一种快速的同时多机动目标参数估计方法
2019-03-22 05:40:46,,
雷达科学与技术 2019年1期
, ,
(1.电子科技大学, 四川成都 611731;2.中国地质大学(武汉), 湖北武汉 430074;3.广东电网公司佛山供电局, 广东佛山 528500)
0 引 言
快速的同时多机动目标参数估计是当前研究的热点之一[1-3]。在战争环境中,及时地获取信息是决定胜负的关键因素之一,随着导弹、歼击机等空中目标的机动性越来越强,且通常情况下空中会同时存在多个机动目标,同时多个机动目标的快速检测成为迫切需求。
目前的机动目标参数估计方法主要有以下两类:第一类方法是基于多项式相位信号(Polynomial Phase Signal, PPS)的方法,如高阶模糊函数(High-Order Ambiguity Function, HAF)法[4-5]。它利用高阶模糊函数以及相应的解模糊的方法来估计PPS的参数,但一次只能估计一个机动目标参数,并且需要的信噪比门限高。第二类方法是时频分析类的方法,典型的有维格纳威利分布 (Wigner-Ville Distribution, WVD)方法[6-9]、维格纳霍夫变换(Wigner-Hough Transform, WHT)方法[10-11]和分数阶傅里叶变换(Fractional Fourier Transform, FRFT)方法[12-14]。这类方法解决了第一类方法中的信噪比门限高以及不能同时多目标估计的问题,将信号从时域变换到时频域,在时频域内进行机动目标的参数估计和检测。然而,当同时存在多个目标估计时,时频分析类的方法通常会存在交叉项的干扰,难以同时估计多个机动目标的参数。WHT法运用Wigner-Hough变换,有效抑制了存在多目标时WVD中的交叉项,但涉及到Hough变换,增加了整体计算量[10]。另外,FRFT法运用其对信号能量的独特聚集特性来对信号进行检测,对LFM信号有着良好的效果,但是由于需要进行二维搜索,FRFT法的运算量也大大增加[14]。
针对上述问题,本文注意到机动目标信号的高阶相邻自相关函数(Higher-Order Adjacent Cross Correlation Function,HACCF)的展开式中,自相关项是与相邻延时无关的常数项,而交叉项则是以相邻延时为变量的函数,因此可以对HACCF求均值提取出常数项,该常数项就是自相关项,从而有效地抑制了交叉项。根据该特点,本文提出了一种快速同时多机动目标参数估计方法。该方法首先对HACCF计算平均值,再对均值项进行频率估计得到目标加速度谱,从而获得目标加速度估计值。
与已有方法相比,本文方法具有以下优点: 1) 有多个目标的情况下,能有效抑制交叉项,同时估计出多个目标的加速度;2) 大幅降低了运算量,能快速估计出参数;3) 精度高于HAF[4], FRFT[12]等算法。
1 问题描述
设背景为高斯白噪声,在观测时间T0内,机动目标的雷达回波信号模型可表示为

0≤t≤T
(1)
式中,A为目标回波幅度,fc为信号的中心频率,v0为机动目标径向初始速度,a为径向加速度。
将上式离散化,可得到机动目标的回波信号的离散表示式:

w(nT), 0≤n≤N-1
(2)
式中,T为脉冲重复周期,N为回波信号采样点数。
将式(2)表示为多项式相位信号:
x(n)=A·exp[j(a0+a1+a2n2)]
(3)

2 所提算法
本节首先将信号的HACCF展开,在此基础上分析了该展开式中其自相关项和交叉项关于相邻延时n的最大次数的特征,发现自相关项是与相邻延时n无关的常数项,而交叉项是以相邻延时为变量的函数。根据该特点,本节利用“求均值”的方法提出常数的自相关项,实现对交叉项的抑制;在此基础上对常数项进行频率估计和转换即可得到加速度谱,从而估计出加速度;用估计的加速度对信号进行补偿即可估计出目标初始速度等参数。所提方法计算量小,并且可同时估计多个机动目标参数。
2.1 高阶相邻自相关函数(HACCF)
本文定义机动目标的回波信号的相邻自相关函数(Adjacent Cross Correlation Function,ACCF)为
(4)

考虑到当有多个机动目标时,雷达回波信号的ACCF中,不同机动目标信号之间的交叉干扰严重。针对该问题,本文进一步提出了信号的高阶相邻互相关函数(HACCF),在该HACCF函数中,不同信号的自相关项和交叉项具有不同特征,理论上可以完全分离。
本文所提HACCF函数定义为
H(t,τ)=(s*(t))2s(t+τ)s(t-τ)
(5)
2.2 机动目标回波的HACCF特性分析
考虑雷达回波信号中同时有两个机动目标的情况,设雷达总的回波信号为
x(n)=x1(n)+x2(n)
(6)
式中,目标1回波信号为
x1(n)=A1exp[j(a0,1+a1,1n+a2,1n2)]
(7)
目标2回波信号为
x2(n)=A2exp[j(a0,2+a1,2n+a2,2n2)]
(8)
式中,a的第一个下标代表多项式相位信号的不同的参数,第二个下标用来区分目标1和目标2。
对x(n)进行HACCF变换,得到

[x1(n+τ)+x2(n+τ)]·
[x1(n-τ)+x2(n-τ)]=
(9)
将式(9)每一项相乘并展开,得到

(10)
式中,前2项为自相关项,后面的项为交叉项。
将式(7)、式(8)代入式(10),得到

(a1,1-a1,2)+(a2,1+a2,2)τ2+
[-(a1,1-a1,2)+2(a2,1-a2,2)τ]n-(a2,1-a2,2)n2]}+
(a1,1-a1,2)+(a2,1+a2,2)τ2+
[-(a1,1-a1,2)-2(a2,1-a2,2)τ]n-(a2,1-a2,2)n2]}+…+
(a2,1+a2,2)τ2+2(a2,1-a2,2)τn]}+
(a1,1-a1,2)n-(a2,1-a2,2)n2]}+
(a2,1+a2,2)τ2-2(a2,1-a2,2)τn]}
(11)
首先假设n是时间变量,把τ看作常量,观察式(11)中n的最大次数,发现自相关项中并不包含时间变量n,即自相关项对于时间变量n来说是常数项;而交叉项中都含有时间变量n。对于机动目标来说,自相关项中n的次数为0,而交叉项中n的次数不为0,即交叉项是时间变量n的一次或二次函数,而自相关项是与时间变量n无关的常数项。


本文所提算法的主要步骤为:
1) 计算雷达回波信号的HACCF;
2) 把n看作变量,对HACCF结果在n轴方向求均值,得到常数项和非常数项;
3) 把τ2看作变量,对常数项进行离散傅里叶变换(也可以用其他频率估计算法),经式(12)的转换后得到目标的加速度谱:
(12)
2.3 算法复杂度分析
本文所提算法使用“求均值”的简单方法提取出自相关项,然后进行离散傅里叶变换,故运算量非常小。设信号的采样点数为N,M为搜索次数,则本文所提算法运算量为O(N2+Nlog2N);而文献[10]中的WHT算法的运算量为O(MN2log2N),文献[13]中的FRFT算法需要在分数阶Fourier域进行双参数的二维搜索,本文算法只需进行一维搜索即可得到加速度的估计值,故综合考虑,本文所提算法的运算量较小。
3 仿真实验分析
为了证明所提算法的有效性,本节将分别进行两个部分的仿真,第一部分是多目标同时估计,采用天波超视距雷达的实测数据进行仿真,与WHT算法进行对比,证明所提算法能同时估计多目标的加速度值,且运算量小、精确度高。第二部分是性能对比分析,为了验证不同信噪比和不同运动状态下的估计性能,进行Monte-Carlo实验,得到不同信噪比情况下加速度的均方误差曲线,并且与文献[4]和文献[12]所提算法进行对比,证明本算法的精度。
3.1 多目标同时估计
仿真场景:采用天波超视距雷达的实测数据进行仿真,其中,雷达频率fc为18.3 MHz,采样点数N为512,采样时间为12 ms,在回波中添加两个目标:目标1的初速度为-300 m/s,加速度为-30 m/s2,目标2的初速度为200 m/s,加速度为20 m/s2。
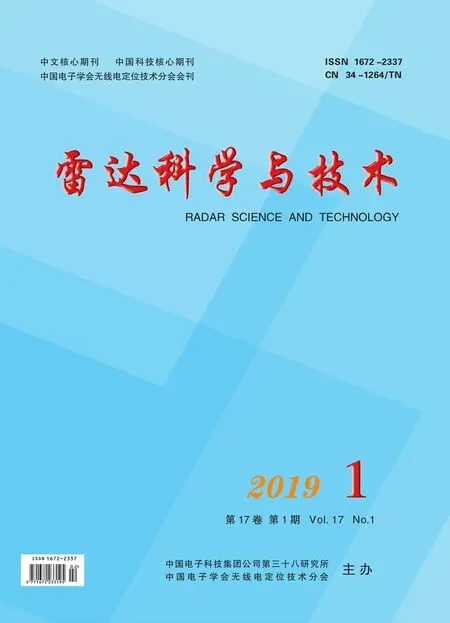
表1为本文提出的算法和文献[10]中的WHT算法同时估计两个目标时的加速度估计对比。从该对比结果可见,在估计两个目标时,本文所提算法的精度略高于WHT,但本文所提算法在运算量上与WHT算法相比,有很大的优势。
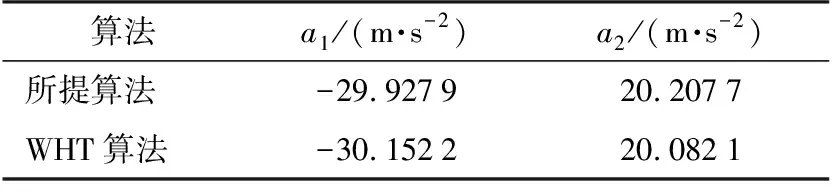
表 1 两个目标加速度对比
图1为未加入目标时的实测海杂波数据的频谱图,图2为加入两个机动目标后的频谱图,在图中可以大致分辨出目标的位置。
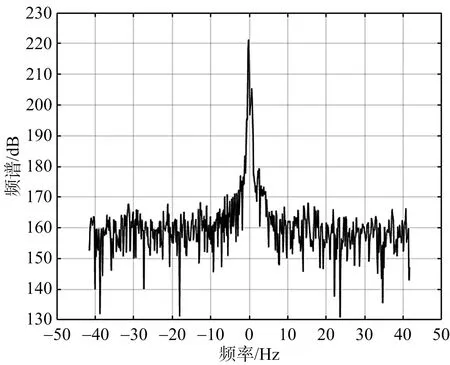
图1 未加入目标的海杂波频谱图
图2 加入目标后的频谱图
图3为对HACCF求均值后,在n轴上计算均值得到的波形,等价于正弦信号加噪声的波形图。

图3 求均值后的信号波形图
图4和图5为使用估计得到的加速度的值,分别对目标一和目标二进行补偿后得到的频谱图。从图中可以看出经过补偿后,目标回波能量得到了有效的聚集,可以明显分辨出两个目标,且本文所提算法性能略高于WHT算法。
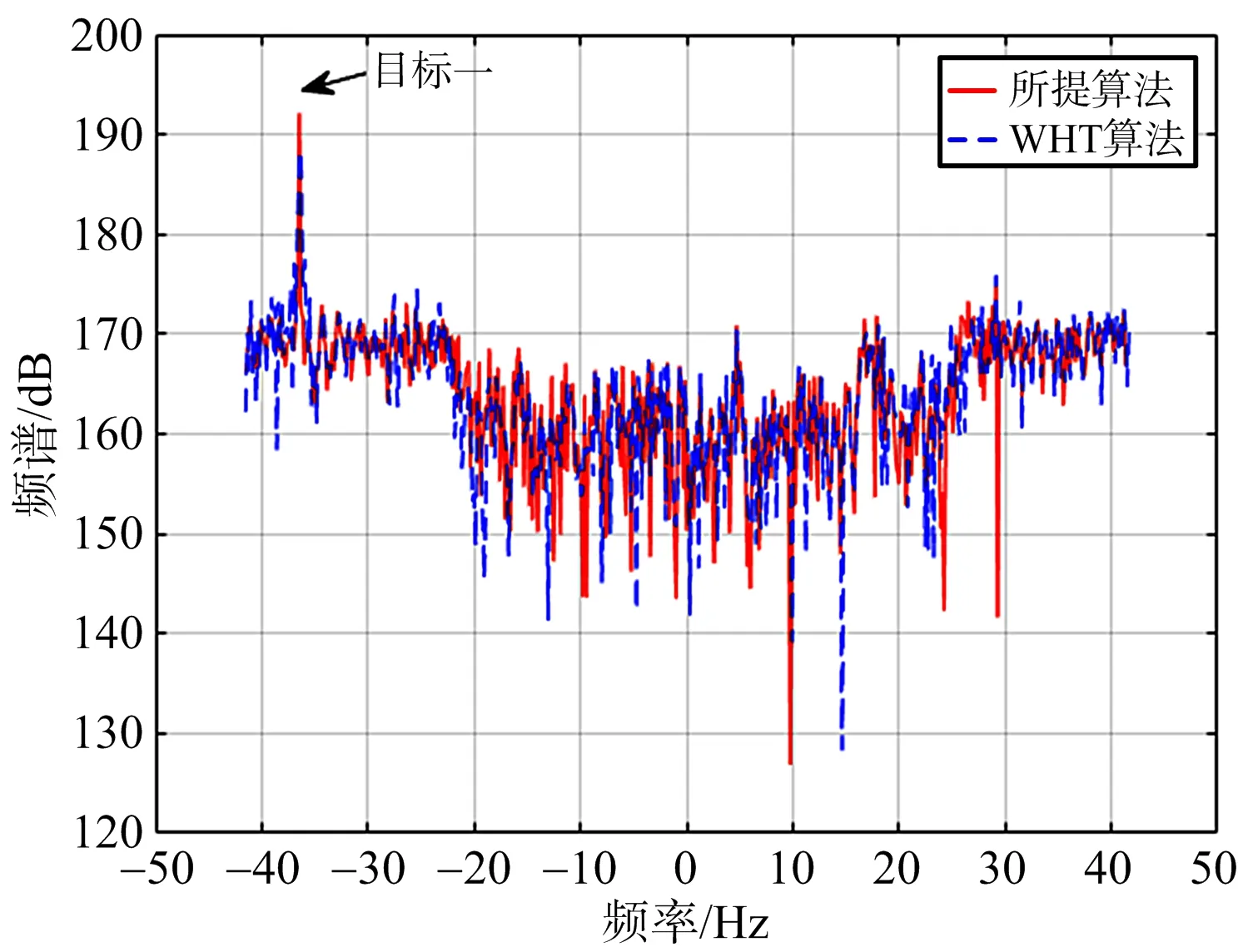
图4 补偿目标一后的频谱图
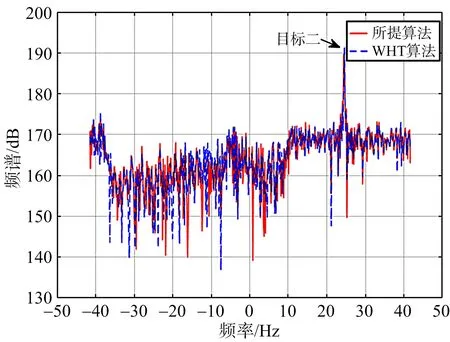
图5 补偿目标二后的频谱图
图6为机动目标的加速度谱,为了更直观地表示出加速度的估计值,此处已将估计所得频率转换为加速度的值表示在图中,图中两个谱峰对应两个机动目标的加速度估计值。
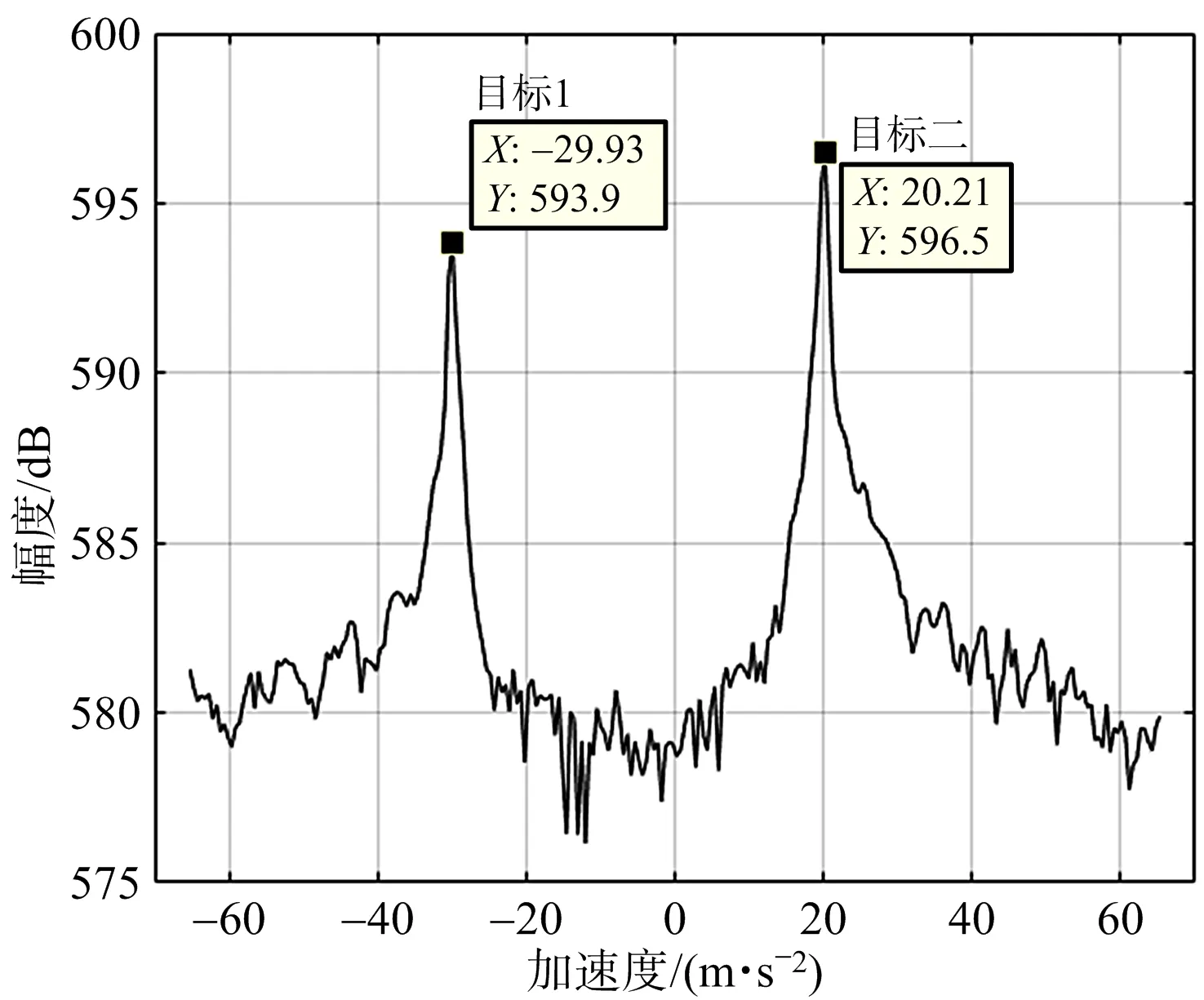
图6 目标加速度谱
3.2 估计精度对比分析
仿真场景:雷达载波频率fc为10 MHz,采样点数N为512,采样时间为12 ms,为了便于分析,幅度值取1,目标的初速度为30 m/s,加速度为18 m/s2,初始距离为1 000 km,信噪比的范围为-8~10 dB。
图7是本文所提算法和文献[4]的HAF算法及文献[12]的FRFT算法在不同信噪比下加速度估计结果的均方误差曲线,为100次Monte-Carlo实验的结果。从图7可以看出,本文所提算法和HAF算法的估计精度均随着信噪比增高而提升,但本文所提算法的精确度始终高于HAF算法,当信噪比大于-4 dB后,本文算法的估计精度趋于稳定,且精度是3种算法中最高的。
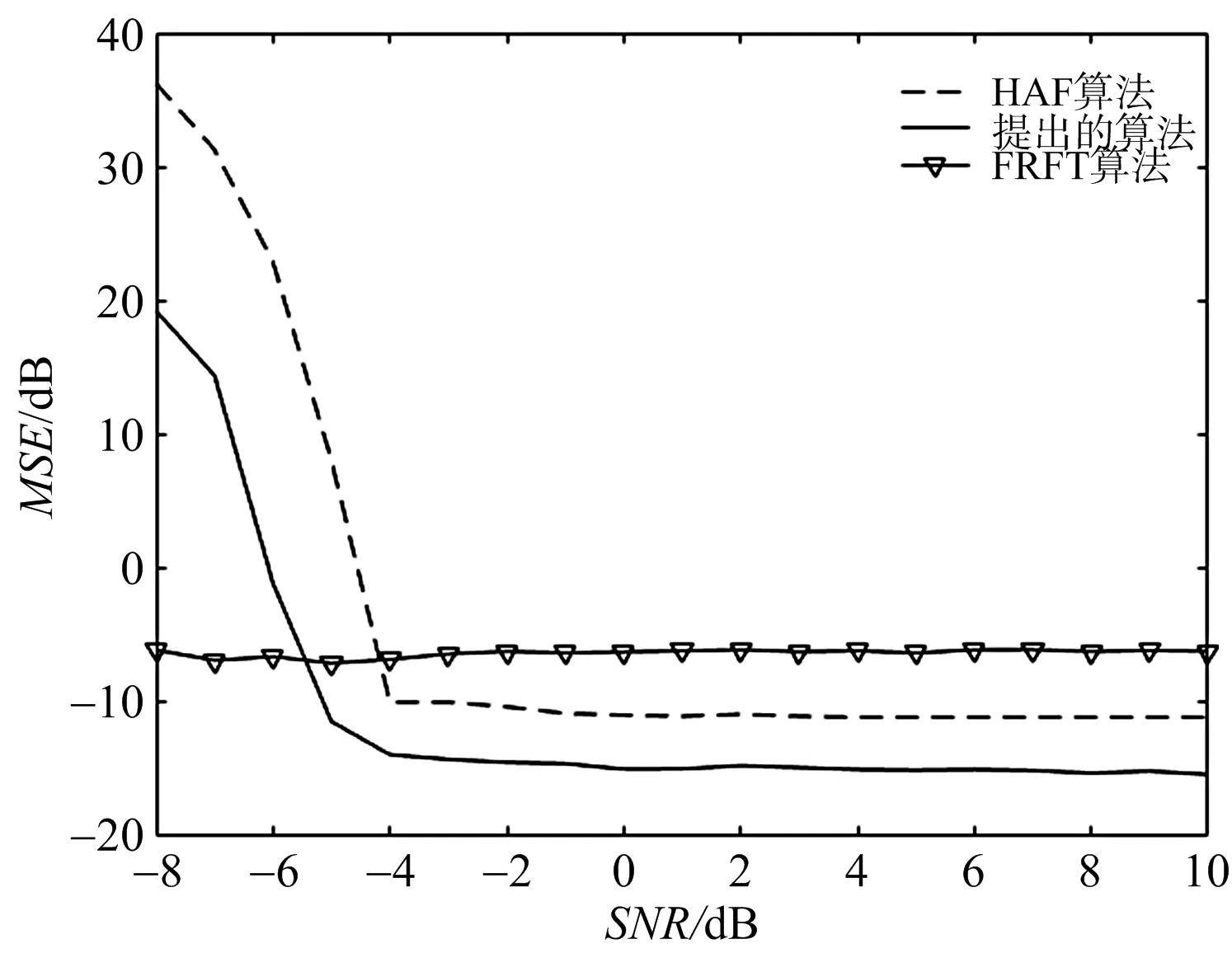
图7 3种算法的MSE曲线
4 结束语
本文针对已有的机动目标参数估计算法在估计多目标时存在交叉项干扰和运算量大的问题,提出了基于高阶相邻自相关函数的多机动目标加速度估计方法。本文所提算法与常规方法相比,克服了多目标加速度估计中存在严重的交叉项的问题,且大幅减少了运算量,可在短时间内得到估计结果,具有较好的工程适用价值。
猜你喜欢
装备制造技术(2020年3期)2020-12-25 05:21:52
北京航空航天大学学报(2019年9期)2019-10-26 02:30:12
当代陕西(2019年12期)2019-07-12 09:12:02
中学生理科应试(2019年3期)2019-07-08 03:54:24
汉语世界(The World of Chinese)(2019年1期)2019-03-18 01:50:16
电子测试(2018年11期)2018-06-26 05:56:02
湖南教育·C版(2018年3期)2018-06-05 16:54:36
雷达学报(2017年3期)2018-01-19 02:01:27
福建中学数学(2016年7期)2016-12-03 07:10:28
西南石油大学学报(自然科学版)(2015年5期)2015-04-16 05:12:24