了基于直接横摆力矩控制的车辆稳定性控制系统;针对滑模控制存在固有抖振的问题,建立了基于模糊滑模控制理论的稳定性控制器;针对车辆质心侧偏角难以测量,建立了结构简单、计算快速的非线性滑模观测器;最后进行了仿真分析,表明该控制器能很好改善车辆的操纵稳定性,且控制输出更加平顺,但缺点在于未考虑路面和效率的影响因素。
上述研究过程大多仅单独针对能量回收最大化或车辆制动稳定性的研究,且只针对前驱电动汽车,对分布式驱动电动汽车而言,同时考虑车辆制动稳定性和回收能量最大化的研究较少,因此本文中针对轮毂电机驱动的分布式驱动电动汽车,为兼顾车辆的制动稳定性和制动能量回收,本文中设计了分层的控制结构。其中,上层控制器采用滑模控制策略进行了广义纵向制动力和附加横摆力矩的求解,下层控制器采用加权最小二乘法进行了四轮液压制动力和电机制动力的分配。由于电机制动和液压制动具有不同的动态特性,当车辆制动时须协调分配电机制动和液压制动的转矩,以达到维持车辆稳定和回收制动能量的目的。结果表明,本文中所采用的控制策略满足要求,既能在对开路面工况下保证车辆制动稳定性,又能在制动过程中回收大量能量,延长了汽车的续航里程。
1 复合制动控制结构设计
目前,大多数的复合控制策略可分为并联式控制策略和串联式控制策略两种,如图1所示。
并联式复合制动控制结构优势在于无须对原有的液压制动系统进行大的改动,成本低,且操作方便,但其主要是将电机制动转矩和液压制动转矩直接叠加,两者之间缺乏一定的转矩协调控制。而串联式复合制动控制,行驶过程稳定性高,回收能力强,但其结构复杂,且需要高智能化的集成控制器。因此针对两种控制策略的优缺点,本文中提出了复合制动控制策略,它综合了两者的优缺点,不仅能实现车辆对所需制动力的分配和考虑附加横摆力矩对车辆制动稳定性影响,并且优先电机制动,以期最大限度地回收制动能量。
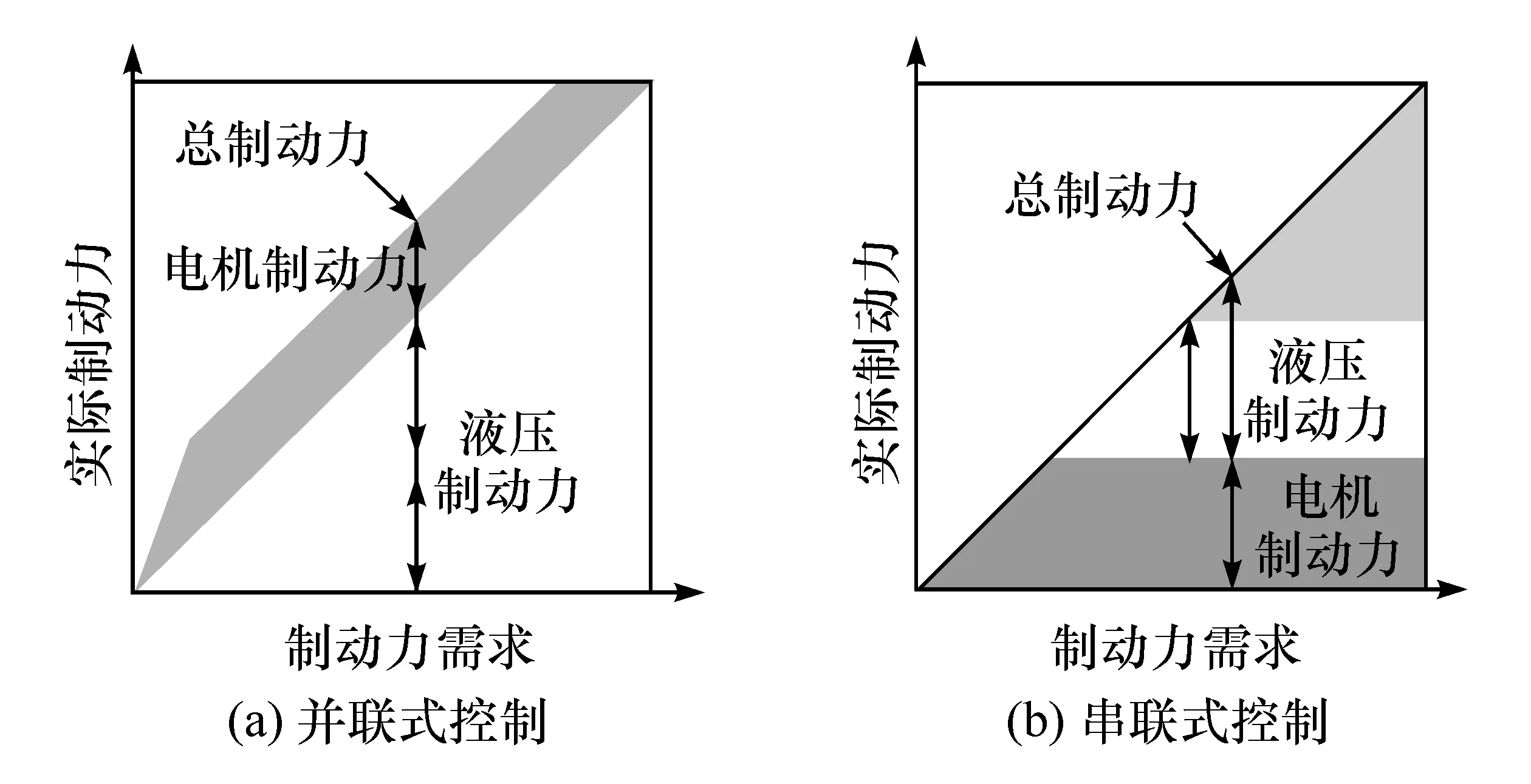
图1 并联式控制与串联式控制对比
因此,具体的控制思路如下:为实现制动时的稳定性控制,上层控制器不仅要计算出满足驾驶员制动需求的轮胎纵向合力,还要计算出维持车辆稳定状态的附加横摆力矩;下层控制器则在上层控制器计算出的广义合力基础上,完成四轮液压制动转矩和电机制动转矩的统一分配,以达到能量回收的最大化。本文中的复合制动控制结构如图2所示。
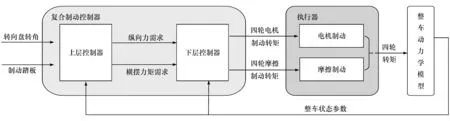
图2 复合制动控制结构图
2 上层控制器
如上所述,复合制动控制的上层控制器主要用于计算两个广义合力。其中,驾驶员纵向力需求可根据制动踏板的行程得出,而纵向力产生的附加横摆力矩是由车辆当前状态和理想状态的偏差通过一定算法计算得到。本文中的车辆理想状态由线性2自由度车辆模型给出,附加横摆力矩的计算采用滑模控制,使车辆的实际横摆角速度和质心侧偏角达到稳态响应下的期望值,保证车辆制动时稳定[13]。
2.1 线性2自由度车辆模型
横摆角速度和质心侧偏角是表征车辆动力学稳定性的两个重要状态变量。为保证车辆制动时的稳定性,希望车辆的实际横摆角速度和质心侧偏角达到期望状态。横摆角速度和质心侧偏角的期望值可根据线性2自由度车辆模型导出,图3为线性2自由度车辆模型示意图。
运动微分方程为
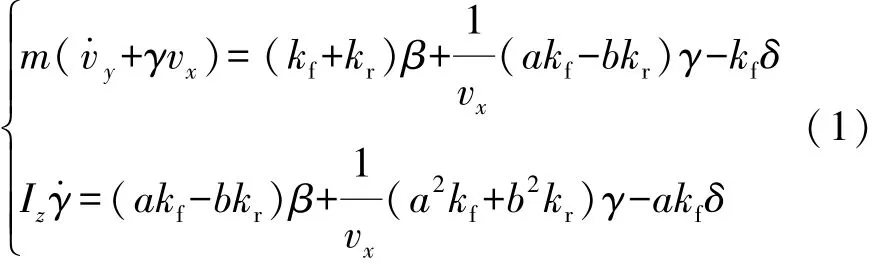
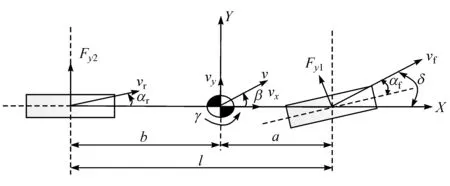
图3 线性2自由度车辆模型示意图
式中:δ为前轮转角;β为车辆质心侧偏角;γ为车辆横摆角速度;kf,kr分别为前后轴侧偏刚度,均为负值;a,b分别为质心到前后轴的距离;vx为车辆纵向速度;vy为车辆侧向速度;Iz为整车转动惯量;m为整车质量。
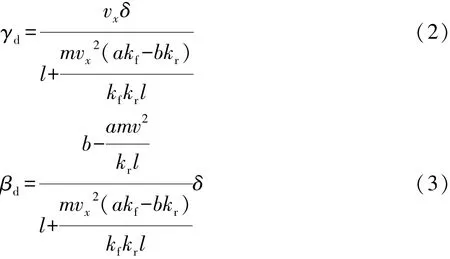
式中:v为车速;l为轴距。
2.2 基于车辆稳定性控制的滑模控制器设计
滑模控制是一种变结构的非线性控制,具有响应迅速、对扰动不敏感和物理实现简单等优点,成为车辆非线性动力学控制的主要方法[14]。滑模控制的关键在于滑模面和趋近率的选取。
在本文中,为实现横摆角速度和质心侧偏角的同时跟踪[15],定义滑模面为

式中ξ为权值系数,该值的选取参照文献[14]中提出的经验公式:
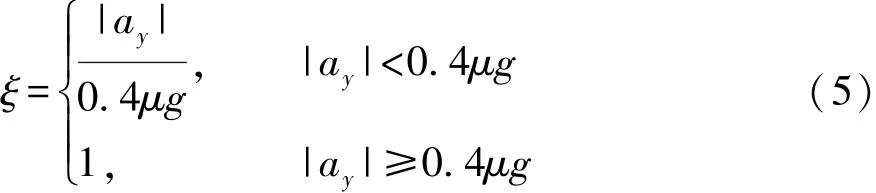
常见的趋近率包括等速趋近率、指数趋近率和幂次趋近率等。本文中结合等速趋近率和指数趋近率的优点,选取如下的趋近率:

其中,第1项为等速趋近率项,第2项为指数趋近率项。
根据上述滑模面和趋近率,可推导出由滑模控制得到的纵向力产生的附加横摆力矩的计算公式:

式中 Fyfl,Fyfr,Fyrl,Fyrr为四轮侧向力。
3 下层控制器
复合制动的下层控制器主要解决四轮电机制动和四轮液压制动转矩的分配问题,而控制分配是解决转矩分配的常用方法。
3.1 控制分配问题
控制分配解决的是过驱动系统的广义合力分配问题。广义合力又称虚拟控制量,是人们对系统最直接关心的控制量,一般是各执行器共同作用产生的合力,只能通过控制各执行器间接得到。所谓过驱动系统是指含有冗余执行机构的系统,该系统的执行器数量大于广义合力的数量,这种冗余结构提高了系统的可靠性和有效性,但同时也增加了系统的控制难度。控制分配就是解决这类问题的方法。其中基于优化的控制分配应用最广,它一般通过求解一个控制目标的优化问题,建立从广义合力到各执行器控制指令的映射[13]。
设广义合力v∈Rn,控制分配通过一定的分配法则将广义合力分配为各执行器指令ucmd∈Rm(m>n)。执行器根据控制指令ucmd产生实际响应u。如果执行器的实际响应u能实时跟随控制指令ucmd,则广义合力v与执行器响应u的关系可表示为v=g(u),g:Rn→Rm即为广义合力到执行器响应的映射。若系统中的v与u是线性关系,则v与u可通过效率矩阵B表示为v=Bu,该关系式即为分配法则。
在分布式驱动电动汽车的复合制动系统中,广义合力v包含轮胎纵向合力Fx和轮胎纵向力产生的附加横摆力矩ΔM(n=2),执行器包含四轮电机制动和四轮液压制动(m=8)。
在车辆高速行驶时,前轮转角δ较小,因此可忽略其对纵向力和附加横摆力矩的影响。根据车辆运动学方程可得
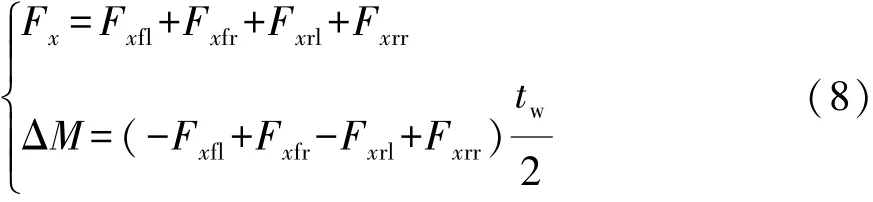
式中:Fxfl,Fxfr,Fxrl,Fxrr为四轮纵向力;tw为轮距。
忽略轮胎的动态特性,可得各轮胎纵向力与电机制动转矩和液压制动转矩间的关系为
式中:Tmfl,Tmfr,Tmrl,Tmrr为四轮电机制动转矩;Thfl,Thfr,Thrl,Thrr为四轮液压制动转矩;r为轮胎滚动半径。
令 u=[Tmfl,Tmfr,Tmrl,Tmrr,Thfl,Thfr,Thrl,Thrr]T,v=[Fx,ΔM]T,根据分配法则可得效率矩阵B:
3.2 加权最小二乘控制分配
加权最小二乘控制分配具有运算速度快、分配精度高等良好的综合性能。加权最小二乘控制分配的目标函数[16]可写为
式中:Ω为权值;Wv为广义合力权重矩阵,决定了各广义合力间的权值;Wu为执行器权重矩阵,决定了各执行器间分配的权值;vd为广义合力;ud为执行器期望达到的控制量。
加权最小二乘控制分配的目标函数还可简化为如下形式:
3.3 基于加权最小二乘控制分配的控制器设计
在复合制动控制中,为保证制动时的稳定性,上层控制器已给出了目标广义力。下层控制器在此基础上首先满足广义力的分配要求,同时为使能量消耗最小,应优先考虑使用电机制动回收制动能量,在电机制动转矩达到或接近饱和时才使用液压制动。
为了实现电机优先制动的分配效果,本文中通过设置执行器的权值矩阵Wu来实现。参照文献[14],选用的权值如下:
控制分配须在执行器的约束范围内完成,执行器的约束通常包括各执行器能力的约束(式(14)和式(15))和路面条件的约束(式(16))。

式中:Tmi为各轮电机制动转矩;Tmi_min为当前转速下电机的最大制动转矩,其值为负值;Thi为各轮液压制动转矩;Thi_min为最大液压制动转矩,其值为负值;Troad_i为考虑各轮载荷及路面条件约束的转矩,Troad_i=μFzir,μ 为路面附着系数,Fzi为各轮垂向载荷。
3.4 有效集算法
加权最小二乘控制分配问题实质上是带约束的二次规划问题,常见解法有有效集法、内点法和固定点法等。与内点法和固定点法相比,有效集法对于解决执行器数目较少(m<15)的控制分配问题求解效率更高,分配结果也足够精确[15]。因此本文中采用有效集算法求解。
有效集算法的主要思想是在每一次迭代中将部分不等约束视为等式约束,并忽略其它的不等约束来求解一个等式约束二次规划子问题。设在某一优化问题中有一组不等式约束条件 g1(x)≥0,…,gk(x)≥0和等式约束条件 c1(x)=0,…,cl(x)=0。由这些约束条件构成的集合称为可行域,在可行域上的解称为可行解。若在可行域内的某点xp,使得某不等式约束 gi(x)≥0的等式部分成立,即gi(xp)=0,则称该约束是xp点处的有效约束。在第k次迭代点xk处所有有效约束的集合称为工作集,记作Wk。在最优解处的工作集称为有效集。
有效集算法一般用来解决如下形式的最小二乘问题:
有效集算法的主要迭代步骤如下。
步骤1:在可行域内选择一初始点u0,并得到相应的工作集W0。
步骤2:将工作集W0中的约束视为等式约束,同时忽略其它不等式约束,这样就将优化问题转化为等式约束问题。每一次迭代开始首先解决一个等式约束优化问题,得到优化扰动量p,进而得到本次迭代的解uk+p。若本次迭代的解不在可行域内,则以一定的最大步长系数α改变步长,由

得到下一次迭代的uk+1。通常最大步长系数α的选取方法为

这样选取最大步长系数α可使uk+1在可行域内,同时在uk+1点处也增加了新的有效约束,将其放入原有工作集中,得到下一次迭代的工作集Wk+1,然后开始下一次迭代。
若求得的解在可行域内,则须判断拉格朗日乘子λ的符号。拉格朗日乘子λ可由下式计算:

式中:λ为向量,包含所有等式约束的拉格朗日乘子;C0的行数为工作集中有效约束的个数。若所有的 λ≥0,则说明找到最优解 uk+1=uk+p,迭代结束。若λ中存在含有负元素,则从工作集中去掉绝对值最大的负拉格朗日乘子所对应的有效约束,得到下一次迭代的工作集 Wk+1,且令 uk+1= uk+p,然后开始下一次的迭代。
4 仿真与分析
在Simulink中建立7自由度整车模型,其中包括Dugoff轮胎模型、电机模型、液压制动模型、电池模型和控制器模型。为验证该复合制动控制策略的控制效果,进行了对开路面工况下的仿真。仿真车辆的主要参数如表1所示。表中:Iw为车轮的转动惯量;hg为车辆质心高度;df和dr为前后轮轮距。
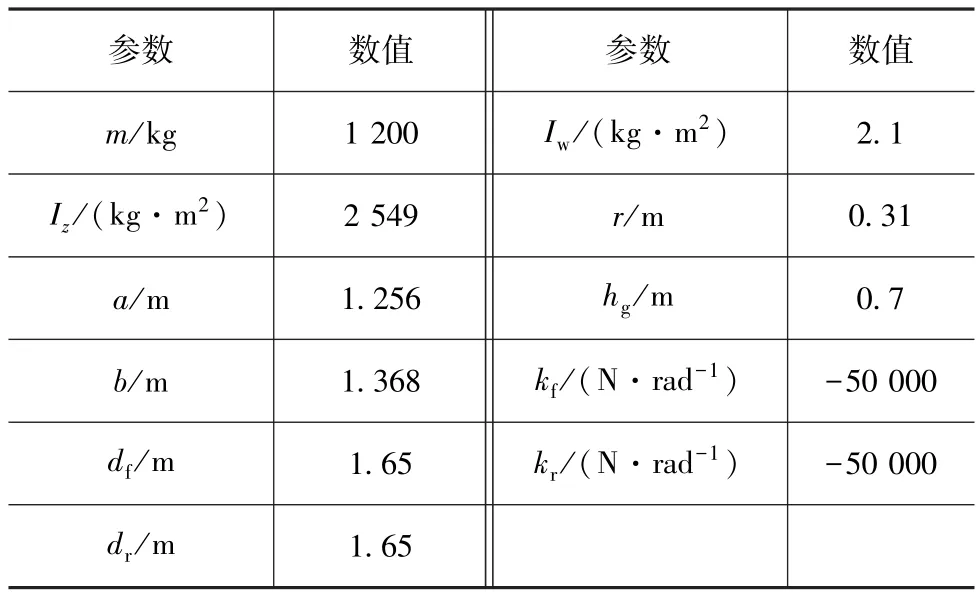
表1 车辆模型主要参数
为验证对开路面下该复合制动控制策略的控制效果,将左侧车轮所在路面的附着系数设置为0.8,右侧车轮所在路面的附着系数设置为0.2。车辆制动时的初始车速为72km/h,制动强度固定为常用制动强度0.2,电池的初始SOC值为60%。仿真结果如图4~图9所示。
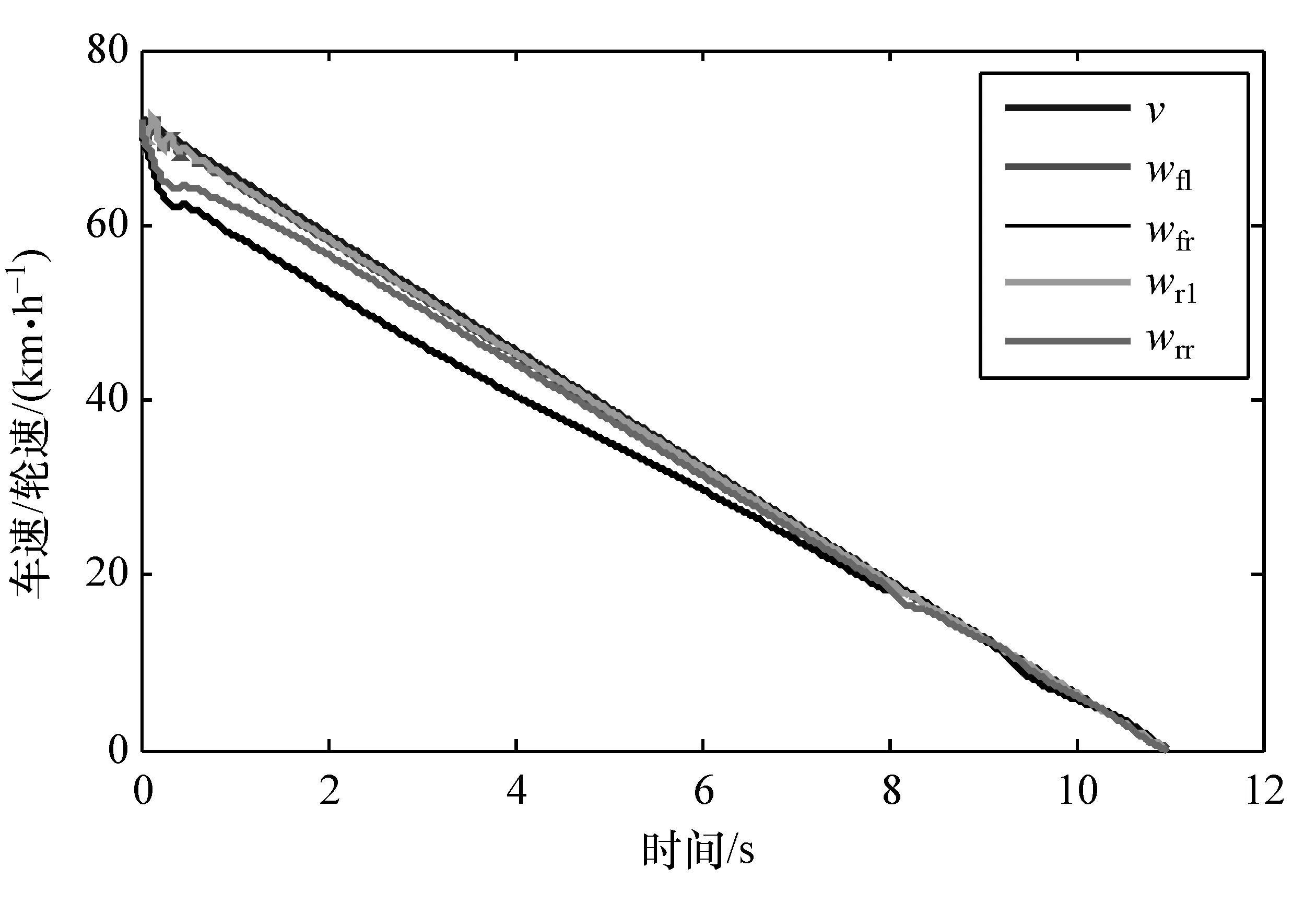
图4 车速
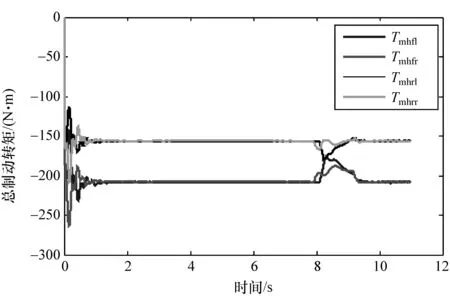
图5 总制动转矩
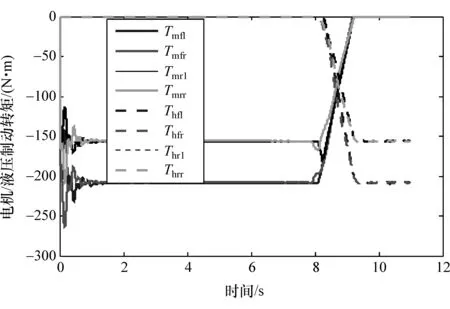
图6 电机/液压制动转矩
结果表明,车辆在对开路面上制动时,一开始横摆角速度和质心侧偏角波动较大,然后在该复合制动控制策略的控制下,横摆角速度和质心侧偏角变化曲线逐渐收敛,车辆处于稳定状态。从电机和液压的实际制动力分配来看,制动之初全部由电机制动,随着车速的下降,电机制动逐渐撤出,液压制动逐渐介入,最终制动全部由液压部分来承担。低速下电机撤出制动是由于此时电机电压很低,电机效率和控制精度较差,制动回收能量反而低于维持再生制动所消耗的能量。由于在整个制动过程中,电机制动占据主要部分,因此电池SOC值上升较大,制动能量回收较多,能量回收率达94%。可以看出,该复合制动控制策略在保证制动稳定性的同时可最大限度地回收制动能量。
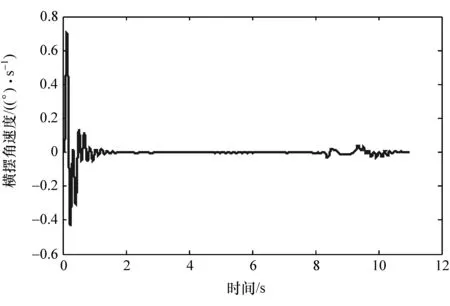
图7 横摆角速度
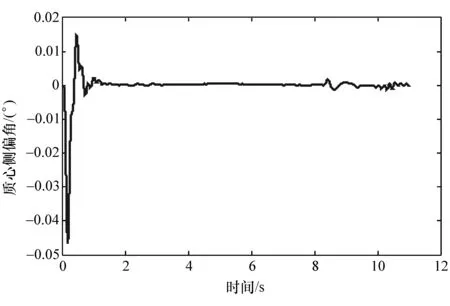
图8 质心侧偏角
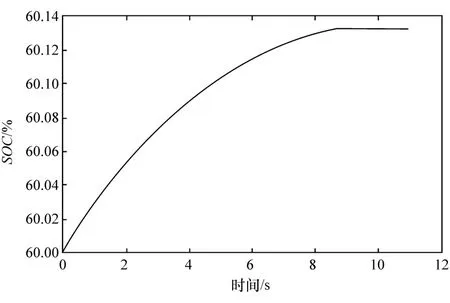
图9 电池SOC值
5 结论
(1)本文中采用滑模控制理论和加权最小二乘控制分配方法设计了分层的制动转矩分配控制结构,并采用有效集算法完成了控制分配目标函数的求解,该策略同时考虑了在计算广义力时由轮胎纵向力产生的横摆力矩的影响,通过改变分配权值,达到制动能量回收的最大化。
(2)通过Matlab/Simulink进行了对开路面工况的仿真实验,研究结果表明,该复合制动控制策略在广义横摆力矩控制决策下,保证了车辆对参考模型有效跟踪,维持了车辆制动时的稳定性,而且可以尽可能多地回收制动能量,能量回收率达到94%,凸显了该复合制动控制策略的优越性。
(3)所提出的复合制动控制策略对液压制动执行机构提出了较高的要求,需要液压制动力同样精确可调,目前可采用电子液压制动执行机构,或直接采用电子机械制动执行机构替代传统的液压制动执行机构。
猜你喜欢
能源工程(2020年6期)2021-01-26 00:55:22
山东冶金(2019年3期)2019-07-10 00:54:04
测控技术(2018年12期)2018-11-25 09:37:50
四川冶金(2018年1期)2018-09-25 02:39:26
消费导刊(2018年10期)2018-08-20 02:57:02
制造技术与机床(2017年9期)2017-11-27 02:13:45
通信电源技术(2016年1期)2016-04-16 04:57:26
自动化学报(2016年8期)2016-04-16 03:38:51
自动化学报(2016年5期)2016-04-16 03:38:49
电机与控制应用(2015年3期)2015-03-01 03:49:59