基于外部动态环境的汽车碰撞危险估计算法研究∗
2019-04-11 05:57:08吴晓建陈晓龙曾凡沂
汽车工程 2019年3期
周 兵,赵 婳,吴晓建,陈晓龙,曾凡沂
(1.湖南大学,汽车车身先进设计制造国家重点实验室,长沙 410082; 2.南昌大学,南昌 330031)
前言
国内外学者对汽车碰撞危险估计开展了大量研究。Eidehall[1]提出了一种多目标危险估计法,基于时间和距离同时对多个目标进行危险估计,并据此规划避撞路径。同济大学吴斌等[2]提出了一种基于自然驾驶数据的汽车碰撞危险评估算法,通过建立我国自然驾驶工况下的驾驶员制动和转向输入的数学模型,实现兼顾制动避撞与转向避撞的危险评估。Althoff等[3]所提出的方法则通过建立不确定性模型,预测未知驾驶意图的交通车的行驶轨迹,进而计算碰撞概率。Bálint[4]对车辆制动时的追尾场景进行数学分析和建模,根据两车相对速度进行危险估计,从而决定车辆何时开始制动以避免碰撞。Huang等[5]通过无迹变换计算行人运动的不确定性,对碰撞概率进行了估计,为行人-车辆碰撞提供了概率风险评估方法。
可以看出,已有科研人员开展了具有不确定性的碰撞危险评估,但对实际行驶过程中的路面附着状态这一动态的环境信息关注不足,而路面附着状态对车辆避撞控制往往具有重要影响。为此,本文中将使用不确定算法对动态变化的道路路面附着系数与自身车速予以考虑,利用传感器测量的状态量预测自车未来行驶轨迹。并基于这些输入信号,估算当前状态是否会引起碰撞和采取何种行为避免潜在的碰撞危险。
1 不确定性模型的建立
1.1 路面附着不确定性
紧急制动时,车辆的最大减速度是评价汽车制动性能的重要指标。考虑到路面附着系数是影响最大减速度的关键因素,它的不同决定了车辆最大减速度的差异,加之在某些路面上,附着系数随车辆行驶速度的变化也会发生急剧变化[6],例如,在潮湿路面上,附着系数随车辆行驶速度的增加而急剧变小。本文中考虑了上述影响因素,提出了一种基于模糊推理智能算法的最大减速度计算方法,即将路面状况和行驶速度综合考虑到模糊推理规则中,构建制动路面状况、行驶车速与最大减速度的模糊关系,从而快速获得当前时刻的最大制动减速度。
根据模糊理论,定义路面状况和自车速度为输入量,最大制动减速度为输出量,建立二维模糊控制器。将路面状况分为5种情况:冰路面、雪路面、砂石路面、湿混凝土/沥青路面和干混凝土/沥青路面。在Simulink中,将路面的模糊语言变量值和模糊论域分别定义为{冰路(冰),雪路(雪),砂石路(石),湿混凝土/沥青路面(湿),干混凝土/沥青路面(干)}和[0,1],隶属函数如图1(a)所示。定义输入量自车速度的模糊语言变量值和模糊论域分别为{VS,S,M,L,VL}和[0,120],隶属函数如图 1(b)所示。定义输出量最大制动减速度的模糊语言变量的8 个模糊子集为{NB,NM,NS,NO,PO,PS,PM,PB},论域为[0,10],隶属函数如图1(c)所示。据此,建立最大制动减速度的模糊推理规则,如表1所示。

图1 输入量和输出量的隶属度函数
根据模糊规则,利用Matlab设计最大制动减速度a的模糊逻辑算法,可知整个论域上输入量与输出量之间的关系,如图2所示。据此快速获取紧急制动情况下的最大减速度,为下面车辆碰撞危险估计提供基础。
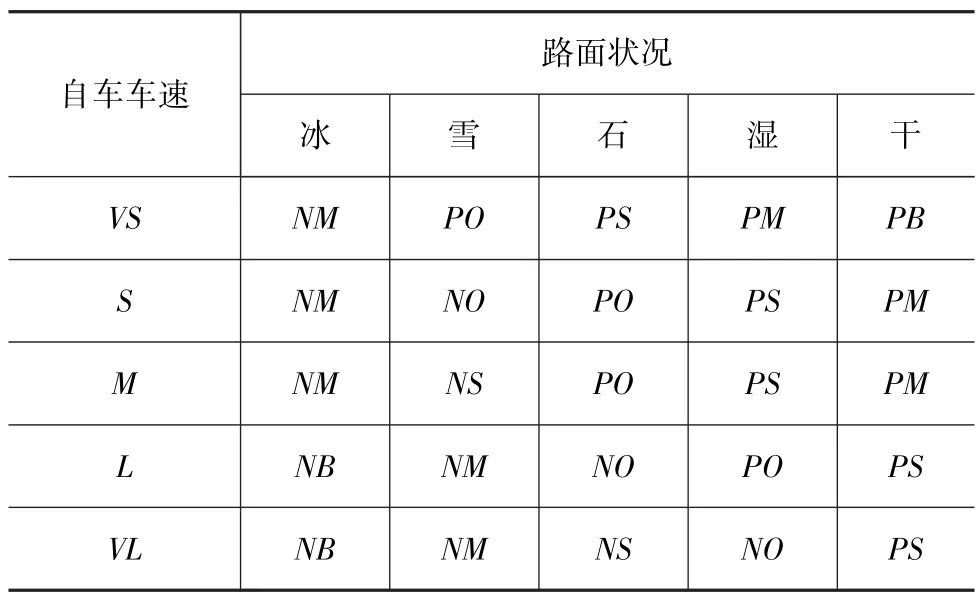
表1 最大制动减速度的模糊规则
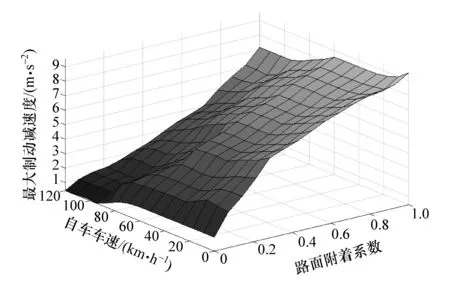
图2 最大制动减速度a的模糊逻辑算法输出量
1.2 运动学模型中的不确定性传播
采用运动学模型预测未来行驶轨迹。由于路面状况的不确定和车载传感器存在测量误差,会造成模型在初始状态和估计过程中的偏差[7]。因此,预测未来行驶轨迹过程中,在模型里加入高斯过程噪声以反映上述不确定性,从而得到预测轨迹的概率分布。常见的汽车运动学模型有:恒速度模型(CV)、恒加速度模型(CA)、恒角速度模型(CTRV)、恒转向角速度模型(CSAV)和恒角速度加速度模型(CTRA)等[8-9]。本文中以最复杂的运动学模型为研究对象,即选择恒角速度加速度模型,车辆的位置、速度、加速度和航向角数学模型如式(1)所示。

式中:x,y为汽车全局坐标系下的X轴和Y轴位置;θ为汽车的航向角;v为车体坐标系下的纵向速度;ω为汽车横摆角速度;a为汽车纵向最大加速度;ωa,ωω分别为汽车纵向、侧向加速度导数的干扰值。
由车载传感器测得自车和它车的运动状态后,通过上述模型,利用扩展卡尔曼滤波从含噪声信号的传感器测量中对汽车的状态进行递归估计[10]。给定非线性系统方程为

式中添加了高斯白噪声w(t)∈R,其功率谱密度为E[w(t)w(t′)T] =Sδ(T-T′),L∈Rn×n。
假设系统初始时刻的状态为 x^(0)~N(x^(0),Σx(0)),未来 T 时刻的状态估计 x^(T) ~ N(x^(T),Σx(T))。因此,定义f(x(t))在x(t)处的雅可比矩阵为∇F(t)=f(x(t))。可得到状态x在T时刻的期望值x^和协方差矩阵ΣX(T):

最后,利用运动学模型对预测步骤进行循环,获得每一时刻车辆状态的平均值和协方差矩阵,从而转换成具有相关不确定性的平均轨迹(在每个时间步骤中都是正态分布)。
2 碰撞概率的计算
2.1 约束条件
根据时间离散化的位置点列预测轨迹,设定自车为xE,它车为xO,预测的自车和它车的轨迹分别为xE[xE,yE]和xO[xO,yO]。通过离散后的预测轨迹点,判断任意相同时刻两车的距离是否满足安全距离条件[11]。若大于安全距离,则处于当前位置和行为的自车与它车不会产生碰撞;反之,则将会发生碰撞。设自车和它车的长、宽分别为 Lh,wh和 Lt,wt,某一时刻ti,两车中心点的坐标分别为(xbi,yhi)和(xti,yti),则由图3可知,两车不发生碰撞的约束条件为
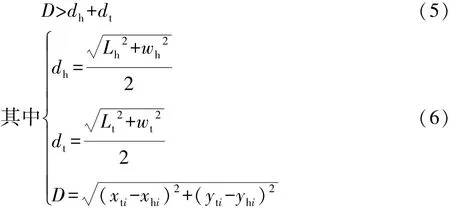
式中:D为两车中心点之间的距离;dh和dt分别为自车和它车的中心点至车边角的距离。

图3 碰撞检测示意图
2.2 碰撞概率的计算
由得出的预测轨迹不确定性和约束条件,计算自车和它车的碰撞概率,即可判断自车是否处于危险状态。在某一时刻τ,根据自车和它车位置的联合概率密度函数[12]PxE,PxO(xE(τ),xO(τ)),可求得二者的碰撞概率P(Cτ):


式中IC(xE,xO)为基于自车和它车几何形状的碰撞概率函数。
IC(xE,xO)等于1时,说明自车和它车几何图形所占空间位置存在交集,即发生碰撞;函数等于0时,则不会发生碰撞。
由于对式(7)进行积分非常复杂,不符合实时性的要求,本文中采用蒙特卡洛法求解近似概率。某一时刻,将自车和它车的轨迹离散后,每个轨迹随机采样100点,通过式(7)和式(8)重复计算某一时刻自车与它车的碰撞概率。若自车预测行驶轨迹上有M对采样点不在安全条件内,则求得此时的碰撞概率为m,此方法可满足实时性的要求。
3 自车未来行驶轨迹的预测
假设自车当前处于危险的状态,根据车辆行驶状态可通过预测自车未来短时间内的换道和紧急制动轨迹,得到两种操作情况下的危险概率,通过避撞系统的评估为车辆选择合理的避撞方式,并为驾驶员在紧急状况下的决策提供依据。因此,安全且合理的参考换道路径是车辆实现准确概率计算的前提条件[13]。根据规划路径的起始点、目标车道线切点和由汽车速度和横摆角速度得到的汽车轨迹曲率,即可得到车辆至目标车道线切点的一系列换道轨迹。换道轨迹需满足以下评价标准:(1)满足动力学约束,曲率不能过大;(2)符合实际情况,换道时间不能过长;(3)保证换道时间和舒适性[14]。根据以上约束,综合考虑当前时刻的运动状态,通过选择合理的权重值即可得到一条转向时基于车辆状态的最优换道轨迹tra,其换道合理性评价指标为

式中:aytra(t)为换道轨迹tra的侧向加速度,与轨迹的曲率成正比;aym为所有满足约束的轨迹中最大的侧向加速度;ltra为轨迹tra的长度,与换道时的持续时间成正比;lm为所有满足约束轨迹中最大的长度;w1和w2为权重系数。
J越大,说明换道路径越合理,当J达到最大时,则得到最优换道轨迹,如图4中粗实线所示。随后,根据预测得到的最优轨迹进行概率计算,得出危险评估结果。

图4 转向最优换道轨迹预测
4 仿真验证
选取典型驾驶环境中的交叉路口和前车匀速行驶、后车追尾工况为例,针对不同的路面状况采用Matlab/Simulink对以上算法进行仿真验证。
计算概率时所需的自车和它车的初始协方差矩阵和传感器的测量误差信息取自文献[15]。具体数值见表2。
4.1 交叉路口工况
假设当前行驶环境为:自车xE以速度36 km/h匀速直行通过交叉路口,它车xO以速度32.4 km/h匀速直行通过。二者行驶示意图如图5所示。
分别以冰路面、湿混凝土/沥青路面两种道路情况为例进行危险估计,取两种路面的附着系数分别为0.15和0.5,将当前车速和路面附着系数输入所构建的基于模糊推理智能算法的最大减速度快速计算系统,得到当前路面车辆的最大制动减速度分别为3.04和5.71 m/s2,计算两种路面下的制动碰撞概率,结果如图6所示。
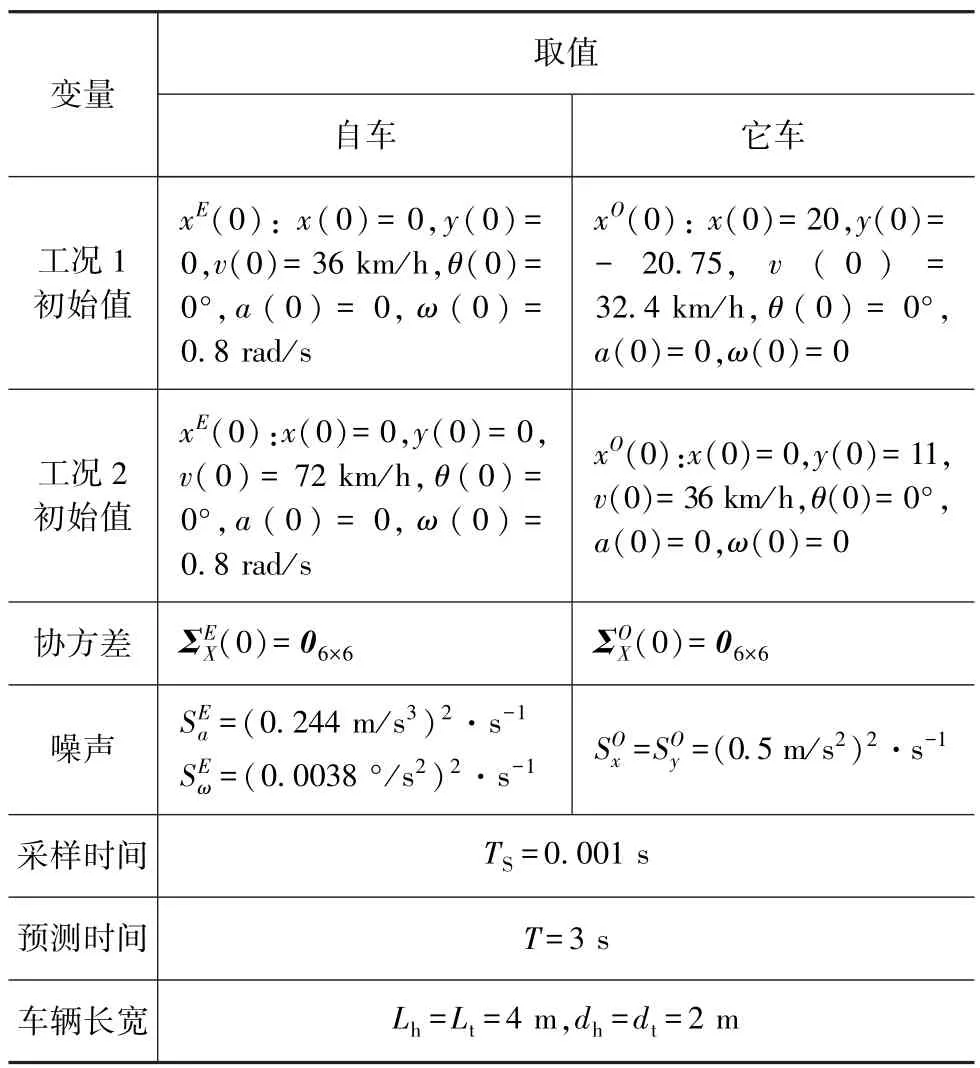
表2 评估碰撞概率的模拟参数
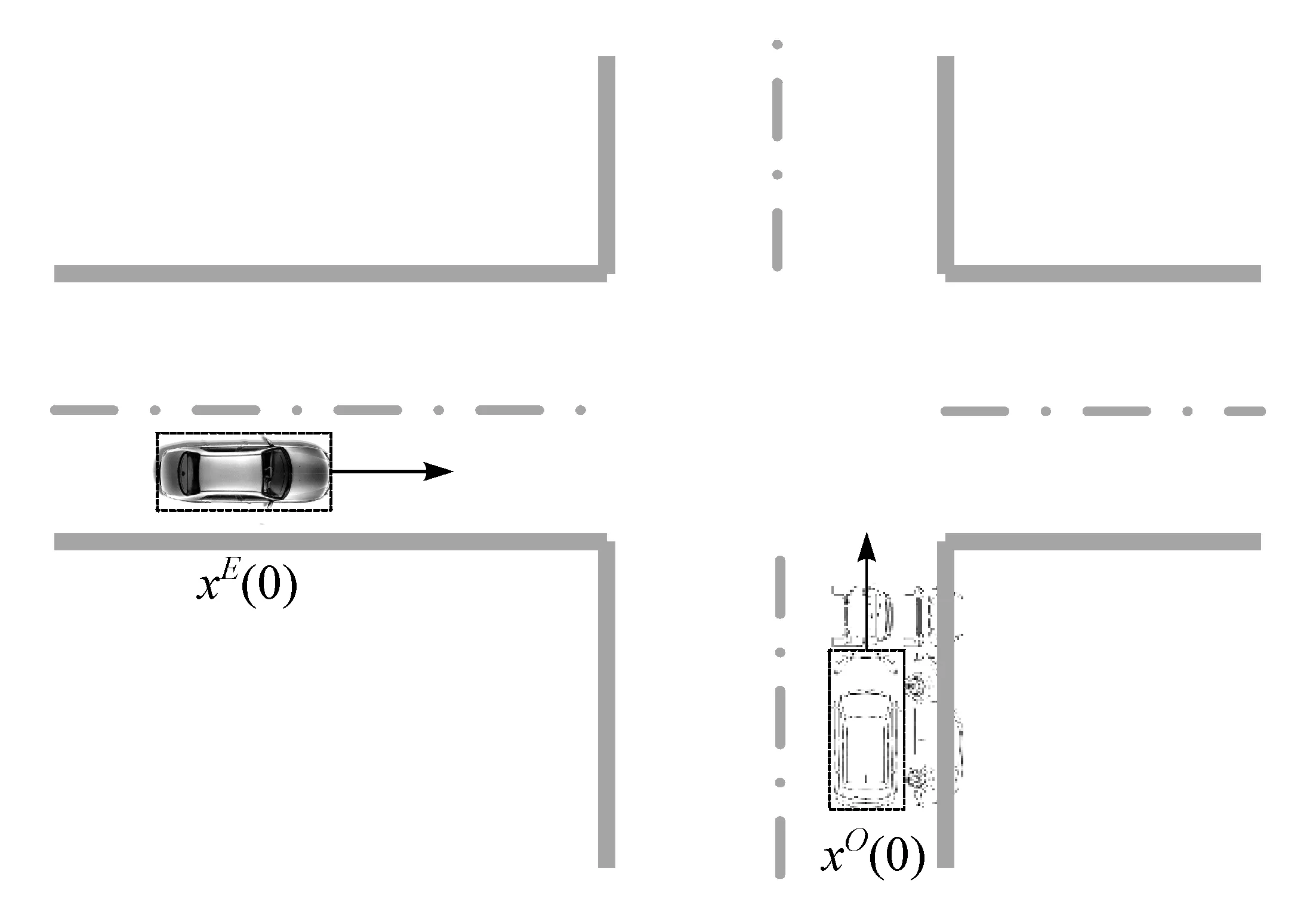
图5 交叉路口工况行驶环境示意图
从图6(a)看出,当前构建的行驶环境,自车在冰路面上的最大制动减速度偏小,纵向制动避撞方式的碰撞风险高达0.85,与之相比,采用预测的转向最优换道轨迹,则将碰撞风险降低到极低的水平,由此说明此时应采取转向避撞的方式以提高车辆的碰撞安全性。从图6(b)看出,在附着系数较大的湿混凝土/沥青路面上,路面能够提供较大的制动减速度,自车紧急制动发生碰撞的概率几乎为0,因此驾驶员通过紧急制动即可避免交通事故的发生。
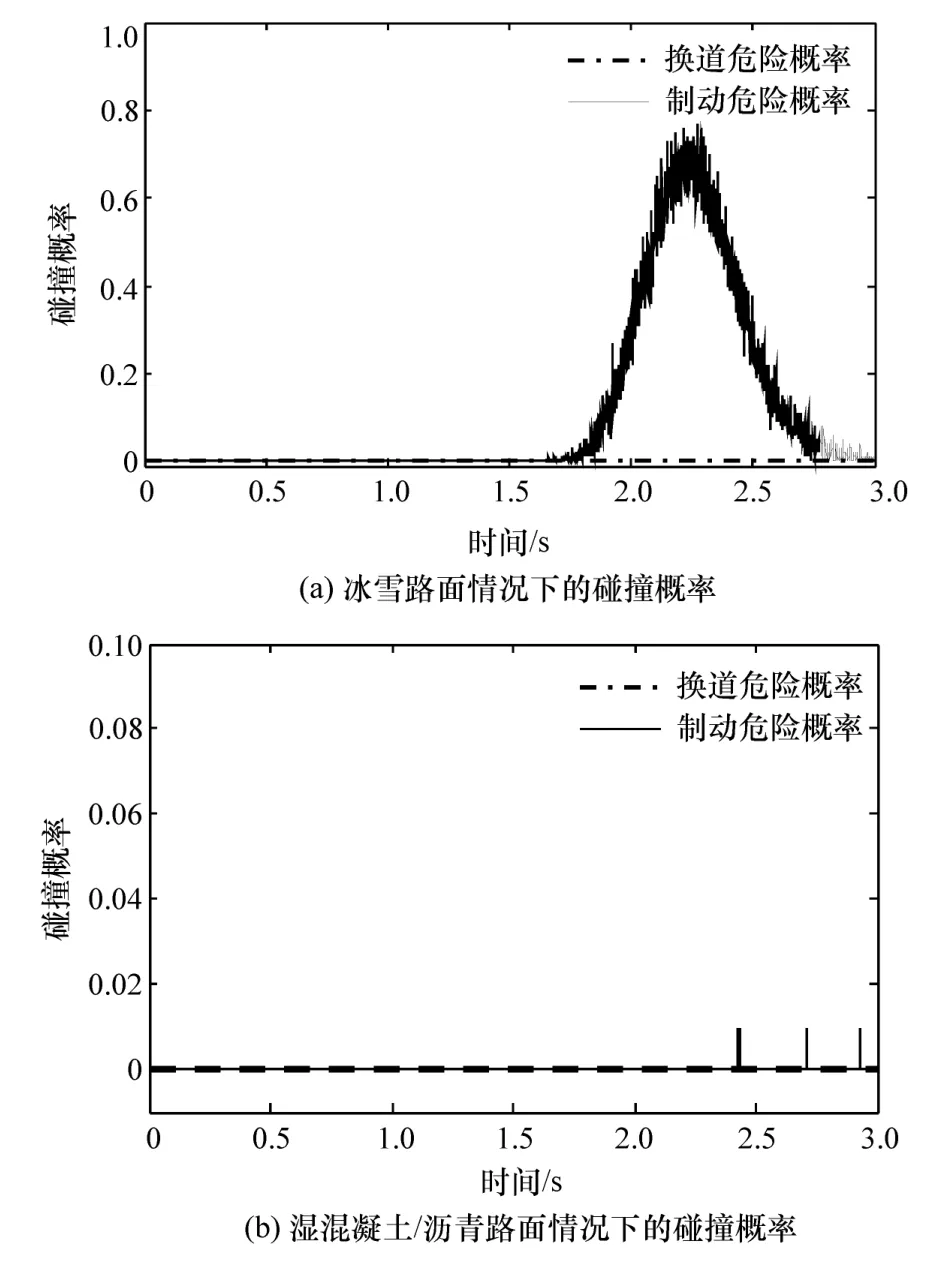
图6 两种路面状况下换道和紧急制动的碰撞概率对比
4.2 追尾工况
当前行驶环境设置为:自车以72 km/h的车速行驶,它车在前方11 m处以36 km/h的车速行驶,如图7所示。

图7 追尾工况行驶环境示意图
显然,若自车不进行避撞操作,将会与前车发生碰撞。以冰雪路面和干混凝土/沥青路面两种道路工况为例进行碰撞危险估计,取两种路面的附着系数分别为0.3和0.7,由当前车速和路面附着系数输入模糊规则表得到当前路面车辆的最大制动减速度分别为3.41和6.16 m/s2。通过含不确定性的运动学模型分别计算制动和转向避撞的概率,结果如图8所示。
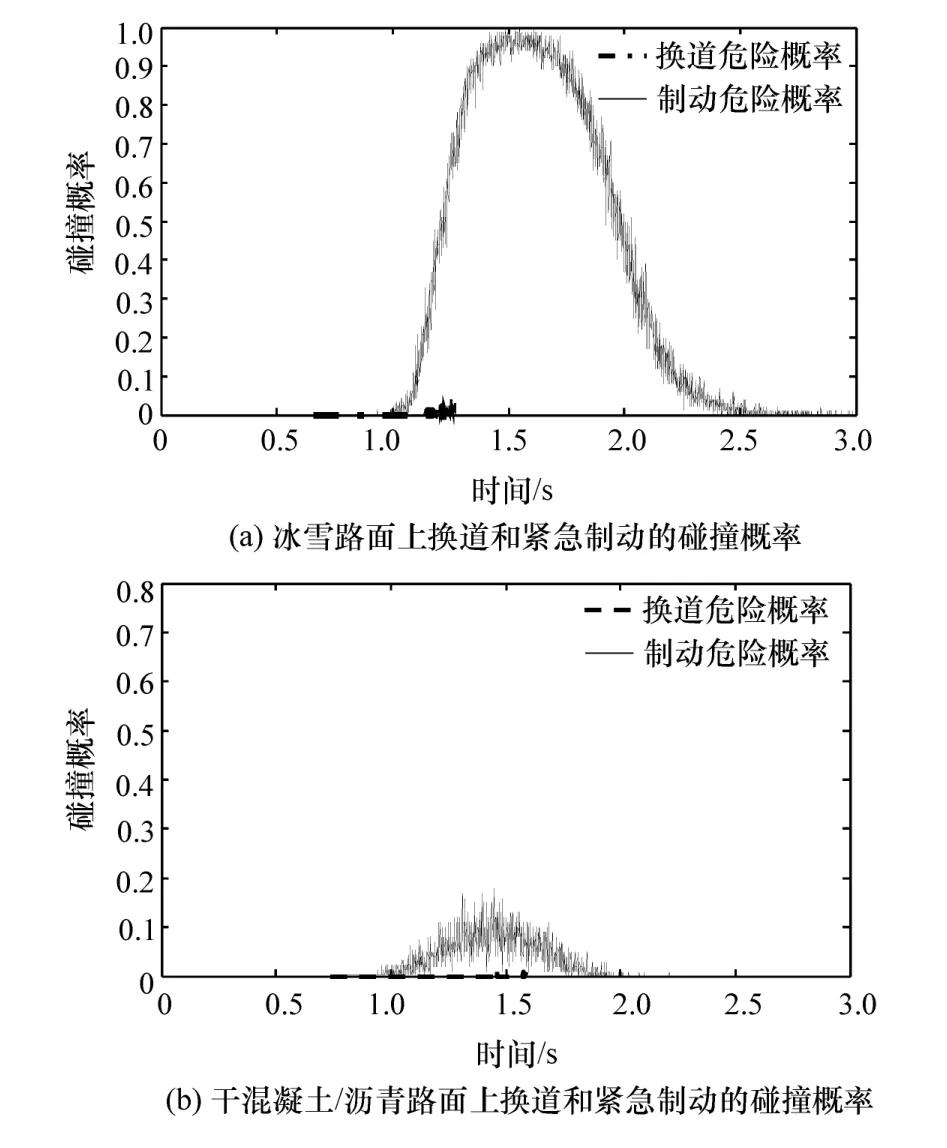
图8 两种路面状况下换道和紧急制动的碰撞概率对比
若不考虑噪声干扰和不确定性,则在冰雪路面上采用制动避撞方式,通过计算将在1.47 s时刻发生碰撞。从图8(a)看出,车辆在附着系数较小的冰雪路面上行驶时,紧急制动避撞方式约在1.5 s出现极高的碰撞风险,这与计算值1.47 s非常吻合;由图8(a)还可知,此时,采用转向避撞的方式,碰撞最大风险仅为0.15。由此可知,当前工况应选择转向换道避撞以保障车辆的碰撞安全性。从图8(b)看出,当路面为干混凝土/沥青时,因其能提供较大的附着力,采用制动避撞的方法面临的最大碰撞概率约为0.1,即通过制动就可避免追尾的发生。
以上仿真结果表明,所构造的含不确定性因素的碰撞风险估计算法能适应车辆行驶时的外部动态环境变化,作出合理的碰撞概率预测,其针对性的避撞决策符合真实交通环境的避撞操作。
5 结论
(1)考虑路面状况和车辆状态的不确定性如量测噪声干扰,建立了不确定性预测模型;运用模糊理论智能算法,设计了一种考虑车辆路面动态环境的最大纵向加速度快速确定方法。
(2)根据所建立的不确定性预测模型和初始点位置预测推导得出汽车行驶轨迹分布的概率密度函数,采用蒙特卡洛法求解碰撞概率,为紧急情况下的避撞决策提供依据。不同附着系数的交叉路口和追尾场景仿真验证了所提出的碰撞风险评估与决策系统的有效性和可行性。
猜你喜欢
法律方法(2022年2期)2022-10-20 06:41:56
中学生数理化·中考版(2022年6期)2022-06-05 06:49:10
中学生数理化·中考版(2021年6期)2021-11-22 07:52:30
新世纪智能(数学备考)(2021年4期)2021-08-06 09:04:50
新世纪智能(数学备考)(2021年4期)2021-08-06 09:04:50
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
中国外汇(2019年7期)2019-07-13 05:45:04
现代装饰(2018年5期)2018-05-26 09:09:39
中国三峡(2017年2期)2017-06-09 08:15:29