分布式MIMO雷达的目标定位
2019-03-22 05:41:34,,
雷达科学与技术 2019年1期
, ,
(1.驻马店职业技术学院, 河南驻马店 463000;2.黄淮学院国际教育学院, 河南驻马店 463000)
0 引 言
近期,多输入多输出(Multiple-Input Multiple-Output, MIMO)雷达系统得到迅速发展。由于MIMO雷达系统在检测和定位方面的优势,MIMO雷达系统也得到广泛关注。通常将MIMO雷达分为隔离(分布式)天线[1]和阵列天线[2]两类。前者充分利用空间分集,而后者是充分利用波形分集。
目前,研究人员对分布式雷达[3-4]的目标位置估计进行了大量的研究。雷达定位算法通常可划分为直接或间接两类。后者首先利用互模糊函数测量延时时间,然后再将时间与信号传播速度相乘,进而获取双基测距(Bistatic Range, BR)值,其是发射器-目标和目标-接收器的距离之和。这些BR值可形成一系列的椭圆等式,再通过这些等式估计目标位置。文献[5]提出线性无偏差估计算法,并利用泰勒序列展开算法求解非线性等式。但是,此算法的不足之处在于定位精度依赖于初始值。文献[6]提出封闭式最小二乘(Least Square, LS)算法。此外,文献[7]将目标定位问题转化为约束二次等式规划(QCQP)问题,进而对椭圆等式进行线性化,然后再利用权重LS算法(WLS)求解,最终获取目标的位置。而文献[8]提出一个分布式目标定位算法。此算法先依据不同的发射参数或接收参数将测量值划分不同的聚类,然后再在每个聚类内利用双重WLS估计算法,进而获取独立的目标位置的估计值。然后,再将不同聚类的位置估计值进行融合,形成最终的估计值。文献[9]和文献[10]分别提出基于封闭的一种WLS(OSWLS)的目标定位算法。
为此,本文先将目标定位问题转化为QCQP问题。由于QCQP的约束条件是非凸的,因此,QCQP问题为非凸、NP-hard。为了解决此问题,将每个非凸约束转化为线性约束。通过将QCQP问题转化为线性约束二次规划(LCQP)问题,再利用迭代CWLS算法求解,最终获取目标位置的解。
1 问题的描述
假定分布式的MIMO雷达系统由M个发射和N个接收天线组成。假定第i个发射器和第j个接收器的位置分别为xt,i=[xt,iyt,izt,i]T和xr,j=[xr,jyr,jzr,j]T,且i=1,…,M,j=1,…,N。发射器发射一系列正交波,由未知目标反射。目标位置表示为x0=[x0y0z0]T。然后,接收器分别收集来自发射器和目标的直接和反射信号,进而估计目标位置。
假定目标与第i个发射器的欧式距离rt,i:
(1)
相应地,目标与第j个接收器的欧式距离rr,j:

(2)
BR定义为目标与发射器的欧式距离rt,i和目标与接收器的欧式距离rr,j之和,如式(3)所示:
ri,j=rt,i+rr,j
(3)
对式(3)两边平方,并令αi=rt,i,再经代数处理,可得
(4)
(5)
通过忽略式(5)的二次噪声项,测距误差可表示为
(6)

将式(6)转换成矩阵形式,并考虑所有发射器和接收器,便可形成
(7)



(8)
为此,可将误差矢量ε表述关于噪声变量n的函数:
ε=Bn
(9)

(10)
注意到式(7)是关于θ的线性关系。因此,可通过WLS估计算法求解未知矢量θ。可通过最小成本函数εTwε获取式(7)的WLS的解,如式(11)所示:
(11)
式中,W为对称正矩阵,其定义如式(12)所示:
W=E[εεT]-1=(BQBT)-1
(12)
式中,Q=E[nnT]-1表示噪声协方差矩阵。值得注意的是,未知位置矢量θ由未知目标位置x0和参数α组成。由于未知目标位置和参数αi,且i=1,…,M并非相互独立。因此,通过式(11)求解式(7)的解并非是式(7)的最优解。
为了提高定位精度,可将未知位置x0与参数中每个参数的关系应用于定位问题。因此,通过考虑这些关系,定位问题可表述为[7]
(13)
式(13)所示的目标定位的问题是一个非凸二次等式优化问题。
接下来用迭代的CWLS算法求解式(13)问题搜索目标的过程中,有许多随机因素的影响,所以雷达发现目标的距离也是一个随机变量。
2 迭代CWLS(ICWLS)算法
雷达的ICWLS算法先将式(13)所示的目标定位问题转化为约束二次等式规划问题(QCQP),然后再通过对非凸约束进行转换,将QCQP问题转化为LCQP问题,最后再利用ICWLS算法求解,获取目标位置,如图1所示。
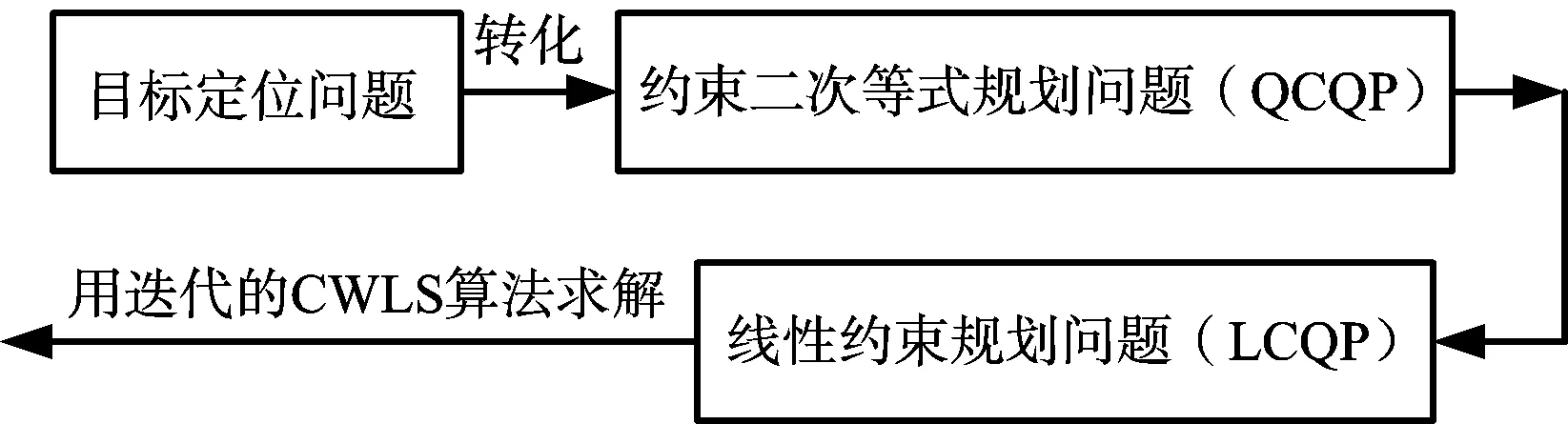
图1 目标定位问题的求解过程
2.1 QCQP问题
将式(13)的目标定位问题从非凸转化为凸式问题,如式(14)所示:
(14)

尽管式(14)的目标函数是凸的,但是二次等式约束仍是非凸的。因此,式(14)所示的目标问题属于非凸QCQP问题,其通常也是NP-hard问题。
2.2 LCQP问题

(15)

2.3 基于ICWLS求解LCQP问题的解
为了推导式(15)所示的LCQP问题的最优解,将线性约束转化矩阵形式,进而形成等式约束:
Gθ=g
(16)
式中,G=[c1…cM]T,g=[g1…gM]T。
依据矩阵的广义逆理论(Generalized Inverse Theory),式(16)的解可表示为
(17)
式中,ξ为arbitrary矢量,P-=I-G+G为投影矩阵,而G+的定义如式(18)所示:
G+=GT(GGT)-1
(18)
将式(17)代入式(15)所示的目标函数,便可产生:
(19)
最小化关于变量θ的式(15)所示的目标函数,等于通过变量ξ最小化式(19)。因此,式(19)右边进行关于ξ的偏导数,并令其等于零,便可获取ξ的最优值:
(20)

(21)
(22)
将每次迭代的最终解看成上次迭代的解与式(15)问题的解的结合,因此,对于第k次迭代,可得[11]
(23)
式中,λ为遗忘因子,且0<λ<1。λ值越大,收敛速度越快。因此,ICWLS算法通过迭代地解决定位问题,并更新解。
迭代CWLS的目标定位算法总结如下:
1) 参数初始化:
2) 设置迭代次数k=k+1,再运用近似LCQP算法:

3) 再求解第2)步的解:


4) 获取第k次迭代的目标位置估计值:

5) 检测是否满足收敛。即检测是否满足式(24),其中δ为收敛阈值。如果满足,则终止迭代,否则进入第6)步。
(24)

3 仿真结果分析
为了更好地分析ICWLS定位算法的性能,建立Monte Carlo仿真实验。考虑文献[12]所述的MIMO雷达系统,且M=9,N=8。这9个发射器和8个接收器的参数如表1所示。

表1 9个发射器和8个接收器的参数
此外,BR中的测量噪声服从零均值的高斯分布,且已知方差[10],其仅依赖于每对发-收的信噪比。因此,BR的测量值只受加性高斯噪声影响,其标准方差σi,j=σ0rt,irr,j/R0,i=1,…,M,j=1,…,N,其中σ0为常数,R0为监测区域半径。
同时,将选择文献[10]的OSWLS、文献[7]的WLS算法、文献[8]的TSWLS和文献[8]所推导的CRLB算法作为参考,并已对本文所提出的ICWLS算法进行比较。并选择均方根误差(Root Mean Square Error, RMSE)作为性能指标,其定义如式(25)所示:

(25)

3.1 实验一
本次实验分析目标x0位于[100 400 200]T时的ICWLS定位性能,且R0=600 m,实验数据如图2所示。
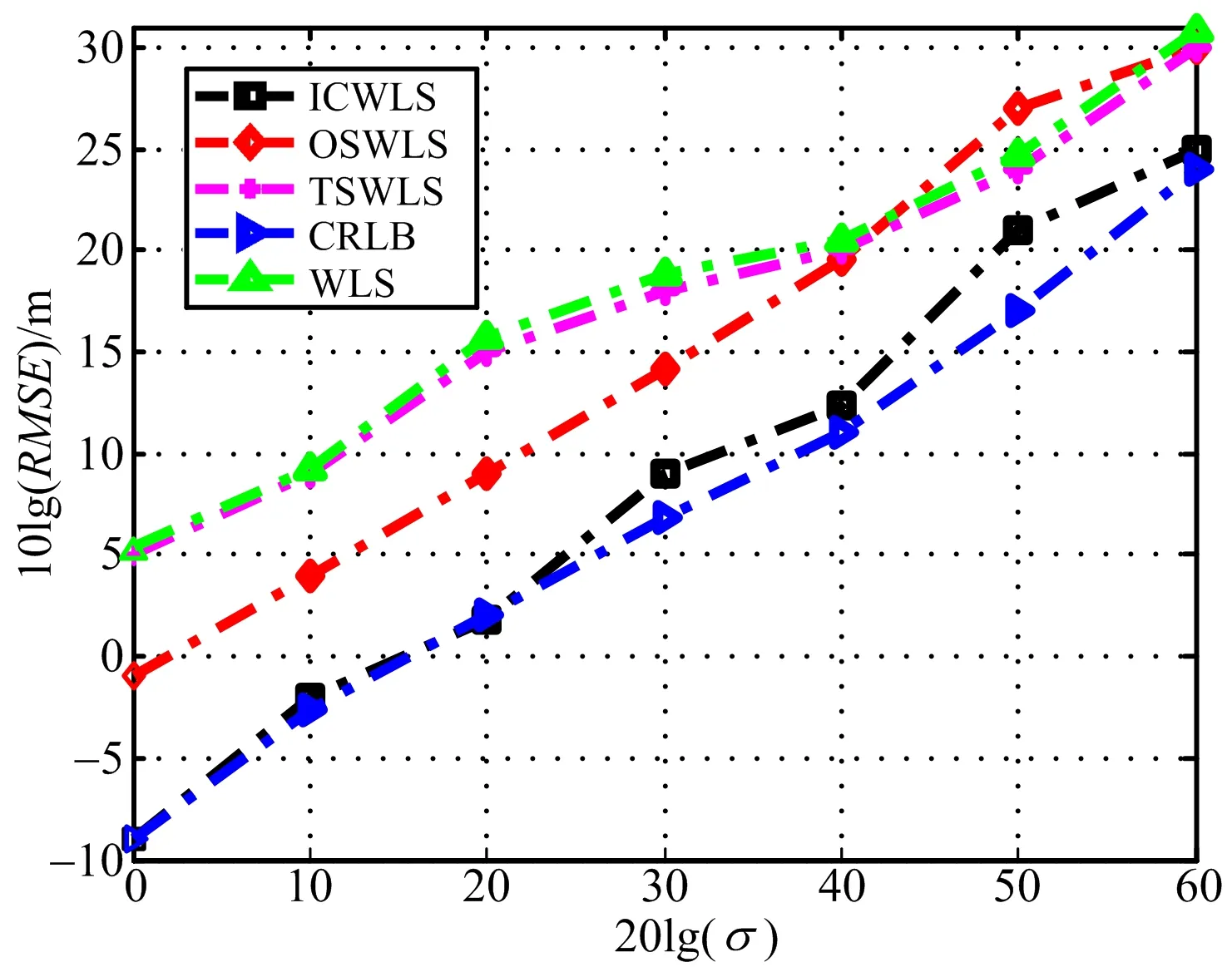
图2 实验一RMSE
图2分析了各算法的RMSE随σ0的变化曲线,且σ0从1~1 000变化。从图2可知,相比于其他算法,提出的ICWLS算法具有更高的定位精度。此外,通过图2发现,在σ0从1~1 000变化期间,ICWLS的RMSE与CRLB精度一致。
3.2 实验二
本次实验中,目标位于平行y轴,且x0=400 m,z0=200 m,R0=600 m,σ0=40。实验数据如图3所示。
从图3可知,ICWLS算法的定位误差RMSE在y轴的变化期间仍低于其他算法,并且逼近于CRLB。与TSWLS算法相比,ICWLS算法的RMSE平均下降了约25%。

图3 实验二RMSE
4 结束语
本文分析了基于双基测距的单一目标的定位问题,并提出迭代的CWLS算法。首先将目标定位问题转化为QCQP,然后再将QCQP问题转化为LCQP问题,进而获取封闭解。最终通过ICWLS算法求解LCQP问题,进而估计目标位置。实验数据表明,提出的ICWLS算法能够有效地控制定位误差。
优化算法,降低算法复杂度,同时考虑多个目标而非单一目标的定位问题,这将是后期研究工作的重点。
猜你喜欢
数学小灵通(1-2年级)(2020年9期)2020-10-27 03:24:26
兵器知识(2019年1期)2019-01-23 02:20:44
汽车维护与修理(2018年3期)2018-12-07 12:48:17
新高考·高一数学(2018年5期)2018-11-22 11:03:52
铁道通信信号(2018年8期)2018-11-10 05:15:48
小猕猴智力画刊(2018年7期)2018-08-08 11:20:42
动漫星空(兴趣百科)(2017年9期)2017-10-30 06:03:34
南方人物周刊(2017年25期)2017-08-25 06:06:50
小星星·阅读100分(低年级)(2017年1期)2017-01-20 19:20:46
读写算(中)(2015年11期)2015-11-07 07:24:51