停车场智能泊车综合系统的优化设计
2019-03-19 06:43:12倪晋平马元锋姬博文
测试技术学报 2019年2期
杨 曈,倪晋平,马元锋,姬博文,,陈 丁
(1.西安工业大学 陕西省光电测试与仪器技术重点实验室,陕西 西安 710021;2.西安北方光电科技防务有限公司 技术中心,陕西 西安 710043)
0 引 言
如今信息智能快速发展,使得智能物流[1]、 智能小车[2]等发展迅速.传统的停车场没有过多的智能化控制,基本需要有人看管,随着大型停车场越来越多的建立,出现了自主停取车辆较难找到车位,自主停放车辆复杂,费时费力等问题.目前,智能化停车场[3]虽在不断应用和改进,但依旧存在各种问题,不能满足用户的需求.
近年来,各项有关智能泊车系统的研究颇多.苗鹏等提出了以STC15F为核心的智能小车,该设计可以完成车辆的自动存放操作[4].陈仲堂基于原车系统采用单片机设计了泊车的测距、 轮速、 转向控制、 电源等一系列控制电路,但该系统处于试验阶段[5].齐学红等设计的系统可以完成自动泊车和自动计费功能[6].曾维鹏等采用无线通讯将小车和停车场相结合,使得小车可以完成自主停放[7].大多数基于单片机的自主泊车系统要考虑小车的碰撞,没有完整的路径规划,并且需要人为控制键盘完成车位的选择,无法做到将小车与停车场完整配合,完成一系列自主停放过程.
本文将智能小车运用在智能泊车这一方面,旨在使车主省去寻找车位以及倒车入库的繁琐过程.采用STC12C5A60单片机控制电路,使得机器人和停车场单元相互配合,集行驶、 检测、 通讯等功能于一体.采用智能车位检测和IC卡识别,存车时,用户将车辆停至停车场入口平台,领取停车卡,取车时,刷卡后等待车辆由机器人送至取车处.操作简便,效率较高,实现了智能化的自主停取车辆、 无人看守设计.
1 系统总体方案
1.1 智能泊车机器人控制系统
智能泊车机器人是设计方案中的核心单元,其控制系统主控芯片选择单片机STC12C5A60S2[8],该单片机有两个独立串口,是新一代高速、 低功耗、 具有超强抗干扰和强抗静电的8051单片机,采用其48引脚的芯片可以满足本设计中对功能的要求.除了单片机最小系统外,硬件电路的设计还包括电源模块、 舵机模块[9]、 电机驱动模块、 无线通讯模块[10]、 循迹模块[11]等.智能车控制系统结构如图 1 所示.电源模块为单片机主控系统提供5 V直流电,开始工作时,停车场系统检测空车位信息通过无线通讯模块传递至小车,小车启动开始工作,到达停车平台下方时,由信号控制舵机模块完成对停车平台升降的操控.小车运行过程中,由电机驱动模块控制小车速度,使小车在循迹模块的主导下,平稳地完成将车辆送至车位或取出送达用户处这一过程.

图 1 智能车控制系统结构Fig.1 The system structure of smart car control
1.2 停车场监控系统
停车场监控系统主要包括用户IC卡发放的射频模块[12]、 空车位检测模块、 无线通讯模块以及停车场主控模块.为了方便设计,停车场的主控芯片同样选择单片机STC12C5A60S2.停车场控制系统结构图如图 2 所示.当用户将车辆开至停车场入口平台时,在射频模块的控制下取卡,入口闸机开启[13],车辆开入停车平台,空车位检测模块开始检测空车位信息并利用无线通讯模块将信息传递至智能小车,完成停放车辆的操作.车主取车时,刷卡显示车辆信息,信号传递至智能小车,将用户车辆从存放车位取出送至停车场出口,交还车主.

图 2 停车场控制系统结构图Fig.2 The system structure of parking control
基于本文设计的智能泊车小车的研究,在停车场控制部分,只是简单地设计了停车场的出入口,智能小车的通讯以及信息显示等部分.停车场的工作流程图如图 3 所示.
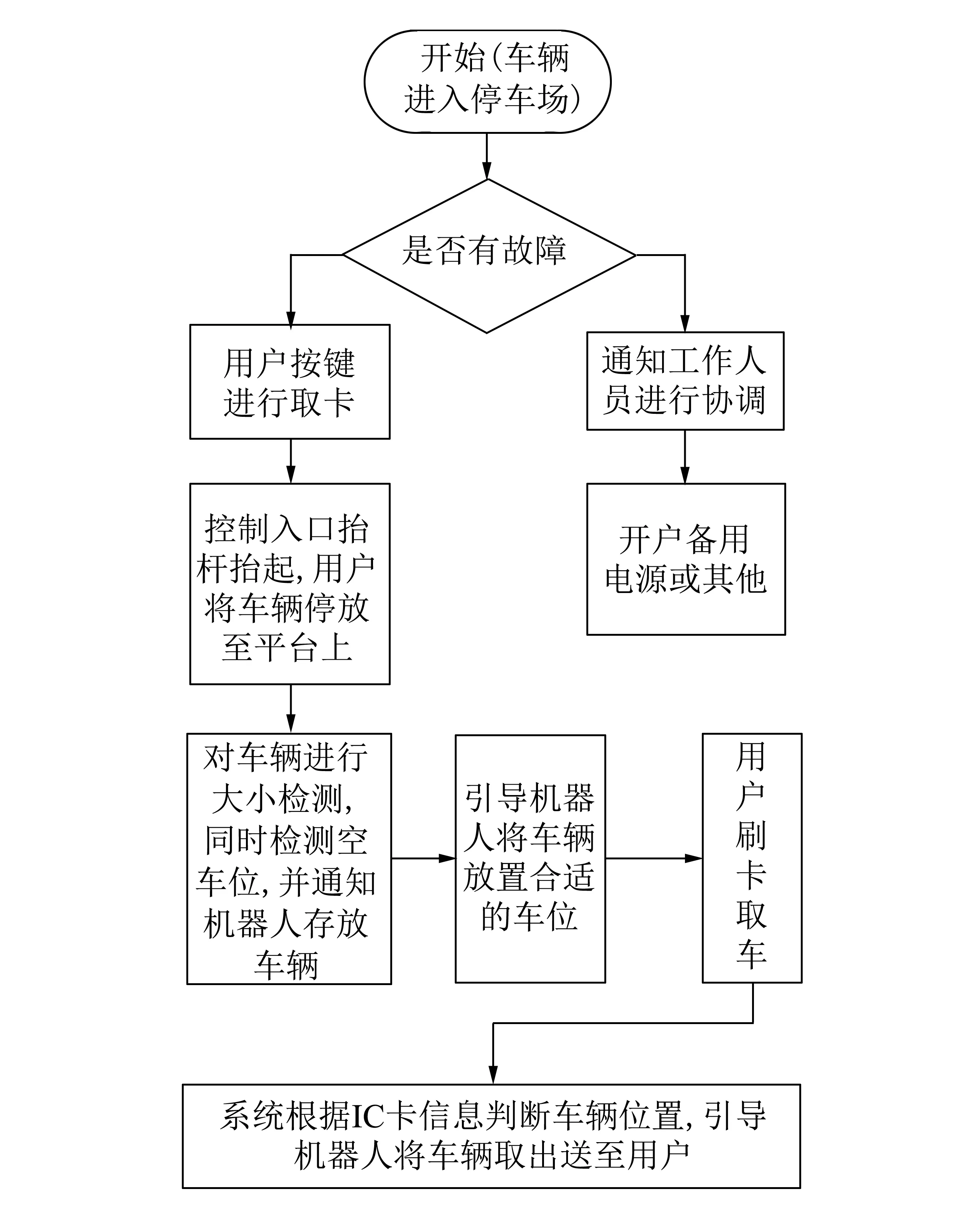
图 3 停车场控制部分工作流程图Fig.3 The work flow chart of parking lot control
2 硬件设计
2.1 智能泊车机器人
2.1.1 底盘选择
本设计采用履带式路虎5底盘(如图 4 所示)作为智能泊车机器人的基本结构.

图 4 履带式路虎5底盘Fig.4 The tracked land rover 5 chassis
该小车特点是控制简单、 运行流畅、 行走稳定、 可原地掉头.与普通四轮小车相比,该小车负载强,不受地形限制,行车较为稳定.该小车底盘齿轮测速编码器采用霍尔传感器,磁圈转一圈可感应8次,方便控制小车车速.
2.1.2 舵机选择
常用的舵机有两种,分别为数字舵机(Digital Servo)和模拟舵机(Analog Servo).本方案采用模拟舵机,其主要由马达、 减速齿轮、 控制电路等组成,在空载时,没有动力被传到舵机马达.当有信号输入时,使舵机移动或者舵机的摇臂受到外力作用时,舵机便会作出反应,向舵机马达传动动力(电压).
为了方便对舵机进行控制,本设计采用金属齿轮模拟舵机作为停车平台的抬起机构.该舵机分别安装在小车的四角,同时控制工作以实现平台的抬起和落下.当用户将车停在平台上后,小车循线进入停车平台下方,控制舵臂抬升将停车平台撑起,当到达车位时,控制舵机使舵臂下降,将停车平台落入地面,完成车辆的停放.
2.1.3 电源模块
方案中的智能小车的电源采用7.2 V电池供电.由于单片机系统中寻迹模块、 数码管等需5 V直流电源供电,而舵机模块需6 V直流电源供电,无线通讯模块需3.3 V电源供电,避繁就简且节省材料,采用一个固定电池,将电池电源在电源模块(如图 5 所示)的作用下转化成一路5 V电源,一路6 V电源.
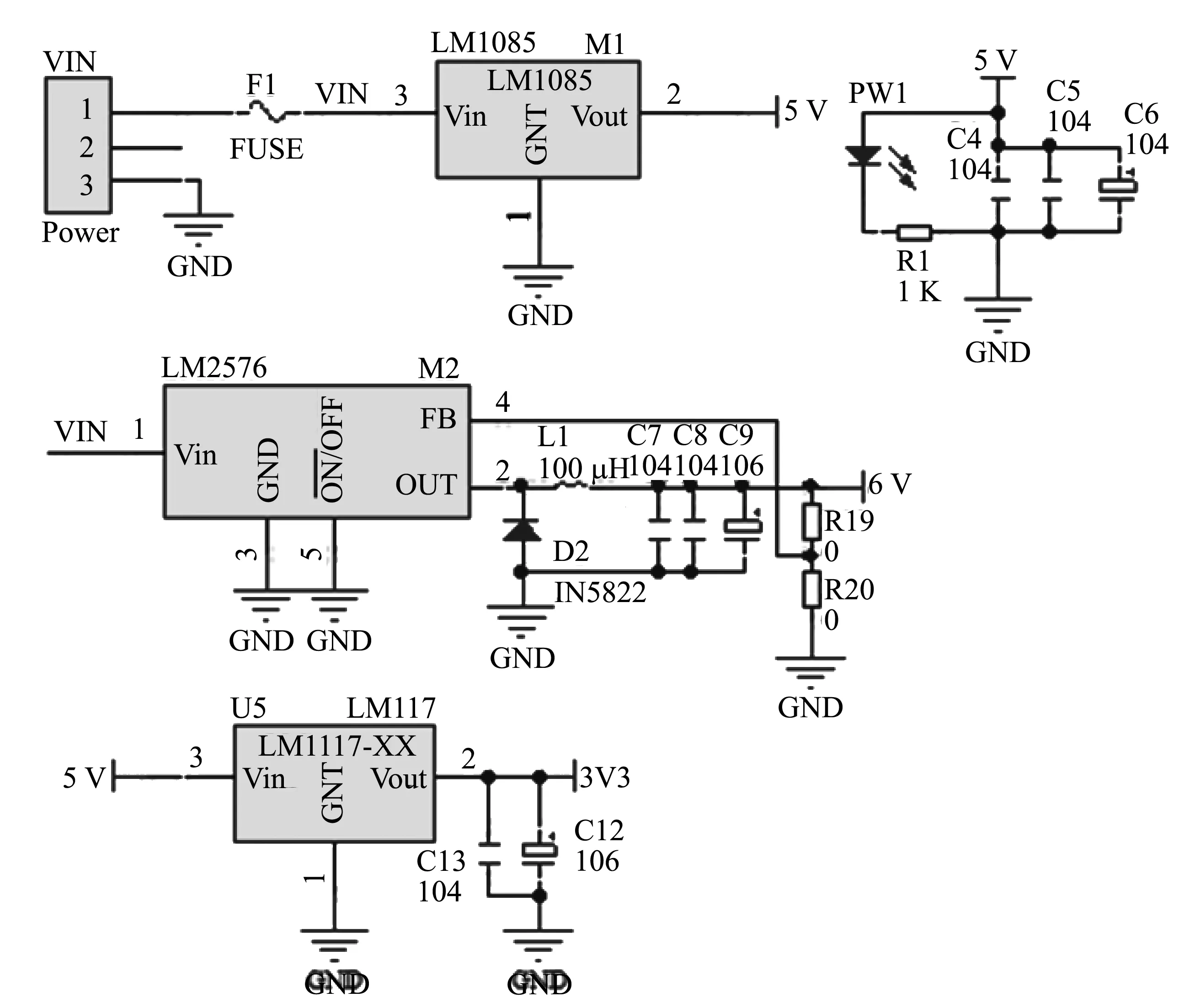
图 5 电源模块原理图Fig.5 The schematic of power module
2.1.4 循迹模块
设计中采用红外探测的循迹方式,即在不同反射特性的物体表面使用不同颜色的红外光.小车在行驶过程中红外光不断地向地面发射,当红外光碰到白色纸质地板时,会发生漫反射现象,反射光被接收管接收; 如果红外光遇到黑线会被吸收,则接收管接收不到红外光.单片机依据是否收到反射回来的红外光来确定黑线的位置和小车的行驶路线.由于红外探测器的探测距离有限,当小车进入循迹模式后,开始连续扫描连接探测器的单片机I/O口,一旦在I/O口中检测到信号,便进入判断处理程序.首先确定哪一个探测器探测到了黑线,如果左面第一级或者第二级传感器探测到了黑线,即为小车左半部分压到黑线,车身会向右偏出,此时应使小车向左转; 如果是右面第一级或第二级传感器探测到黑线,则小车向左偏出了轨迹,则应使小车向右转.在调整了方向后,小车会继续向前行进,不断探测黑线重复上述动作.其电路设计如图 6 所示.
设计采用的漫反射式ITR20001/T收发一体传感器型,是由IR接收管(IR2424-3C)和PT发射管(PT2424-6B)组成的光电开关,其寿命长,可靠性高,响应速度快,灵敏度高,配合循迹模块,可大大提高设计效率.

图 6 红外对管传感器电路图Fig.6 The circuit diagram of infrared tube sensor
2.2 停车场监控
2.2.1 车位检测模块
在本次设计中,考虑到实际情况中存在不同的车辆形状和大小,需要的停放位置大小不同.制作模拟车位时,预留了8个车位信息与主控板对应,车位检测的原理图如图 7 所示.
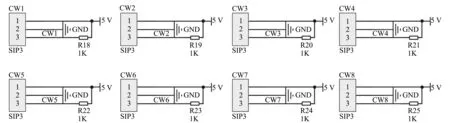
图 7 车位检测原理图Fig.7 The schematic of parking space
空车位的检测所使用的RPR220传感器,是一种一体化反射型光电探测器,其塑料透镜可以提高灵敏度,内置的可见光过滤器可以减小离散光的影响,而且其体积小结构紧凑,不占用太大的位置,可以很好地完成对车位的探测,使停车场在进行车位检测时可以快速地检测到车位信息并将信息传递给小车.
2.2.2 无线数据通讯模块
图 8 为无线通讯模块原理图.由SPI口接无线通讯,WIRE外接无线通讯NRF24L01.NRF24L01无线收发器包括: 频率发生器、 增强型“SchockBurst”模式控制器、 功率放大器、 晶体振荡器、 调制器和解调器.它具有极低的电流消耗,当工作在发射模式下,发射功率为0 dBm 时电流消耗为11.3 mA ,接收模式时为12.3 mA,掉电模式和待机模式下电流消耗更低.

图 8 无线通讯模块原理图Fig.8 The schematic of wireless communication module
SPI所供电压为3.3 V.其工作模式有4种: 收发模式、 配置模式、 空闲模式、 关机模式.在小车行进过程中,无线模块可实现机器人与停车场控制系统的通讯,以识别车位,存取车辆.
3 模拟验证试验
为了更加方便地验证该系统的可行性,设计并制作了微小的模拟实物来对其进行验证.采用如图 9 所示的模拟车位规划.
在无线通讯下,机器人开始工作,到达停车平台,将用户车辆送至系统检测到的空车位处.机器人行进过程如图 10, 图 11 所示.
通过模拟实验,该系统可以完整地完成一系列停车、 取车过程,验证了设计的可行、 可靠性.

图 9 模拟车位规划图Fig.9 The plan drawing of simulated parking spaces

图 10 机器人前往停车平台Fig.10 The schematic of robot goes to parking platform

图 11 机器人将车辆送至车位Fig.11 The schematic of robot sends the vehicle to the parking space
4 结 论
本设计考虑到现实情况下停车场停车困难等问题,结合智能小车提出了一种用于停车场的设计.智能小车技术是一项具有广泛应用前景的技术,本文采用模拟微型实物进行设计和实验,设计出的微型实物可以实现完整的一系列停车,取车过程.同时,该设计也是一种新的停车理念,不仅为高速发展的现代社会节约了人力和时间.此外,也为现代科技发展提供了一种新的思路,为人们的生活带来了方便.
猜你喜欢
汽车实用技术(2023年10期)2023-06-14 07:13:06
汽车实用技术(2022年19期)2022-10-19 07:46:46
汽车实用技术(2022年7期)2022-04-20 11:57:58
军民两用技术与产品(2020年3期)2020-04-07 03:00:26
电子制作(2019年20期)2019-12-04 03:51:14
自动化学报(2019年6期)2019-07-23 01:18:36
电子制作(2018年1期)2018-04-04 01:48:14
电子制作(2017年7期)2017-06-05 09:36:13
制造业自动化(2017年2期)2017-03-20 14:26:08
舰船科学技术(2015年8期)2015-02-27 15:38:46